





- Stock: In Stock
- Product code: 10110-000068
- Weight Brutto: 110.00kg
The PUDU CC1 Green is a four-in-one autonomous commercial scrubber-dryer robot built for small and medium-sized indoor spaces — offices, hotels, retail floors, hospitals, and transit hubs. It combines scrubbing, sweeping, vacuuming, and dust mopping in a single 629 × 552 × 695 mm, 75 kg, IPX4-rated platform. The dual-mode PUDU SLAM navigation system fuses visual and laser positioning, while a 50 Ah battery delivers up to 9 hours of autonomous runtime in silent mopping mode. Peak suction of 17,000 Pa and a cleaning throughput of 700–1,000 m²/h make the CC1 a credible replacement for full-shift manual cleaning operations.
| Max Suction Power | 17,000 Pa |
|---|---|
| Cleaning Efficiency | 700–1,000 m²/h |
| Clean Water Tank / Waste Tank | 15 L / 15 L |
| Battery Life — Silent Mopping Mode | up to 9 h |
The video below shows the PUDU CC1 operating across its four cleaning modes in typical commercial deployment scenarios.
The image below shows the PUDU CC1 Green in its standard deployment configuration — the characteristic white-and-lime chassis with the 10.1-inch LCD face panel and modular lower cleaning deck.

The product overview video below demonstrates all four cleaning modes and the autonomous navigation system across real facility deployments.
Four Cleaning Modes in One Platform: Scrubbing, Sweeping, Vacuuming, Mopping
A single CC1 unit covers four distinct floor-maintenance workflows, consolidating what would otherwise require multiple machines and operator schedules. Each mode is activated by configuring the rear cleaning module and selecting the corresponding setting on the touchscreen — no tools needed for module swaps.
Scrubbing Mode — Deep Hard-Floor Cleaning
Scrubbing mode deploys the washing brush and squeegee for heavy-duty hard-floor treatment. The 63 cm squeegee continuously recovers dirty water at 17,000 Pa suction. Measured at low gear from 100% to 10% battery, scrubbing runtime reaches 5 hours per cycle.
Sweeping Mode — Three Functions in One Pass
The sweeping configuration combines the side brush, sweeping roller, and mopping-vacuuming attachment, completing debris collection, vacuuming, and wet mopping simultaneously. Battery life in this mode is 5 hours. A 2.5 L dustbin collects solid debris between emptying cycles.
Carpet Vacuuming Mode — Short-Pile Carpets
With the separately purchased carpet vacuuming assembly installed, the CC1 transitions to soft-surface cleaning. The 51.5 cm nozzle width covers standard corridor widths in one pass, and the 20 mm maximum surmountable height ensures smooth hard-floor-to-carpet transitions. Battery life in this mode is 4 hours.
Silent Mopping Mode — Acoustically Sensitive Environments
Silent Mopping Mode disables the blower, reducing noise well below the standard < 70 dB(A) threshold. Extended battery life of 9 hours makes this mode well-suited to overnight hospital ward cleaning, late-evening hotel lobbies, and library or office environments with strict acoustic limits.
The rear view below shows the CC1's modular cleaning deck in scrubbing configuration, with the squeegee, main washing brushes, and side brush clearly visible.

PUDU SLAM Navigation: Visual + Laser Positioning for Complex Environments
The CC1 runs on the proprietary PUDU SLAM positioning system, fusing visual SLAM (RGBD sensor, RGB camera, top-view camera) with laser SLAM (2D LiDAR and solid-state LiDAR). This dual-mode architecture handles reflective marble surfaces, glass partitions, and narrow corridor junctions that confuse single-sensor systems. The robot builds a precise map on its first manual push-through and refines it over subsequent sessions.
Minimum path clearance is 70 cm; minimum turning width is 88 cm. Once the map is established, cleaning zones, virtual walls, and no-go regions are configured directly in the mobile app — no physical tape or barriers required.
Tech Tip: When deploying the PUDU CC1 in a new facility, always build the initial map using the raised-handle manual push mode before scheduling the first automatic task. Walking the full cleaning area at low speed lets the SLAM system register every obstacle, glass surface, and tight corner that automated first-run mapping might miss. A thorough initial map significantly reduces interruption frequency during the first week of autonomous operation.
The diagram below illustrates the PUDU SLAM system in action — the robot projecting its dual-sensor cone for simultaneous localisation and real-time map updates on a large commercial tiled floor.

17,000 Pa Suction — Edge-to-Edge Coverage with < 2 cm Wall Gap
Peak suction of 17,000 Pa operates at the squeegee recovery channel — the metric that determines how completely dirty water is removed after scrubbing. The side brush extends effective sweep coverage to 50 cm, pushing debris into the main path rather than redistributing it sideways. The squeegee's edge geometry achieves a < 2 cm gap to walls and corners, covering floor perimeters at rates that straight-path commercial machines cannot match. Wet recovery width across the full squeegee span is 63 cm.
The image below captures the 17,000 Pa suction mechanism in cross-section, showing the high-pressure airflow channel through the cleaning deck during dirty-water recovery.

Extendable Operator Handle: Map Building, Manual Override, Emergency Control
The retractable steering handle serves three distinct purposes. Raised, it enables an operator to push the robot manually for initial map construction or to address unscheduled spills mid-shift. Lowered, it retracts flush with the body for autonomous navigation under the 76 cm minimum passing height constraint. The handle-mounted screen displays live task data — brush speed, suction level, water flow rate — all adjustable in real time during manual operation.
The image below shows the handle in its fully raised position, with the LCD screen angled toward the operator at a comfortable working height during manual push cleaning.

Autonomous Docking Ecosystem: Charging, Water Refill, and Drainage — No Plumbing Required
Combined with the optional PUDU docking station (sold separately), the CC1 completes full autonomous cleaning cycles without manual intervention. When battery falls below threshold, the robot returns to dock, recharges in under 3 hours, replenishes the 15 L clean-water tank, and empties the waste tank — all without building plumbing modifications. For facilities where fixed wall connections are impractical, the PUDU Mobile Water Station (sold separately) provides portable auto-fill and auto-drain capability.
The breakpoint resume function ensures that a low-battery return to dock does not forfeit previously covered area. The robot saves its exact position in the cleaning route and resumes from that precise point after recharging — no zones are skipped or double-cleaned.
The illustration below shows the complete PUDU CC1 ecosystem: the cleaning robot (left), the wall-mounted docking station (centre), and the mobile water station (right).

The docking station front panel, shown below, integrates the visual positioning marker (upper module) and the water-and-power interface connectors (centre block), which the robot locates autonomously using its onboard camera system.

Real-Time App Control and Automated Digital Cleaning Reports
The Android operating system pairs with the PUDU mobile app via 4G, WiFi, and Bluetooth for remote task management, map editing, and multi-robot fleet oversight. Live panels show battery level, clean water volume, waste water volume, and active task progress for every networked CC1 simultaneously. Cleaning parameters — brush speed, suction intensity, water flow rate — are adjustable in real time from the app or directly on the robot's touchscreen.
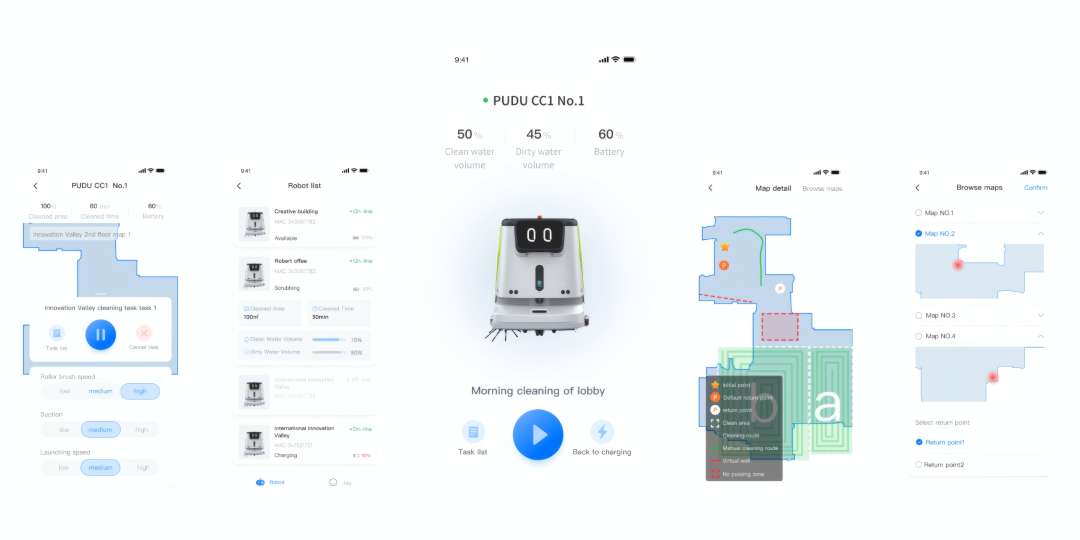
The mobile interface below shows five simultaneous views: active task control with pause and cancel, fleet robot list with per-unit status, real-time robot panel with tank and battery indicators, interactive map detail with cleaning zones and virtual walls, and multi-map selection for facilities with several distinct floor plans.
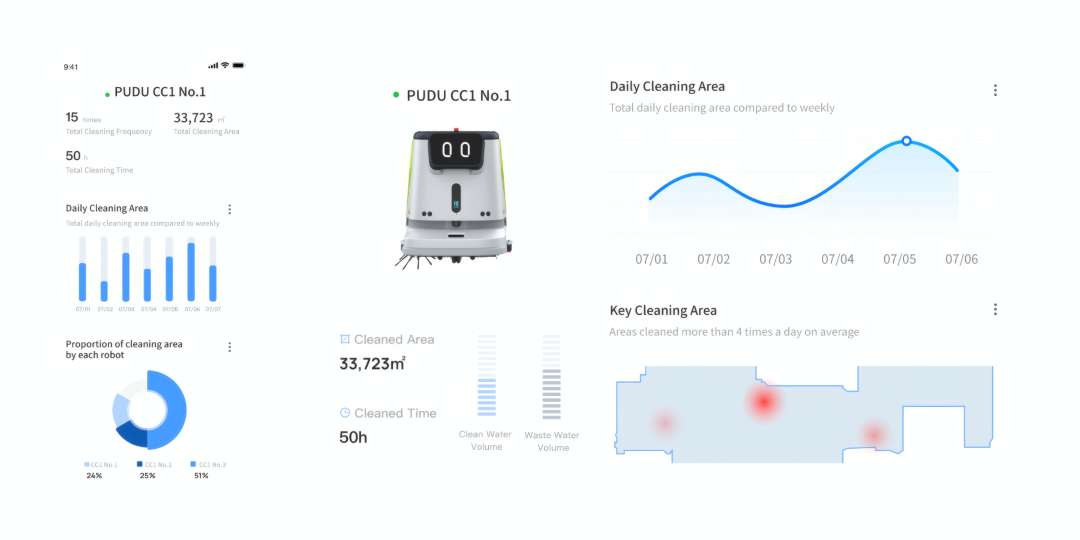
Beyond operational control, the CC1 generates automated daily cleaning reports. The dashboard shown below covers a single unit's cumulative output: 33,723 m² cleaned across 50 hours of runtime, with a daily area trend chart and a heat map identifying zones cleaned four or more times per day — a direct input for maintenance scheduling and resource planning.
Technical Specifications of the PUDU CC1 Green
The isometric view below provides a physical reference for the CC1's overall form factor and cleaning module layout before the full numerical specification tables.

Model & General
| Model | CCBC01 |
|---|---|
| Enclosure Material | PC+ABS |
| Screen | 10.1-inch LCD |
| Operating System | Android |
| IP Rating | IPX4 |
| Cleaning Modes | Scrubbing; Sweeping + Vacuuming + Mopping; Carpet Vacuuming; Silent Mopping |
Dimensions & Weight
| Robot Dimensions (L × W × H) | 629 × 552 × 695 mm |
|---|---|
| Weight | 75 kg |
Cleaning Performance
| Max Suction Power | 17,000 Pa |
|---|---|
| Cleaning Efficiency | 700–1,000 m²/h |
| Working Noise | < 70 dB(A) |
| Dustbin Capacity | 2.5 L |
Cleaning Width
| Cleaning Width with Side Brush (Max) | 50 cm |
|---|---|
| Squeegee / Mopping-Vacuuming Part Width | 63 cm |
| Carpet Vacuum Nozzle Width (optional attachment) | 51.5 cm |
| Edge-to-Wall Gap | < 2 cm |
Navigation & Mobility
| Navigation Method | Integrated LiDAR and visual SLAM positioning (visual SLAM + laser SLAM) |
|---|---|
| Cruise Speed | 0.2–1.2 m/s |
| Max Climbing Angle | 8° |
| Max Surmountable Height | 20 mm |
| Max Surmountable Gap | 35 mm |
| Min Path Clearance | 70 cm |
| Min Turning Width | 88 cm |
| Min Passing Height | 76 cm |
| Operation Mode | Manual / Automatic / Scheduled |
Water System
| Clean Water Tank Capacity | 15 L |
|---|---|
| Recovery (Waste) Tank Capacity | 15 L |
| Auto Water Addition & Drainage | Supported (requires docking station — sold separately) |
Battery & Power
| Battery Capacity | 50 Ah |
|---|---|
| Charging Time | < 3 h |
| Battery Life — Scrubbing Mode | 5 h |
| Battery Life — Sweeping + Vacuuming + Mopping | 5 h |
| Battery Life — Carpet Vacuuming Mode | 4 h |
| Battery Life — Silent Mopping Mode | 9 h |
| Operating Voltage | DC 23 V–29.2 V |
| Power Input | AC 100 V–240 V, 50/60 Hz |
| Power Output | 29.2 V / 15 A |
| Auto Charging | Supported (requires charging or docking station — sold separately) |
Sensor Array
| LiDAR | 2D LiDAR + solid-state LiDAR |
|---|---|
| Cameras | RGBD sensor, RGB camera, top-view camera |
| Ultrasonic Radar | Yes |
Connectivity & Interface
| Communication | 4G, WiFi, Bluetooth; LoRa (optional) |
|---|---|
| Mobile App | Supported |
Application Scope & Environment
| Compatible Floor Types | Terrazzo, marble, tiles, epoxy resin, sandstone, artificial stone, short-pile carpet |
|---|---|
| Working Temperature | 1 °C to 40 °C |
| Storage Temperature | -20 °C to 60 °C |
| Working Relative Humidity | ≤ 85% RH |
| Working Altitude | < 2,000 m |
| Typical Application Scenarios | Office buildings, hotels, retail, hospitals, education, food & beverage, manufacturing, public transport |
What's in the Box
- PUDU CC1 Green cleaning robot (standard assembly)
- Side brush
- Sweeping roller brush
- Mopping-vacuuming attachment (Sweeping Mode)
- Squeegee and washing brush (Scrubbing Mode)
- Mop head (Silent Mopping Mode)
- 50 Ah lithium battery (installed)
- AC 100–240 V charger adapter (29.2 V / 15 A)
- Quick Start Guide
Docking station, charging station, mobile water station, and carpet vacuuming assembly are sold separately.
How to Start an Automatic Cleaning Task on the PUDU CC1
This procedure describes how to launch a preconfigured automatic cleaning task on the PUDU CC1 after the initial cleaning map has been built by the delivery technician.
Step 1: Confirm the Key Switch and Power On
Verify that the key switch (component 21) is in the ON position. Press and hold the power button (component 11) for approximately 3 seconds. The bottom light strip will illuminate in blue, confirming a successful power-on sequence.
Step 2: Position the Robot at the Marker Location
Place the robot directly below (ceiling marker) or in front of (wall marker) the visual positioning marker installed during initial setup. Correct positioning enables the SLAM system to localise the robot on the stored map before the task begins.
Step 3: Select Auto-Cleaning from the Home Screen
Tap "Auto-Cleaning" on the 10.1-inch LCD home screen. A list of previously configured tasks will appear. Select the desired task; if no selection is made, the robot executes the default task.
Step 4: Lower the Handle and Press Start
Lower the retractable handle and screen to the stored position before starting. Failure to lower the handle may prevent the task from initiating. Tap "Start" on the screen; the robot navigates to the cleaning start point






")




















 – Advertising & Reception Robot")

