
- Disponibilidade: Em stock
- Código do produto: 10050-000069
- Peso bruto: 90.00
\n El PUDU HolaBot es un robot de servicio aut�nomo de alta\n capacidad dise�ado para entornos de hosteler�a, sanidad y comercio con alto\n volumen de actividad. Con un peso propio de 55 kg y una altura de\n 1228 mm, transporta hasta 60 kg de carga distribuida en cuatro\n bandejas ajustables � 15 kg por nivel � desplaz�ndose de forma aut�noma\n mediante navegaci�n SLAM l�ser y visual integrada, con una velocidad de\n crucero de 0,5�1,2 m/s y hasta 12 horas de autonom�a por carga.\n
\n\n| Capacidad de carga total | \n60 kg (15 kg por bandeja � 4 bandejas) | \n
|---|---|
| Tecnolog�a de navegaci�n | \nSLAM l�ser + visual integrado | \n
| Autonom�a de la bater�a | \n12 h (sin carga), pack 25,6 Ah extra�ble | \n
| Velocidad de crucero | \n0,5�1,2 m/s (ajustable) | \n
\n La imagen siguiente muestra el HolaBot con sus cuatro\n bandejas transparentes iluminadas en configuraci�n completa, cada una\n clasificada para 15 kg en superficies planas, ofreciendo una carga �til\n combinada que pocos robots de servicio comerciales pueden igualar en este\n segmento de precio.\n
\n \n\n
\n\nCuatro modos de funcionamiento para cada escenario de negocio
\n\n\n El HolaBot no limita al personal a un �nico flujo de trabajo: ofrece cuatro\n modos de tarea seleccionables directamente desde su\n pantalla LCD Android de 10,1". El modo de entrega despacha\n platos a varias mesas en un solo viaje planificando autom�ticamente la ruta\n m�s corta. El modo de recogida invierte el flujo � el robot visita\n hasta 20 puntos de recogida y consolida los art�culos en una estaci�n de\n retorno central. El modo crucero mantiene al robot circulando por una\n ruta predefinida a intervalos de tiempo ajustables, ideal para l�neas de buf�\n o zonas de refresco en retail. El modo directo env�a el robot a un\n �nico destino y lo detiene al completar la tarea, sin regreso autom�tico.\n
\n\n\n El diagrama siguiente ilustra el flujo de trabajo de recogida en restaurante:\n paradas numeradas, planificaci�n aut�noma de la ruta de navegaci�n y retorno\n autom�tico a la zona de fregado, todo sin intervenci�n humana.\n
\n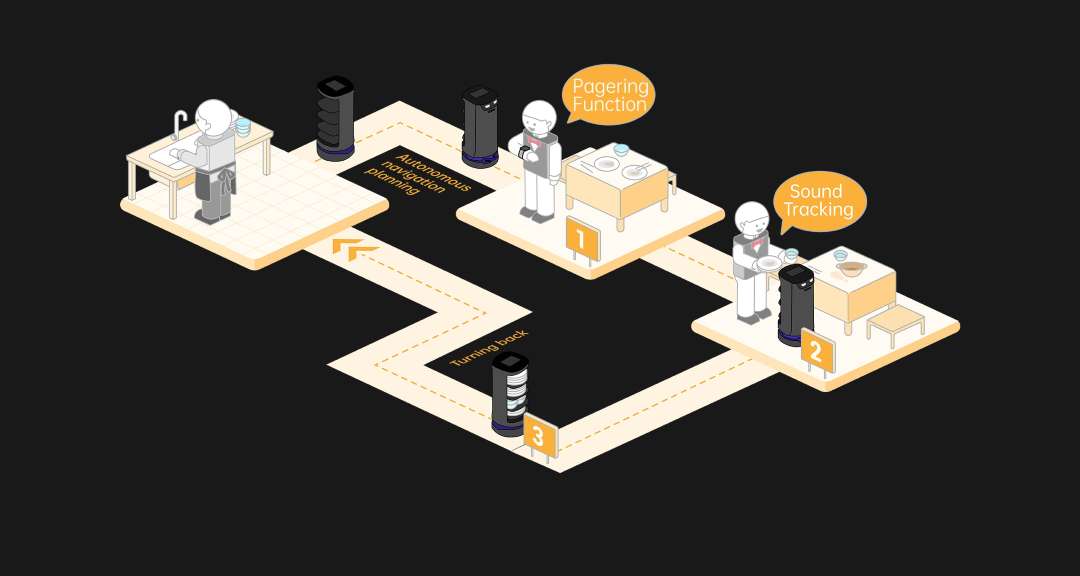 \n\n
\n\nCompartimento interior de 120 L: capacidad real para cocinas exigentes
\n\n\n El cuerpo cerrado del HolaBot alberga un\n compartimento de 120 L de gran capacidad dividido en cuatro bandejas de\n 390 � 360 mm cada una. Sobre superficie plana, cada bandeja admite\n 15 kg; al cruzar un umbral de 5 mm la carga segura se reduce a\n 10 kg por bandeja. El espacio entre bandejas es asim�trico por dise�o �\n el hueco superior mide 216 mm mientras que los tres inferiores son de\n 184 mm cada uno � lo que permite albergar recipientes altos en el nivel\n superior y maximizar el volumen en los dem�s. Las cuatro bandejas son\n regulables en altura. Toda la estructura es aleaci�n de aluminio de grado\n aeron�utico con paneler�a ABS: r�gida, resistente a la corrosi�n y\n suficientemente ligera para mantener el peso propio del robot en 55 kg.\n
\n\n\n El panel frontal que se muestra a continuaci�n refleja el dise�o industrial\n del HolaBot: sensores de visi�n en profundidad en la parte superior, frontal\n con textura de fibra de carbono con franja LED cyan y el logotipo de Pudu\n Robotics � una silueta concebida para integrarse con discreci�n en\n restaurantes de alto nivel o espacios cl�nicos.\n
\n \n\n
\n\nCinco m�todos de llamada: el robot acude cuando se le necesita
\n\n\n El HolaBot integra cinco canales de llamada independientes para que el\n personal lo convoque del modo que mejor se adapte a su flujo de trabajo:\n smartwatch mediante la app de Pudu, Pudulink consola digital,\n buscapersonas (m�dulo Lora), tarjeta NFC en la mesa y\n beeper ac�stico. El modelo de llamada por buscapersonas resulta\n especialmente adecuado para establecimientos de gran superficie: con solo\n pulsar un bot�n en la mu�equera o el buscapersonas, el robot se despacha en\n tiempo real hasta el punto de llamada exacto sin que el personal de sala tenga\n que interactuar con ninguna pantalla.\n
\n\n\n La interfaz del smartwatch que se muestra a continuaci�n confirma el modelo de\n despacho en tiempo real: el solicitante recibe la confirmaci�n de "Calling"\n con el identificador de mesa (A0723 en este ejemplo) y una opci�n de\n cancelaci�n con un solo toque.\n
\n \n\n
\n\nAir Motion: interacci�n t�ctil sin contacto
\n\n\n En entornos donde los protocolos de higiene hacen indeseable el contacto con\n pantallas � quir�fanos, pasillos de preparaci�n alimentaria o zonas de\n aislamiento � la tecnolog�a\n Air Motion del HolaBot permite el control sin contacto. Un sensor de\n gestos por infrarrojos montado en la corona del robot detecta la proximidad de\n la mano y gestos predefinidos sin necesidad de tocar la pantalla ni la\n superficie del cuerpo. El rastreo de sonido complementa esta funci�n: el robot\n puede orientarse hacia una fuente de voz, lo que permite dirigir su pr�xima\n acci�n con instrucciones verbales.\n
\n\n\n La imagen siguiente muestra la funci�n Air Motion en operaci�n: una mano\n hologr�fica sobre la pantalla LCD ilustra la zona de detecci�n de proximidad\n donde se registran los gestos de deslizamiento y toque sin contacto f�sico.\n
\n \n\n
\n\nNavegaci�n SLAM: fusi�n l�ser + visual para una localizaci�n fiable
\n\n\n La precisi�n de navegaci�n es el par�metro operativo m�s cr�tico de un robot\n de servicio. El HolaBot combina un sensor LiDAR personalizado (FOV\n horizontal 220�, montado a 0,21 m del suelo) con dos c�maras de profundidad\n RGB-D � una en posici�n alta (1 m del suelo, cobertura de obst�culos al nivel\n del torso y la cabeza) y otra junto a la base (0,12 m, detecci�n de obst�culos\n bajos y escalones). Esta fusi�n proporciona posicionamiento SLAM en tiempo\n real con un ancho m�nimo de paso de tan solo 70 cm. Se admiten tres\n m�todos de cartograf�a: marcadores, l�ser o la combinaci�n de ambos,\n seleccionables seg�n las caracter�sticas del local.\n
\n\n\n El diagrama de corredor hospitalario que se muestra a continuaci�n ilustra el\n HolaBot en un entorno sanitario: la funci�n de buscapersonas activa la\n navegaci�n aut�noma hacia habitaciones espec�ficas, mientras el rastreo de\n sonido proporciona una referencia de orientaci�n secundaria � el robot se gira\n hacia el personal que lo llama antes de continuar su ruta.\n
\n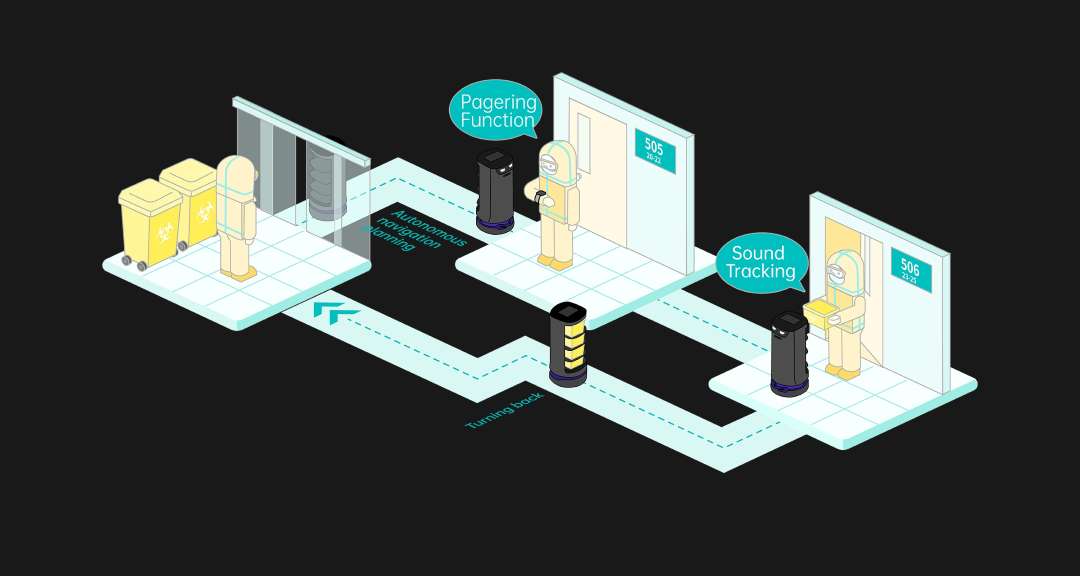 \n\n
\n\nBase con suspensi�n acoplada: tr�nsito suave, carga protegida
\n\n\n La base del HolaBot integra un mecanismo de suspensi�n acoplada que\n nivela autom�ticamente el chasis al atravesar juntas de suelo, umbrales de\n puerta y transiciones entre revestimientos. Puede superar obst�culos de hasta\n 7 mm de altura y pendientes de hasta 5�. No se trata de una\n funci�n pasiva: el acoplamiento con muelle absorbe activamente los\n micro-impactos que de otro modo se transmitir�an a las bandejas cargadas. Con\n 15 kg por bandeja, la diferencia entre un impacto duro y una transici�n\n amortiguada es la diferencia entre cristaler�a intacta y un incidente de\n rotura.\n
\n\n\n El corte en secci�n X que se muestra a continuaci�n expone el conjunto de\n suspensi�n de la base: el elemento de acoplamiento con muelle (destacado en\n azul) se sit�a entre el bastidor de las ruedas y el cuerpo superior,\n absorbiendo el desplazamiento vertical antes de que se propague a trav�s de la\n pila de bandejas.\n
\n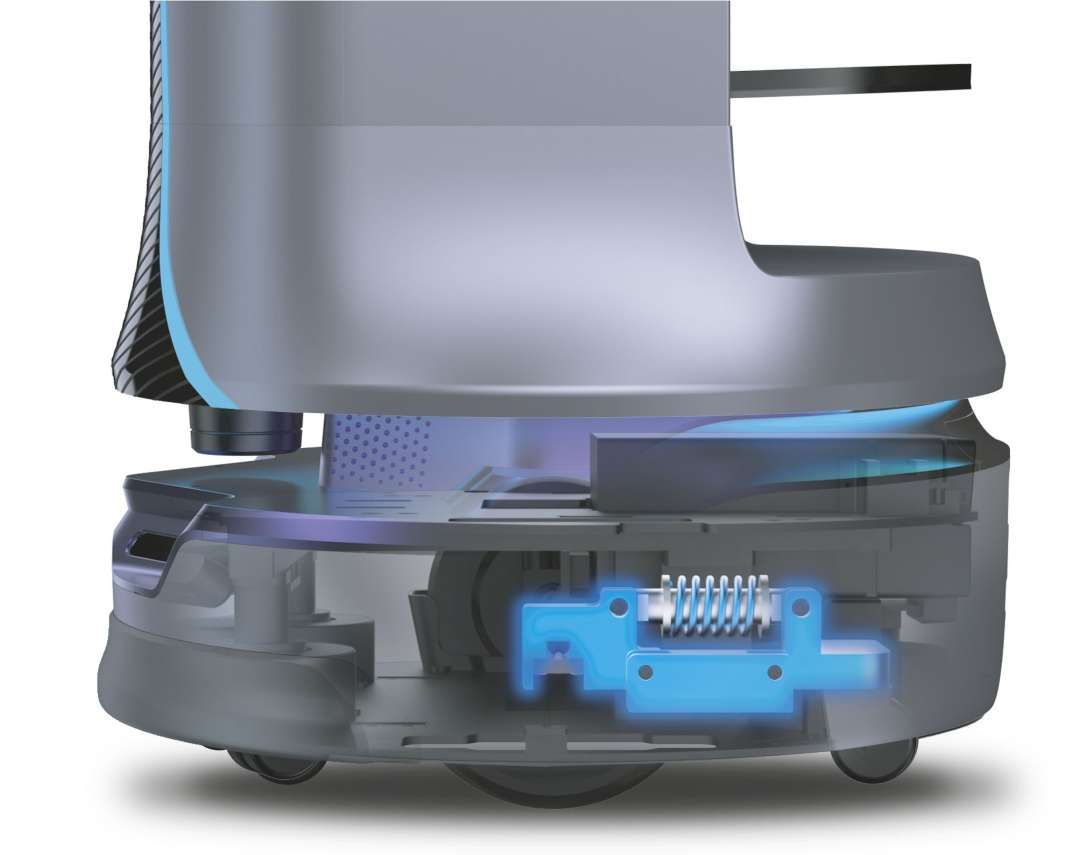 \n\n
\n\n\n Cabina interior resistente al agua: lavable, higi�nica, lista para la limpieza\n diaria\n
\n\n\n En cualquier entorno de hosteler�a o cl�nico, la higiene interior no es\n opcional. La cabina interior del HolaBot est� dise�ada para lavarse\n directamente � los l�quidos derramados desde las bandejas cargadas no penetran\n en la electr�nica sensible. Las alfombrillas de silicona de las bandejas\n resisten las manchas de aceite y pueden limpiarse con agua corriente. El\n mantenimiento semanal consiste en limpiar ruedas motrices, bandejas y\n superficies de sensores con un pa�o limpio � sin herramientas especializadas\n ni productos qu�micos.\n
\n\n\n La imagen siguiente ilustra la construcci�n resistente al agua del cuerpo\n superior del HolaBot: el impacto del agua se desv�a del compartimento\n interior, confirmando que la cabina est� dise�ada para soportar las\n condiciones h�medas habituales en los pasillos de cocina.\n
\n \n\n
\n\nEspecificaciones t�cnicas del PUDU HolaBot
\n\nDimensiones mec�nicas
\n| Dimensiones totales (L � An � Al) | \n542 � 534 � 1228 mm | \n
|---|---|
| Peso total | \n55 kg | \n
| Material general | \n\n ABS / Aleaci�n de aluminio de grado aeron�utico\n | \n
| Ancho m�nimo de paso | \n70 cm | \n
| Ancho m�nimo de giro | \n70 cm | \n
| \n Altura m�xima de obst�culo superable\n | \n7 mm | \n
| �ngulo m�ximo de inclinaci�n | \n5� | \n
Bandeja y capacidad de carga
\n| N�mero de bandejas | \n4 | \n
|---|---|
| Tama�o de bandeja | \n390 � 360 mm | \n
| \n Volumen del compartimento interior\n | \n120 L | \n
| \n Espaciado entre bandejas (de arriba a abajo)\n | \n216 mm / 184 mm / 184 mm / 184 mm | \n
| \n Carga por bandeja � superficie plana\n | \n15 kg | \n
| \n Carga por bandeja � cruzando obst�culo de 5 mm\n | \n10 kg | \n
| Capacidad de carga total | \n60 kg | \n
| Regulaci�n de altura de bandejas | \nS� � regulable en altura | \n
Tracci�n y locomoci�n
\n| Velocidad de crucero | \n0,5�1,2 m/s (ajustable) | \n
|---|---|
| Sistema de suspensi�n | \n\n Suspensi�n acoplada con muelle (nivelaci�n autom�tica)\n | \n
Navegaci�n y sensores
\n| M�todo de navegaci�n | \nSLAM l�ser + visual integrado | \n
|---|---|
| M�todos de cartograf�a | \n\n Marcador, L�ser, Marcador + L�ser (3 opciones)\n | \n
| Posici�n del LiDAR | \n0,21 m del suelo � FOV 220� | \n
| Posici�n de c�mara RGB-D superior | \n\n 1,0 m del suelo (Astra mini: H 58�, V 45� / HP60: H 74�, V 59�)\n | \n
| Posici�n de c�mara RGB-D inferior | \n\n 0,12 m del suelo (D430: H 85�, V 58� / Dabai: H 65�, V 45�)\n | \n
| Sensor de gestos por infrarrojos | \nS� � interacci�n Air Motion sin contacto | \n
Computaci�n e interfaz
\n| Sistema operativo | \nAndroid | \n
|---|---|
| Pantalla principal | \nLCD de 10,1" t�ctil | \n
| Pantalla de matriz de puntos | \nS� � expresiones de estado animadas | \n
| Micr�fono | \nKit de matriz circular de 6 micr�fonos | \n
| Potencia del altavoz | \n10 W � 2 est�reo | \n
| Franja luminosa | \nS� � indicador de estado RGB | \n
Llamada y programa
\n| M�todos de llamada | \n\n Smartwatch, Pudulink, Buscapersonas, NFC, Beeper (5 canales)\n | \n
|---|---|
| Modos de funcionamiento | \n\n Entrega, Recogida, Crucero, Directo (4 modos)\n | \n
| Destinos m�ximos en modo recogida | \n20 ubicaciones por tarea | \n
| Cruce autom�tico de puertas | \nS� | \n
| Gesti�n en la nube | \nServicio PUDU Cloud | \n
| Actualizaciones OTA | \nS� (bater�a m�nima del 20% requerida) | \n
Alimentaci�n y bater�a
\n| Tensi�n de funcionamiento | \nDC 23�29,4 V | \n
|---|---|
| Entrada de alimentaci�n | \nAC 100�240 V, 50/60 Hz | \n
| Salida del cargador | \n29,4 V, 8 A | \n
| Capacidad de la bater�a | \n25,6 Ah (extra�ble) | \n
| Tiempo de carga | \n4,5 h | \n
| Autonom�a de la bater�a | \n12 h (sin carga) | \n
Entorno de funcionamiento y almacenamiento
\n| Temperatura de funcionamiento | \n0 �C a 40 �C | \n
|---|---|
| Humedad de funcionamiento | \n? 85% HR | \n
| Temperatura de almacenamiento | \n-40 �C a 65 �C | \n
| Humedad de almacenamiento | \n? 85% HR | \n
\n\n
Contenido del paquete
\n- \n
- Robot de servicio PUDU HolaBot (montaje completo) \n
- Bater�a inteligente extra�ble de 25,6 Ah (instalada) \n
- Cable de carga y adaptador AC (29,4 V / 8 A) \n
- Gu�a de inicio r�pido y manual de operaci�n \n
\n\n
C�mo encender y poner en marcha el PUDU HolaBot
\n\n Este procedimiento describe la secuencia de arranque inicial del HolaBot,\n desde la verificaci�n de la bater�a hasta la asignaci�n de la primera tarea\n mediante la pantalla t�ctil Android.\n
\n\nPaso 1: Verificar el compartimento de la bater�a
\n\n Abra el compartimento de la bater�a y confirme que el interruptor de llave\n est� en la posici�n ON. Cierre el compartimento. Aseg�rese de que el nivel\n de bater�a est� por encima del 10% antes de continuar � el robot mostrar�\n un aviso de bater�a baja y restringir� la ejecuci�n de tareas por debajo\n de este umbral.\n
\nPaso 2: Posicionar el robot sobre un marcador
\n\n Desplace el HolaBot hasta una posici�n directamente debajo de cualquier\n marcador de suelo en la zona cartografiada. La inicializaci�n basada en\n marcadores proporciona al robot un punto de referencia conocido para la\n localizaci�n antes de que entre en funcionamiento la navegaci�n SLAM\n completa.\n
\nPaso 3: Encender el robot
\n\n Pulse y mantenga presionado el interruptor de encendido durante\n aproximadamente 1 segundo. La franja luminosa LED parpadear� y la pantalla\n LCD mostrar� en secuencia el logo de arranque, la animaci�n y el\n escritorio Android, lo que confirma un arranque correcto. La aplicaci�n\n Pudu se inicia autom�ticamente; si no lo hace, pulse su icono en el\n escritorio Android.\n
\nPaso 4: Seleccionar el modo de funcionamiento
\n\n En la interfaz principal, seleccione el modo de tarea requerido: Entrega,\n Recogida, Crucero o Directo. En el modo de entrega, asigne destinos a las\n bandejas pulsando cada una en pantalla y seleccionando el n�mero de mesa\n correspondiente, despu�s pulse "Ir." En el modo de recogida, seleccione\n hasta 20 destinos de recogida y pulse "Ir." El robot planificar�\n autom�ticamente la ruta �ptima.\n
\nPaso 5: Supervisar y pausar
\n\n Pulse la pantalla en cualquier momento para pausar el robot durante una\n tarea. En el modo crucero, el robot se reanuda autom�ticamente tras 20\n segundos si no se realiza ninguna otra acci�n; en todos los dem�s modos,\n se reanuda tras 10 segundos. Para devolver el robot a su posici�n de\n acoplamiento en cualquier momento, pulse la pantalla de pausa y seleccione\n "Volver."\n
\n\n\n
\n �Cu�l es la capacidad de carga m�xima del PUDU HolaBot?\n
\n\n El HolaBot admite 15 kg por bandeja en superficies planas, en cuatro\n bandejas, para una carga �til total de 60 kg. Al cruzar un umbral o un\n obst�culo de 5 mm, el l�mite por bandeja se reduce a 10 kg para proteger\n la carga y mantener la estabilidad.\n
\n�Cu�ntos modos de funcionamiento tiene el HolaBot?
\n\n El HolaBot dispone de cuatro modos de funcionamiento: Entrega (despacho\n a varias mesas con planificaci�n �ptima de ruta), Recogida (recogida en\n hasta 20 puntos y consolidaci�n en una estaci�n de retorno), Crucero\n (circuito por una ruta preestablecida con paradas temporizadas) y\n Directo (despacho a un �nico destino sin retorno autom�tico).\n
\n�Qu� tecnolog�a de navegaci�n utiliza el HolaBot?
\n\n El HolaBot utiliza posicionamiento SLAM l�ser y visual integrado,\n combinando un sensor L

, Magenta")


















 � Robot de Publicidad y Hostes")


