
- Disponibilidade: Em stock
- Código do produto: 10040-000071
- Peso bruto: 95.00kg
\n El PUDU BellaBot es un robot de reparto aut�nomo de interior dise�ado para\n restaurantes, hoteles y entornos de servicio comercial, que combina posicionamiento SLAM\n integrado l�ser y visual con un dise�o inspirado en un gato galardonado con el\n Good Design Award 2022. Cuatro bandejas inteligentes soportan hasta 10 kg cada una,\n una bater�a intercambiable de 25,6 Ah garantiza entre 12 y 24 horas de servicio\n continuo, y una triple c�mara de profundidad RGBD detecta obst�culos hasta\n 5400 veces por minuto � todo en una plataforma de 55 kg y 1290 mm de altura construida\n en aleaci�n de aluminio de grado aeron�utico.\n
\n\n| Autonom�a de la bater�a | \n12�24 h (bater�a intercambiable de 25,6 Ah) | \n
|---|---|
| Carga por bandeja | \n10 kg/capa � 4 bandejas | \n
| Sistema de navegaci�n | \nSLAM integrado l�ser + visual | \n
| Frecuencia de detecci�n de obst�culos | \nHasta 5400 veces/min | \n
\n La imagen siguiente muestra al BellaBot en su reconocida forma felina,\n reflejado en un espejo para destacar los cuatro niveles de bandejas, la pantalla LCD animada y\n el inconfundible m�dulo de cabeza con orejas de gato que le vali� el galard�n\n Good Design Award 2022.\n
\n \n\n
\n\nGood Design Award 2022: Tecnolog�a de hosteler�a que los clientes recuerdan
\n\n\n El dise�o en un robot de servicio no es cosm�tico � determina si los clientes interact�an con\n la m�quina o la evitan. BellaBot fue concebido a partir de esa premisa. La\n silueta inspirada en un gato, la pantalla LCD de 10,1 pulgadas que muestra docenas de\n expresiones originales animadas y las tiras LED de suave resplandor que recorren el borde de\n cada bandeja se combinan en una identidad visual que resulta acogedora en un comedor, no\n industrial. La carcasa est� fabricada en ABS reforzado con un chasis de\n aleaci�n de aluminio de grado aeron�utico, lo que mantiene el peso total en 55 kg\n con la rigidez estructural necesaria para uso comercial en m�ltiples turnos, con una vida �til\n nominal de 5 a�os.\n
\n\n\n El robot incorpora seis modos operativos: Reparto, Crucero, Reparto\n directo, Cumplea�os, Especial y Gu�a. Las necesidades de un\n restaurante cambian a lo largo del d�a � servicio de mesa al mediod�a, crucero promocional\n durante el happy hour, acompa�amiento de clientes en la cena. Un �nico robot se adapta a todos\n los escenarios sin reprogramaci�n, simplemente seleccionando el modo en la pantalla t�ctil\n Android integrada.\n
\n\nNavegaci�n SLAM dual: el robot que nunca se pierde
\n\n\n La fiabilidad de la navegaci�n separa un despliegue �til de un experimento caro. BellaBot\n utiliza posicionamiento SLAM integrado l�ser y visual � dos m�todos de localizaci�n\n independientes que funcionan simult�neamente. El componente LiDAR genera un mapa ambiental de\n 360� con precisi�n centim�trica; el componente visual ancla el robot a los Marcadores AR\n montados en el techo para correcci�n de posici�n absoluta. En la pr�ctica, BellaBot mantiene un\n posicionamiento preciso incluso cuando se reorganiza el mobiliario, hay obstrucciones parciales\n a los Marcadores o la iluminaci�n var�a entre los distintos servicios. La imagen siguiente\n ilustra el radio de barrido LiDAR de 360� mientras el robot navega por un comedor lleno.\n
\n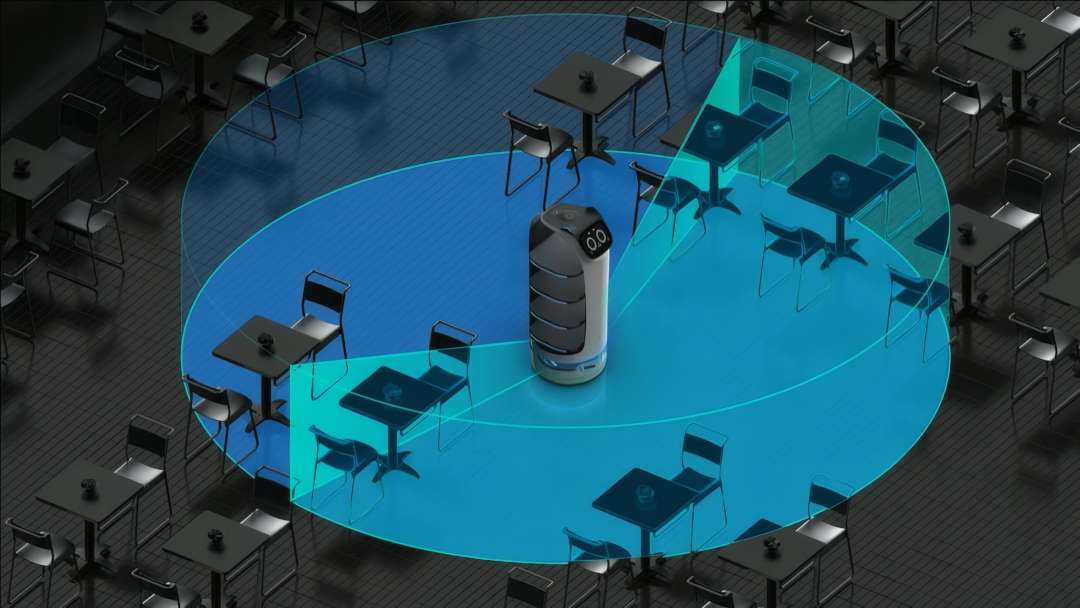 \n\n
\n\nSuspensi�n avanzada: paso suave sobre suelos reales
\n\n\n Los suelos de restaurantes y hoteles rara vez son perfectamente planos. Los cambios entre\n baldosa y moqueta, las juntas de dilataci�n y los grouts irregulares crean micro-obst�culos que\n desestabilizan a los robots de chasis r�gido, provocando oscilaci�n en las bandejas y posibles\n derrames. El chasis de BellaBot incorpora un mecanismo de suspensi�n de muelle amortiguador\n en el conjunto de ruedas motrices, absorbiendo desplazamientos verticales continuos de hasta\n 10 mm. Los platos se mantienen nivelados; los vasos con l�quido permanecen en posici�n\n vertical. La vista en corte de la imagen siguiente revela la geometr�a del muelle y el\n amortiguador integrados en el m�dulo de tracci�n.\n
\n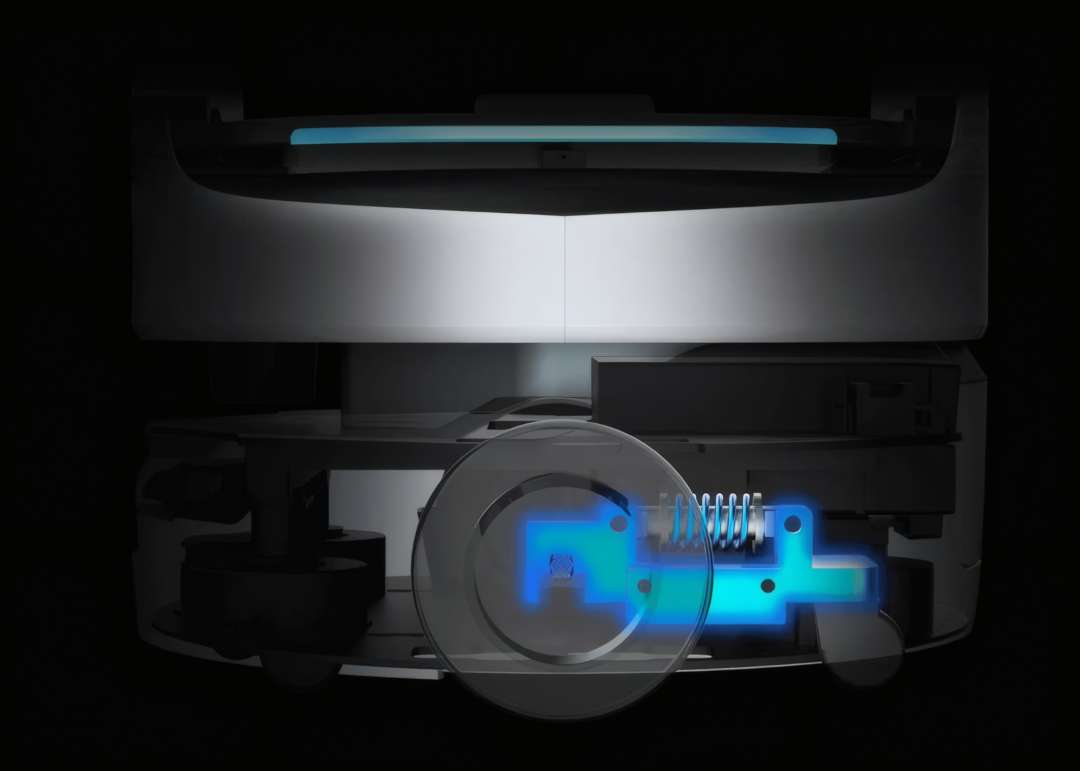 \n\n
\n\nSistema de detecci�n de seguridad en tres capas
\n\nTriple c�mara RGBD: tiempo de respuesta de 0,5 segundos
\n\n\n Los obst�culos m�s peligrosos en un restaurante no son los muebles � son las piernas en\n movimiento, los ni�os agachados por debajo de la altura de los sensores y los objetos dejados\n en el suelo de improviso. BellaBot lo resuelve con tres c�maras de visi�n de profundidad\n RGBD frontales en el anillo inferior del chasis, ofreciendo la percepci�n 3D m�s s�lida de\n su categor�a seg�n PUDU. El robot puede detectar un obst�culo con precisi�n e iniciar una\n parada completa con un tiempo de respuesta de solo 0,5 segundos. La imagen siguiente\n muestra las tres aperturas RGBD montadas en el anillo de acento azul en la base del m�dulo de\n cabeza.\n
\n \n\n
\n\nFrecuencia de detecci�n: hasta 5400 barridos por minuto
\n\n\n La frecuencia de detecci�n determina la rapidez con que el robot reacciona ante obst�culos\n din�micos � un cliente que empuja la silla hacia atr�s, un camarero que cruza su trayectoria.\n La bater�a de sensores de BellaBot alcanza una tasa de refresco de hasta 5400 veces por\n minuto, lo que equivale a un nuevo barrido ambiental aproximadamente cada 11 milisegundos.\n La infograf�a siguiente muestra esta cifra junto con el cono de barrido direccional proyectado\n frente al robot.\n
\n \n\n
\n\nArco y alcance de detecci�n: 192,64� a m�s de 10 metros
\n\n\n La geometr�a de cobertura es tan importante como la tasa de refresco. El arco de detecci�n\n frontal de BellaBot abarca 192,64� � m�s ancho que la propia huella del robot � con un\n alcance de detecci�n que supera los 10 m. Esto permite que BellaBot comience a planificar\n una trayectoria de esquiva mucho antes de que el obst�culo entre en la distancia m�nima de frenada,\n produciendo las correcciones de ruta suaves y pausadas que caracterizan a los robots de servicio\n bien desplegados. El diagrama siguiente ilustra el hemisferio completo de cobertura de sensores.\n
\n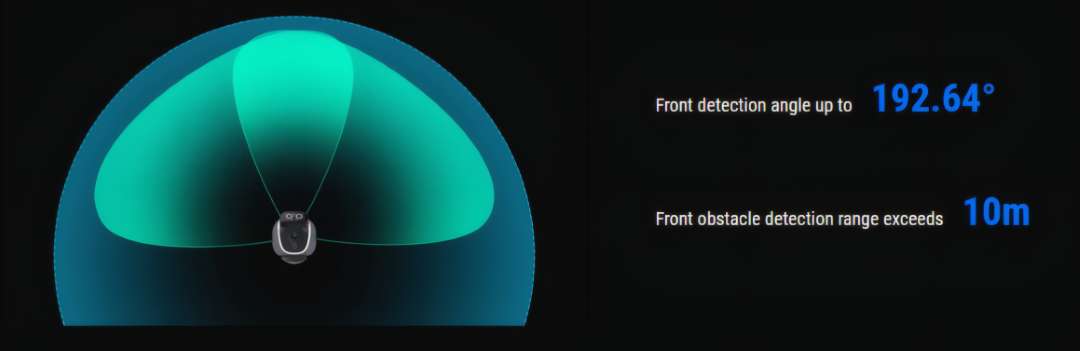 \n\n
\n\nInteracci�n humano-robot multimodal
\n\nExpresiones faciales inteligentes: docenas de animaciones originales
\n\n\n Los clientes responden de forma diferente ante un robot que parece tener personalidad. La\n pantalla LCD de 10,1 pulgadas de BellaBot ejecuta una librer�a de docenas de expresiones\n faciales originales y exclusivas � alerta, alegre, curioso, so�oliento y varios grados de\n contrariedad � que se activan contextualmente en funci�n del estado operativo, las entradas\n t�ctiles y los eventos de finalizaci�n de tareas. La tira de expresiones que se muestra a\n continuaci�n ilustra la amplitud de la librer�a de animaciones.\n
\n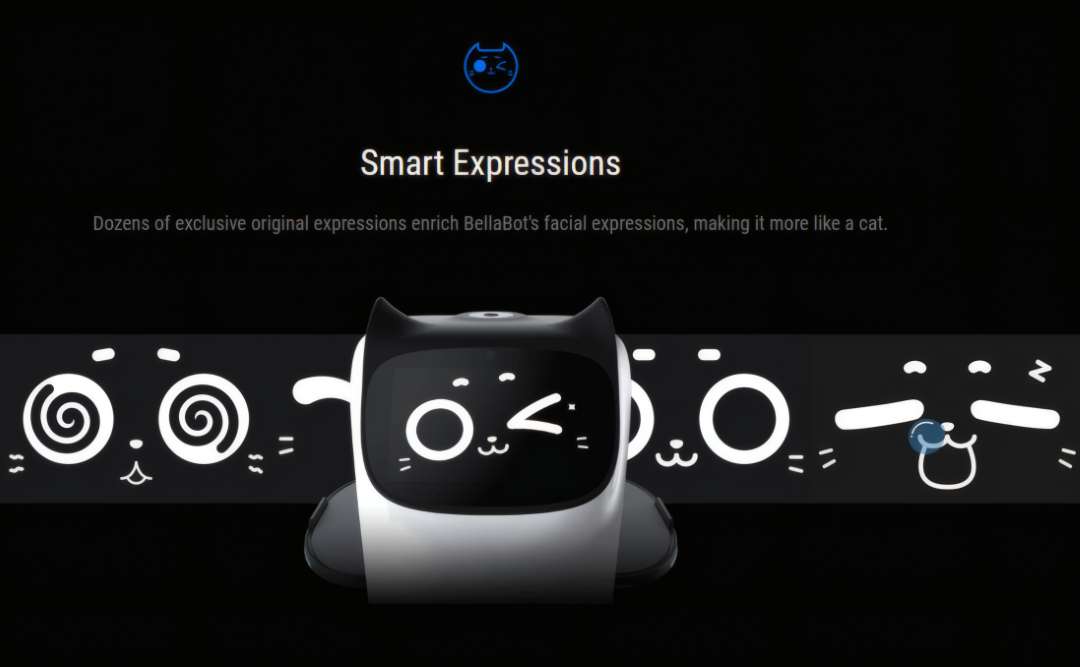 \n\n
\n\nRetroalimentaci�n h�ptica: un toque que el robot siente
\n\n\n Cada oreja y la superficie superior de la cabeza de BellaBot incorporan un sensor t�ctil\n con retroalimentaci�n h�ptica. Una sola caricia desencadena una respuesta amigable y\n agradable; las caricias repetidas escalan a reacciones cada vez m�s entusiastas; demasiados\n toques r�pidos provocan una leve expresi�n de disgusto. Este bucle crea un momento memorable\n para los clientes � especialmente las familias con ni�os � convirtiendo cada entrega en un\n breve punto de contacto positivo para el local. La imagen siguiente muestra la distribuci�n de\n sensores h�pticos en el m�dulo de cabeza.\n
\n \n\n
\n\nInteracci�n luminosa: estado comunicado sin palabras
\n\n\n Las tiras LED de segunda generaci�n de BellaBot recorren el borde de cada bandeja y el\n anillo de la base, con diferentes patrones que se�alan el estado operativo � bandeja lista,\n tarea en curso, cargando o error � sin necesidad de que el personal o los clientes consulten\n la pantalla. Los LED de cada bandeja indican exactamente de cu�l debe recoger el cliente su\n pedido, eliminando confusiones en los repartos con m�ltiples destinos. El panel triple siguiente\n muestra el m�dulo de emergencia, la iluminaci�n del borde de las bandejas y el contorno de las\n orejas en diferentes estados operativos.\n
\n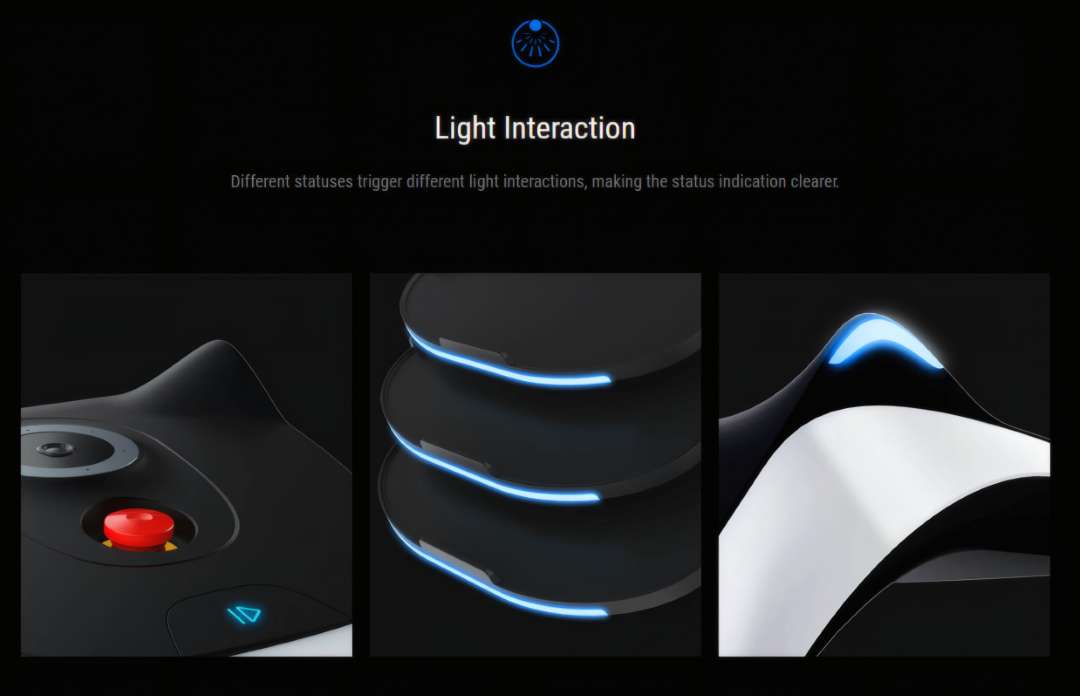 \n\n
\n\nBandejas inteligentes con sensores infrarrojos
\n\n\n Cada una de las cuatro bandejas de BellaBot integra un sensor de presencia por infrarrojos\n que detecta si la bandeja est� cargada o vac�a. Cuando se retira un pedido, el sensor se�aliza\n al robot: con el sensor de bandeja activado, BellaBot finaliza autom�ticamente la tarea de mesa\n actual y pasa a la siguiente 5 segundos despu�s de que se retira el �ltimo plato, sin\n intervenci�n del personal. La estructura modular de desmontaje r�pido permite sustituir una\n unidad de bandeja en segundos. Cada bandeja mide 410 mm � 510 mm y soporta hasta\n 10 kg. La imagen siguiente muestra los arcos de sensor infrarrojo luminosos integrados\n en el borde de las bandejas.\n
\n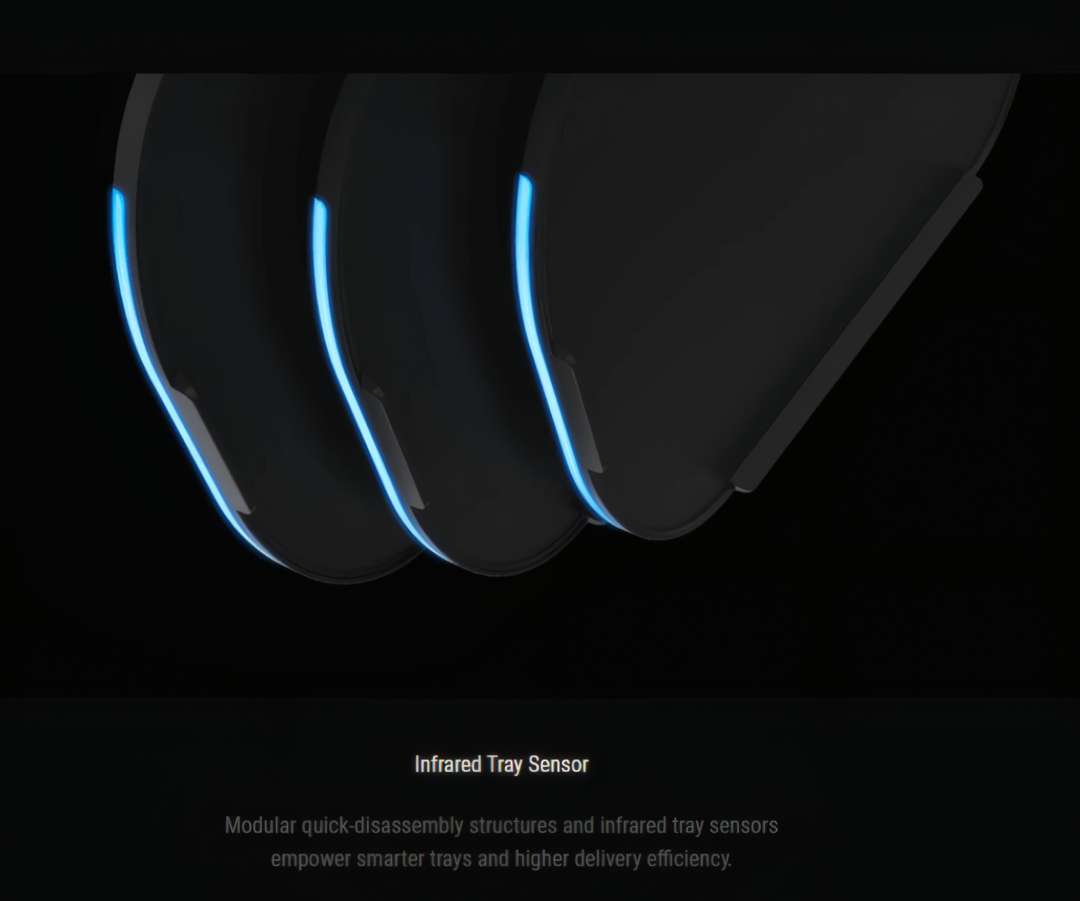 \n\n
\n\nBater�a intercambiable: de 12 a 24 horas de servicio ininterrumpido
\n\n\n Los robots de servicio convencionales requieren una pausa de carga de 4�5 horas por turno.\n BellaBot elimina esa restricci�n con un dise�o de bater�a intercambiable en caliente.\n El paquete de litio de 25,6 Ah se desliza fuera de la base en segundos, permitiendo\n insertar un repuesto precargado y reanudar el servicio de inmediato. En condiciones t�picas de\n actividad mixta, la autonom�a abarca entre 12 y 24 horas. La recarga del paquete\n agotado tarda 4,5 horas a 29,4 V / 8 A. La imagen siguiente muestra el\n mecanismo de extracci�n con el paquete de bater�a parcialmente eyectado.\n
\n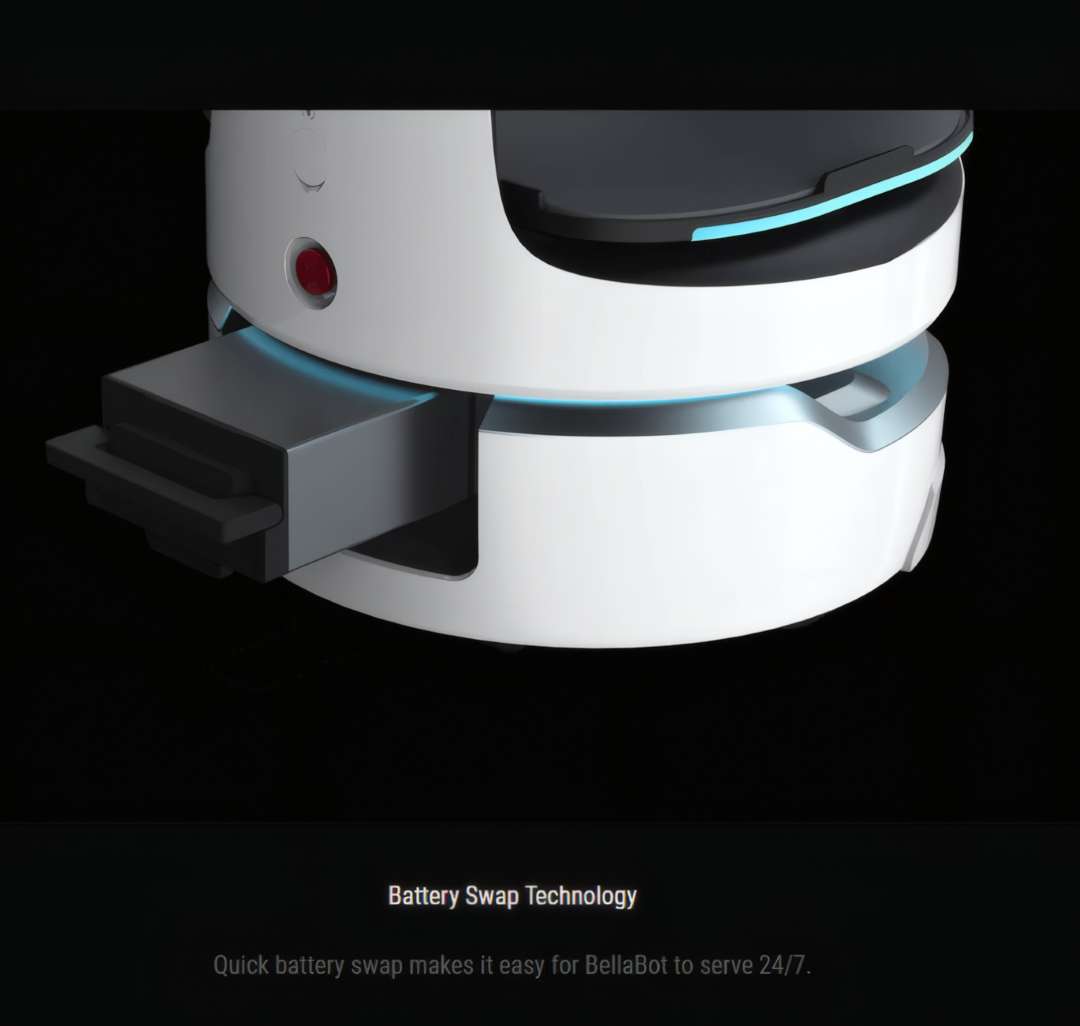 \n\n
\n\nInteligencia de flota multirrobot
\n\n\n Un �nico BellaBot transforma un comedor. Una flota coordinada transforma una operaci�n.\n Varias unidades comparten datos de posicionamiento y tareas por WiFi, habilitando una gesti�n\n inteligente de atraque: cada robot selecciona autom�ticamente la estaci�n de recogida libre m�s\n cercana; si durante el servicio de mayor afluencia todas las estaciones est�n ocupadas, las\n unidades esperan en posiciones de espera temporales y se desplazan a una estaci�n en cuanto\n queda libre � evitando la congesti�n en el pase de cocina. El diagrama siguiente muestra tres\n unidades BellaBot intercambiando se�ales de coordinaci�n a lo largo del comedor.\n
\n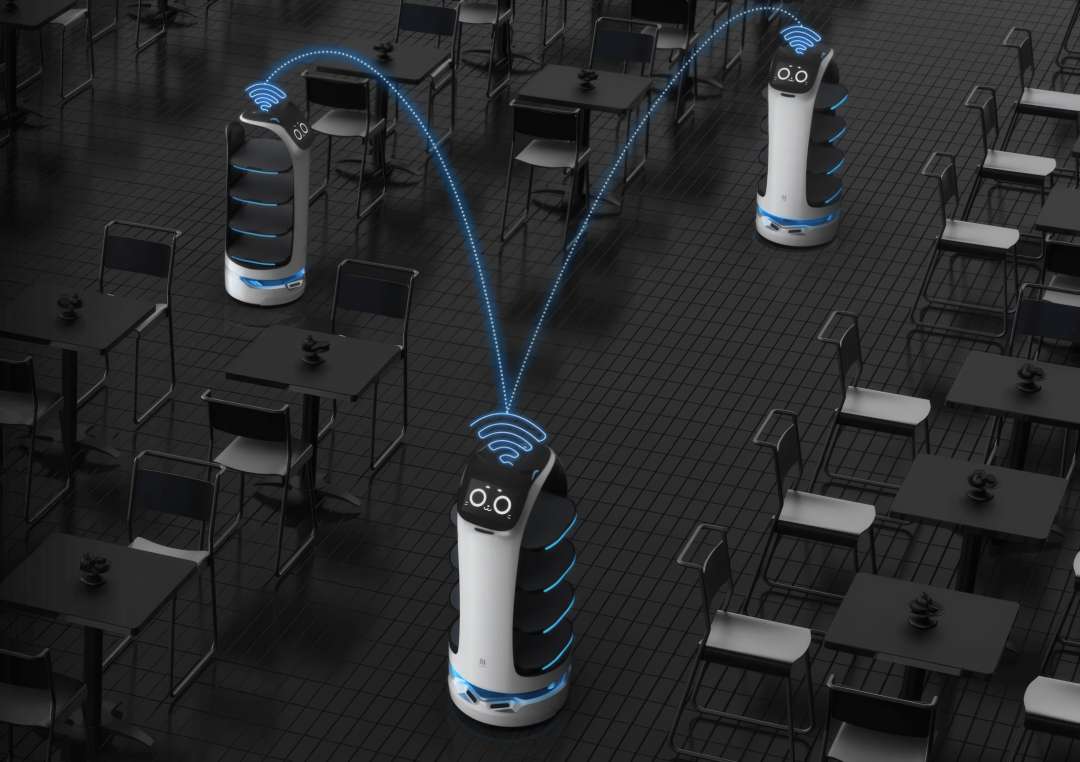 \n\n
\n\nEspecificaciones t�cnicas del PUDU BellaBot
\n\n\n El collage multivista siguiente proporciona una referencia visual de la disposici�n del\n hardware del BellaBot � perfil lateral, vista cenital del m�dulo de cabeza, perspectiva\n trasera y la silueta caracter�stica con la pila de bandejas � antes de las tablas completas\n de especificaciones.\n
\n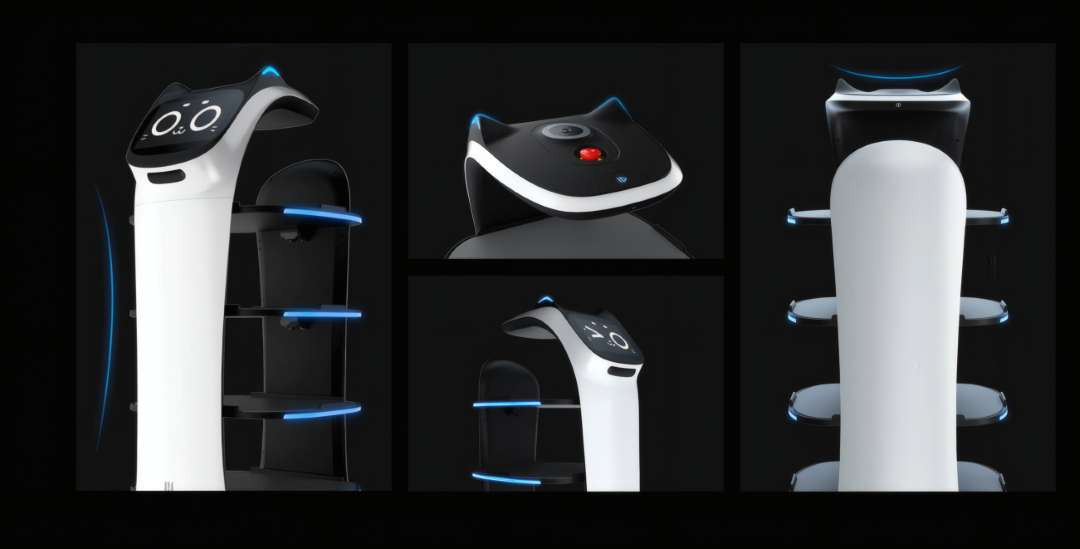 \n\n
\n\n Dimensiones mec�nicas
\n| Dimensiones del robot (L � A � H) | \n565 mm � 537 mm � 1290 mm | \n
|---|---|
| Peso del robot | \n55 kg | \n
| Material de la carcasa | \nABS + aleaci�n de aluminio de grado aeron�utico | \n
| Grado de protecci�n | \nIP20 | \n
| Vida �til | \n5 a�os | \n
Alimentaci�n y bater�a
\n| Tensi�n de funcionamiento | \nDC 23�29,4 V | \n
|---|---|
| Entrada de alimentaci�n | \nAC 100�240 V, 50/60 Hz | \n
| Salida del cargador | \n29,4 V, 8 A | \n
| Capacidad de la bater�a | \n25,6 Ah (intercambiable en caliente) | \n
| Tiempo de carga | \n4,5 h | \n
| Autonom�a de la bater�a | \n12�24 h | \n
Navegaci�n y movilidad
\n| Sistema de navegaci�n | \nPosicionamiento SLAM integrado l�ser y visual | \n
|---|---|
| Velocidad de crucero | \n0,2�1,2 m/s (ajustable) | \n
| Anchura m�nima de paso | \n70 cm | \n
| Anchura m�nima de giro | \n65 cm | \n
| Altura m�xima superable | \n10 mm | \n
| �ngulo m�ximo de rampa | \n5� | \n
| Requisito de superficie | \nInterior, suelo plano y liso | \n
Bandejas y carga �til
\n| N�mero de bandejas | \n4 | \n
|---|---|
| Dimensiones de la bandeja | \n410 mm � 510 mm | \n
| Carga por bandeja | \n10 kg/capa | \n
| Distancia entre bandejas (de arriba a abajo) | \n230 mm / 200 mm / 200 mm / 180 mm | \n
| Sensores de bandeja | \nSensores de presencia por infrarrojos (desmontaje r�pido modular) | \n
Sensores y percepci�n
\n| LiDAR | \nBarrido horizontal de 360� (nueva generaci�n) | \n
|---|---|
| C�maras de visi�n de profundidad | \n3 � RGBD (sensores de profundidad de calidad Intel) | \n
| �ngulo de detecci�n frontal | \nHasta 192,64� | \n
| Alcance de detecci�n frontal | \n> 10 m | \n
| Frecuencia de detecci�n de obst�culos | \nHasta 5400 veces/min | \n
| Tiempo de respuesta RGBD | \n0,5 s | \n
| Sensor visual (posicionamiento) | \nS� � c�mara de Marcador montada en la parte superior | \n
Pantalla y audio
\n| Tama�o de pantalla | \n10,1 pulgadas LCD | \n
|---|---|
| Sistema operativo | \nAndroid | \n
| Micr�fono | \nArray circular de 6 micr�fonos | \n
| Altavoces | \n2 � 10 W est�reo | \n
| Expresiones faciales | \nDocenas de expresiones animadas originales | \n
| Retroalimentaci�n h�ptica | \nS� � sensores t�ctiles en cabeza y orejas | \n
| Interacci�n LED | \nS� � tiras LED interactivas de segunda generaci�n | \n
| Activaci�n por voz | \n"Bella, Bella" (palabra de activaci�n de voz) | \n
Modos operativos
\n| Modo Reparto | \nReparto simult�neo a m�ltiples mesas con planificaci�n �ptima de ruta | \n
|---|---|
| Modo Crucero | \nPatrulla aut�noma por ruta predeterminada con promoci�n por voz | \n
| Modo Reparto directo | \nEntrega unidireccional a un �nico destino sin retorno al punto de recogida | \n
| Modo Cumplea�os | \nEntrega con m�sica de cumplea�os personalizable y mensaje en pantalla matricial | \n
| Modo Especial | \nM�sica y voz personalizadas para propuestas, celebraciones y eventos especiales | \n
| Modo Gu�a | \nRecepci�n de clientes y acompa�amiento a mesa con retorno autom�tico al punto de bienvenida | \n
Condiciones ambientales
\n| Temperatura de trabajo | \n0�40 �C | \n
|---|---|
| Temperatura de almacenamiento | \n-40�65 �C | \n
| Humedad de trabajo | \nHR ? 85% | \n
| Altitud m�xima de trabajo | \n< 2000 m | \n
\n\n
Contenido del paquete
\n- \n
- Robot de reparto PUDU BellaBot � 1 \n
- Cargador (29,4 V / 8 A) � 1 \n
- Manual de usuario BellaBot � 1 \n
- Certificado de calidad � 1 \n
- Adhesivo de posicionamiento � 1 \n
- Llave de encendido � 1 \n
- Marcadores AR � 1 juego \n
\n\n
C�mo encender BellaBot y realizar la primera entrega
\n\n Este procedimiento describe c�mo arrancar el PUDU BellaBot y ejecutar una primera entrega\n de mesa usando el Modo Reparto. Aseg�rese de que el mapa de despliegue est



















 � Robot de Publicidad y Hostes")


