
- Disponibilidade: Em stock
- Código do produto: 10260-000013
- Peso bruto: 135.00
\n El PUDU T300 Elevator es un robot m�vil aut�nomo (AMR)\n industrial dise�ado para el transporte de materiales y la gesti�n de cargas\n pesadas en entornos de fabricaci�n y log�stica. Con una capacidad de carga de\n 300 kg, navegaci�n aut�noma mediante VSLAM+ y Laser-SLAM sin\n marcadores en el suelo, una autonom�a de hasta 12 horas sin carga y\n conexi�n nativa a ascensores de edificio mediante API IoT, el T300 sustituye a\n los transbordadores manuales y a los AGV tradicionales en una �nica plataforma\n desplegable.\n
\n\n| Carga m�xima | \n300 kg | \n
|---|---|
| Autonom�a de la bater�a | \n12 h (sin carga) / 6 h (carga m�xima) | \n
| Tecnolog�a de navegaci�n | \nVSLAM+ y Laser-SLAM (sin marcadores) | \n
| Certificaci�n de seguridad | \nISO 3691-4 | \n
\n La imagen siguiente muestra el T300 en su configuraci�n est�ndar,\n transportando una caja de cart�n de tama�o industrial � la realidad cotidiana\n de la log�stica aut�noma entre l�neas de producci�n y departamentos en una\n planta de fabricaci�n.\n
\n \n\n
\n\n\n Aplicaciones industriales: desde la entrega en l�nea hasta la log�stica de\n producto acabado\n
\n\n\n El T300 cubre cuatro fases de flujo de materiales que definen la log�stica\n interna moderna. La entrega en l�nea mantiene abastecidos los puestos\n de montaje sin operarios de reparto. El\n transporte de trabajo en curso mueve semifabricados entre c�lulas de\n producci�n. El traslado de WIP a producto acabado gestiona el paso de\n producci�n al almac�n de terminados. La\n entrega para inspecci�n de calidad\n env�a muestras a las estaciones de control de forma aut�noma, eliminando los\n �ltimos puntos de contacto manual en fabricaci�n de flujo continuo.\n
\n\n\n El diagrama siguiente mapea cada una de estas cuatro zonas de aplicaci�n en\n una planta de fabricaci�n t�pica, ilustrando c�mo una sola flota de T300 cubre\n la cadena log�stica interna completa desde la entrada de materias primas hasta\n la zona de expedici�n.\n
\n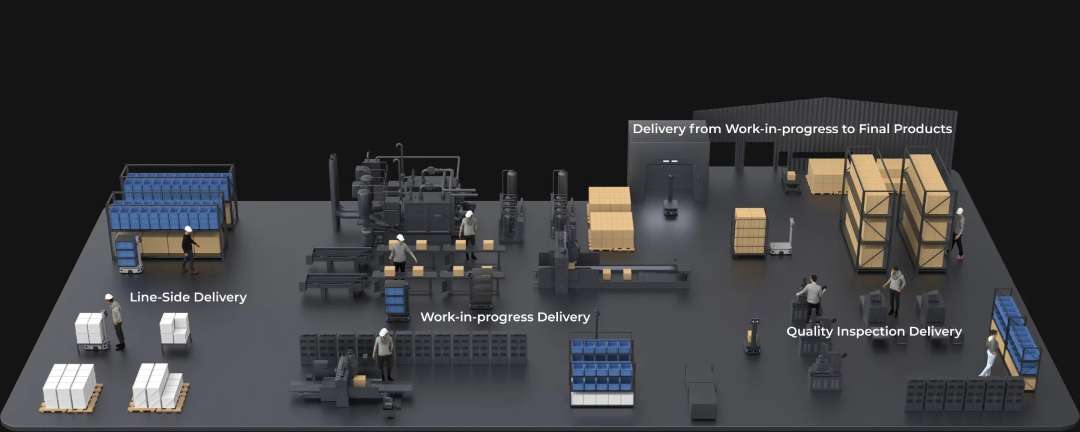 \n\n
\n\n\n Navegaci�n VSLAM+: despliegue un 70% m�s r�pido que los AGV tradicionales\n
\n\n\n Los AGV tradicionales exigen instalaci�n f�sica de gu�as: cintas magn�ticas,\n cuadr�culas de QR o cinta reflectante, que requieren d�as de instalaci�n y\n limitan al robot a rutas fijas. El T300 funciona como AMR puro: construye su\n propio mapa mediante la\n tecnolog�a propietaria VSLAM+ de PUDU, combinando odometr�a\n visual con fusi�n de nube de puntos Laser-SLAM. Sin marcadores en el suelo.\n Sin modificaciones estructurales. El robot cartograf�a, navega y se relocaliza\n en tiempo real.\n
\n\nEntornos de gran altura y gran escala
\n\n\n VSLAM+ opera con fiabilidad en instalaciones con techos de hasta 30 m,\n donde muchos sistemas AMR basados en landmarks no alcanzan. La capacidad de\n mapa llega a 200,000 m� por proyecto, suficiente para los centros de\n distribuci�n m�s grandes y complejos de fabricaci�n de m�ltiples naves. Cuando\n los trazados de producci�n cambian, las actualizaciones del mapa se completan\n en minutos, no en d�as.\n
\n\n\n La vista cenital siguiente muestra el T300 atravesando un pasillo de apenas\n 60 cm\n de anchura libre � el requisito m�nimo de v�a del robot �, demostrando el\n compacto perfil que permite el despliegue junto a estanter�as, maquinaria y\n pasillos peatonales existentes.\n
\n \n\n
\n\nSeguridad Omni-Sense 360�: certificado ISO 3691-4
\n\n\n El T300 cumple la norma ISO 3691-4 para veh�culos industriales automatizados,\n el mismo marco de certificaci�n aplicado a carretillas elevadoras aut�nomas y\n sistemas de transporte de f�brica. Tres capas de sensores trabajan\n simult�neamente: un barrido\n LiDAR 360� detecta obst�culos en el plano horizontal;\n c�maras de profundidad RGBD proporcionan conciencia espacial en tres\n dimensiones; y una c�mara frontal\n gestiona la identificaci�n de objetos en proximidad. Juntos crean zonas de\n detecci�n solapadas sin puntos ciegos.\n
\n\n\n El render siguiente muestra dos robots T300 operando junto a cintas\n transportadoras activas, con los haces de barrido LiDAR visualizados como\n conos azules � cada robot difunde continuamente su posici�n mientras calcula\n ajustes din�micos de trayectoria segura alrededor de objetos en movimiento y\n personal.\n
\n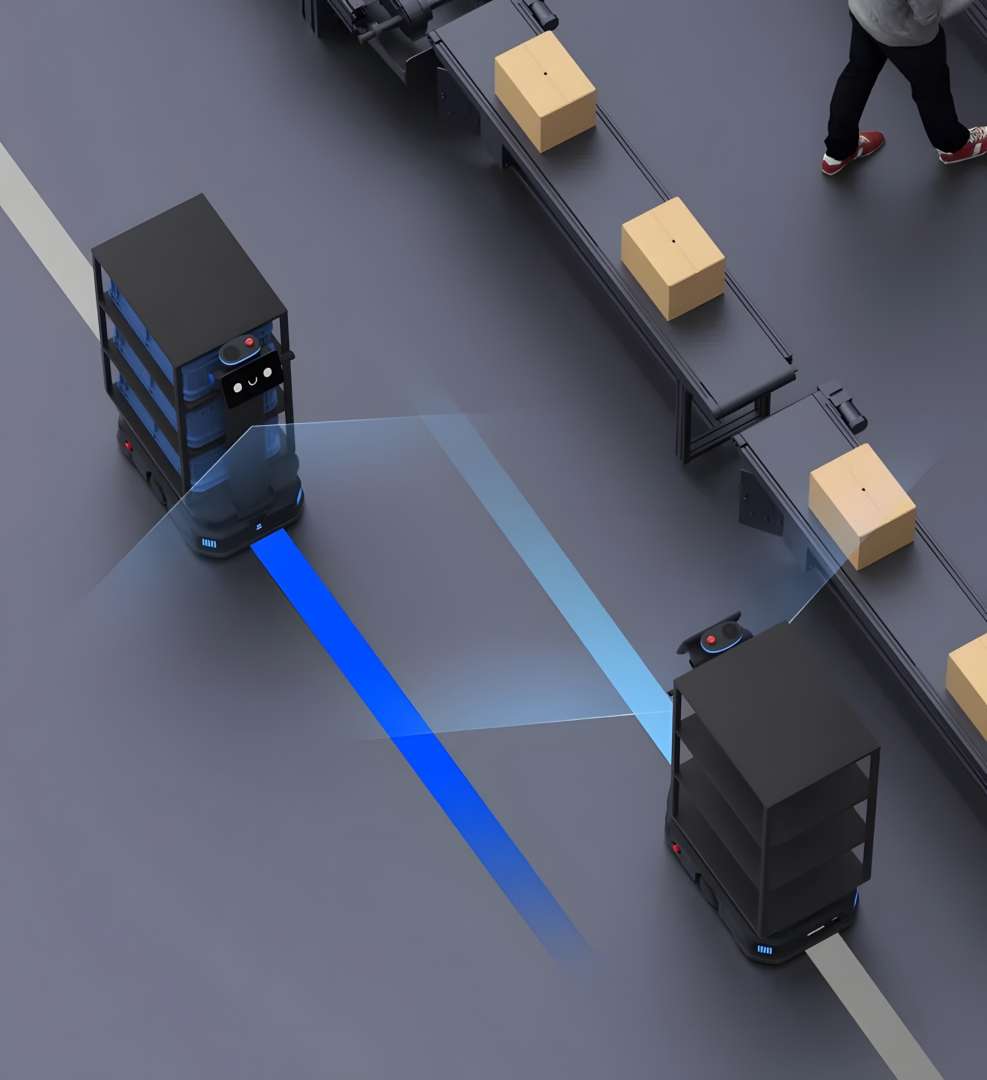 \n\n
\n\nModo seguimiento y modo asistencia manual
\n\n\n Cuando la autonom�a completa a�n no est� configurada para una zona, el T300\n ofrece dos modos de operaci�n semiaut�nomos. En el Modo Seguimiento, el\n robot rastrea a un operario designado mediante reconocimiento visual,\n manteniendo el espaciado de convoy mientras el trabajador lidera. Varios\n robots pueden hacer cola en secuencia ordenada, cada uno siguiendo el ritmo y\n la direcci�n del que va delante. En el Modo Asistencia Manual, el\n accionamiento el�ctrico proporciona ayuda cuando un operario empuja el robot\n manualmente, mientras el sistema VSLAM+ genera o refina simult�neamente el\n mapa del �rea.\n
\n\n\n La imagen siguiente muestra dos T300 en Modo Seguimiento rastreando a un\n operario con casco en una nave de almac�n abierta.\n
\n \n\n
\n\nCuatro configuraciones de accesorio
\n\n\n El chasis abierto superior del T300 est� dise�ado como base universal para\n portadores de carga modulares. Cuatro configuraciones cubren el espectro\n completo de tareas de transporte industrial.\n
\n\nModo est�ndar y modo estanter�a
\n\n\n El Modo Est�ndar monta una plataforma plana de gran superficie para\n cargas individuales voluminosas: cajas de cart�n, contenedores de herramientas\n y pal�s de materias primas hasta el l�mite de 300 kg. El\n Modo Estanter�a instala una estanter�a de varios niveles que transporta\n contenedores peque�os y medianos a m�ltiples destinos en un solo viaje. La\n imagen siguiente muestra el T300 cargado con tres niveles de bandejas azules\n de almacenamiento, cada una con destino a un puesto de trabajo diferente.\n
\n \n\n
\n\nModo elevaci�n (variante WTIDL1) y modo remolque
\n\n\n El Modo Elevaci�n, disponible en el modelo WTIDL1, permite\n operaciones de carga y descarga completamente automatizadas. El robot circula\n bajo un bastidor dotado de marcadores reflectantes, eleva hidr�ulicamente la\n carga hasta la altura de transporte y la entrega en el punto de descarga\n programado, sin intervenci�n humana en ning�n extremo. Los bastidores\n compatibles tienen longitudes de 600 mm a 1.200 mm y altura m�xima de\n 1.300 mm. El Modo Remolque conecta el T300 a portadores con\n ruedas existentes mediante acoplamiento mec�nico, permitiendo al robot tirar\n de jaulas, carros de alambre y bastidores de transporte de construcci�n\n personalizada sin nueva infraestructura. La imagen siguiente muestra el T300\n acoplado a una jaula de malla met�lica.\n
\n \n\n
\n\n\n Operaci�n 24/7: autonom�a de 12 horas, bater�a intercambiable y carga\n autom�tica\n
\n\n\n El T300 funciona 12 horas sin carga y 6 horas con carga m�xima,\n cubriendo un turno completo con una sola carga para la mayor�a de patrones de\n despliegue. La bater�a de 30 Ah de iones de litio es intercambiable sin\n herramientas: abra el compartimento, desconecte el conector de alimentaci�n e\n inserte una unidad cargada. El tiempo total de cambio es inferior a dos\n minutos con un operario formado, lo que permite operaci�n continua 24/7 con\n una sencilla rotaci�n de bater�as.\n
\n\n\n La imagen siguiente muestra a un operario en pleno cambio de bater�a de un\n T300, con el indicador de carga confirmando la bater�a de repuesto al 100%.\n
\n \n\n
\n\n\n Cuando la rotaci�n de bater�as no es necesaria, el T300 navega de forma\n aut�noma hacia su estaci�n de carga y se acopla sin asistencia del operario.\n La carga de 0% a 90% tarda aproximadamente 2 horas con el\n cargador est�ndar (entrada AC 100�240 V, salida 29,2 V / 15 A).\n
\n \n\n
\n\n\n Integraci�n IoT: control de ascensores, puertas electr�nicas y gesti�n de\n flota\n
\n\n\n La denominaci�n "Elevator" del T300 refleja su capacidad multiplanta nativa. A\n trav�s del m�dulo IoT integrado, el robot se comunica con los controladores de\n ascensores del edificio, llama al coche correspondiente, sube, selecciona la\n planta de destino y sale, todo de forma aut�noma. El mismo conjunto IoT\n gestiona el control de acceso por puerta electr�nica en zonas seguras,\n las notificaciones al personal mediante avisador y un\n altavoz Bluetooth para alertas de voz en el robot. La integraci�n\n mediante API de programas con PDUD Link (aplicaci�n m�vil) y sistemas de\n terceros est� soportada mediante una interfaz est�ndar.\n
\n\n\n La gesti�n de flota mediante el\n Sistema PUDU Scheduler coordina hasta 20 robots en un\n mismo entorno. El programador resuelve conflictos de tr�fico, genera desv�os\n alrededor de congestiones y redistribuye tareas din�micamente a medida que las\n condiciones cambian, sin coordinaci�n manual.\n
\n\n\n La imagen siguiente muestra en detalle el conjunto superior del T300: la torre\n del sensor LiDAR, la pantalla t�ctil de 10,1 pulgadas, el bot�n de env�o\n manual y el interruptor de parada de emergencia.\n
\n \n\n
\n\n\n Consejo t�cnico: Al cartografiar una nueva instalaci�n,\n realice el digitalização inicial VSLAM+ fuera de horas punta, con el m�nimo tr�fico\n peatonal y sin equipos en movimiento. La calidad del mapa escala directamente\n con la consistencia del entorno en el momento del digitalização: los objetos\n din�micos introducen caracter�sticas fantasma que degradan la precisi�n de\n relocalizaci�n bajo carga. Realice al menos dos pasadas completas en\n direcciones opuestas antes de guardar el mapa maestro.\n\n\n
Especificaciones t�cnicas del PUDU T300 Elevator
\n\nDimensiones mec�nicas
\n| Variantes de modelo | \nWTID01 (est�ndar) / WTIDL1 (con elevaci�n) | \n
|---|---|
| Dimensiones totales (A � An � P) | \n835 � 500 � 1350 mm | \n
| \n Dimensiones del chasis (A � An � P)\n | \n780 � 500 � 240 mm | \n
| Peso del equipo � WTID01 | \n65 kg | \n
| \n Peso del equipo � WTIDL1 (con elevaci�n)\n | \n81 kg | \n
| Pantalla | \nPantalla LCD t�ctil de 10,1 pulgadas | \n
| Sistema operativo | \nAndroid | \n
Rendimiento
\n| Capacidad de carga m�xima | \n300 kg | \n
|---|---|
| Velocidad de crucero | \n0,2�1,2 m/s (ajustable) | \n
| Paso de v�a m�nimo | \n60 cm | \n
| Altura m�xima de umbral superable | \n20 mm | \n
| \n Anchura m�xima de ranura superable\n | \n35 mm | \n
| Potencia del altavoz | \n10 W � 2 (est�reo) | \n
Navegaci�n y seguridad
\n| M�todos de navegaci�n | \nVisual-SLAM (VSLAM+) y Laser-SLAM | \n
|---|---|
| Sensores | \n\n LiDAR 360�, c�mara de profundidad RGBD, c�mara frontal, c�mara VSLAM\n | \n
| Norma de seguridad | \nISO 3691-4 | \n
| \n Superficie m�xima de cartografiado\n | \n200.000 m� | \n
| \n Altura m�xima de techo para VSLAM+\n | \n30 m | \n
| \n Capacidad de flota (PUDU Scheduler)\n | \nHasta 20 robots por entorno | \n
Bater�a y alimentaci�n
\n| Tensi�n de funcionamiento | \nDC 20,8�29,2 V | \n
|---|---|
| Capacidad de la bater�a | \n30 Ah (litio intercambiable) | \n
| Autonom�a � sin carga | \n12 h | \n
| Autonom�a � carga m�xima | \n6 h | \n
| Tiempo de carga (0% a 90%) | \n~2 h | \n
| Entrada del cargador | \nAC 100�240 V, 50/60 Hz | \n
| Salida del cargador | \n29,2 V, 15 A | \n
Interfaces de expansi�n externa
\n| Puerto de alimentaci�n | \n24 V DC, corriente m�xima de salida 2,5 A | \n
|---|---|
| USB | \n\n USB 2.0 � comunicaci�n de datos con dispositivos externos\n | \n
| LED IO | \n\n Comunicaci�n de se�al para accesorios opcionales externos\n | \n
| Ranura para tarjeta SIM | \nNano SIM | \n
| Puerto OTG | \nDepuraci�n de dispositivos | \n
Condiciones ambientales
\n| Temperatura de trabajo | \n0 �C a 40 �C | \n
|---|---|
| Humedad de trabajo | \n? 85% HR | \n
| Temperatura de almacenamiento | \n-20 �C a 60 �C | \n
| Altitud m�xima de operaci�n | \n< 2000 m | \n
| Requisitos de superficie | \nInteriores, planos y lisos | \n
\n\n
Contenido del paquete
\n- \n
- \n Robot m�vil aut�nomo PUDU T300 Elevator (configuraci�n WTIDL1 con mecanismo\n de elevaci�n)\n \n
- Bater�a de litio intercambiable de 30 Ah (preinstalada) \n
- Cargador AC (entrada 100�240 V / salida 29,2 V, 15 A) \n
- Manual de usuario y certificado de calidad \n
\n\n
\n C�mo lanzar la primera tarea de entrega aut�noma en el PUDU T300 Elevator\n
\n\n Este procedimiento describe c�mo cartografiar una nueva zona de despliegue y\n ejecutar el primer ciclo de entrega automatizada tras la configuraci�n\n inicial del PUDU T300 Elevator.\n
\n\nPaso 1: Encender e inicializar
\n\n Compruebe que la bater�a de 30 Ah est� totalmente cargada y fijada en el\n compartimento. Mantenga pulsado el interruptor de encendido principal\n durante 3 segundos. El indicador luminoso se pone azul y la pantalla LCD\n muestra la pantalla de inicio, confirmando el arranque correcto.\n
\n\n Paso 2: Crear el mapa de la zona en Modo Asistencia Manual\n
\n\n Active el Modo Asistencia Manual en la pantalla t�ctil. Empuje el robot\n por toda la zona de entrega a paso de marcha. El sistema VSLAM+ construye\n el mapa del entorno en tiempo real. Complete al menos dos pasadas\n completas en direcciones opuestas para mejorar la densidad y cobertura de\n caracter�sticas del mapa.\n
\nPaso 3: Guardar el mapa y definir puntos clave
\n\n Navegue a Configuraci�n ? Ajustes de Mapa en la pantalla t�ctil. Guarde el\n mapa completado. Marque los destinos de entrega, el punto de espera (base)\n y la ubicaci�n de la estaci�n de carga en el mapa. Para despliegues en\n Modo Elevaci�n, registre tambi�n las dimensiones de los bastidores en\n Funciones del Robot ? Ajustes de Elevaci�n ? M�todo de Recogida.\n
\nPaso 4: Configurar la primera tarea de entrega
\n\n En la pantalla de inicio, seleccione Modo Entrega. Cargue los materiales\n en el robot o en el accesorio. En la pantalla de tareas, seleccione uno o\n varios puntos de destino de la lista. El robot planifica autom�ticamente\n la ruta �ptima de m�ltiples paradas.\n
\nPaso 5: Despachar y supervisar
\n\n Pulse Partir para iniciar la tarea. El robot navega de forma aut�noma a\n todos los destinos, se detiene en cada punto para la recogida o entrega y\n regresa al punto de espera al finalizar. Supervise el progreso en la\n pantalla LCD o mediante la aplicaci�n m�vil PDUD Link. Para pausar en\n cualquier momento, toque la pantalla; vuelva a tocar para reanudar.\n
\n\n\n
�Cu�l es la carga m�xima del PUDU T300 Elevator?
\n\n El PUDU T300 Elevator soporta una carga m�xima de 300 kg. Esto se aplica\n a todas las configuraciones de accesorio: plataforma est�ndar,\n estanter�a m�ltiple, mecanismo de elevaci�n y remolque. La autonom�a con\n carga m�xima es de 6 horas con una sola carga de la bater�a de 30 Ah.\n
\n\n �El PUDU T300 Elevator soporta operaci�n multiplanta a trav�s de\n ascensores del edificio?\n
\n\n S�. El T300 Elevator incluye un m�dulo de control de ascensores IoT\n integrado que se comunica con los sistemas de ascensores de edificios\n compatibles mediante API de programas. El robot llama aut�nomamente a un\n ascensor, sube, selecciona la planta de destino y sale, permitiendo el\n transporte de materiales multiplanta completamente desatendido sin\n operarios en ninguno de los extremos.\n
\n\n �Con qu� rapidez se puede desplegar el PUDU T300 Elevator en una nueva\n instalaci�n?\n
\n\n El tiempo de despliegue se reduce en aproximadamente un 70% en\n comparaci�n con los sistemas AGV tradicionales. No se requieren\n marcadores en el suelo, cintas magn�ticas ni modificaciones\n estructurales. Un operario conduce el robot por la zona objetivo en Modo\n Asistencia Manual para generar el mapa VSLAM+, marca los puntos de\n entrega y la estaci�n de carga, y el robot est� listo para operar de\n forma aut�noma, normalmente en un solo turno.\n
\n\n �Pueden trabajar juntos varios robots PUDU T300 en el mismo espacio?\n
\n\n S�. El Sistema PUDU Scheduler coordina flotas de hasta 20 robots T300 en\n un �nico entorno. El programador gestiona la resoluci�n de conflictos de\n tr�fico, el desv�o din�mico alrededor de congestiones y la\n redistribuci�n de tareas en tiempo real. Los robots se detectan\n mutuamente y ceden el paso seg�n co























 � Robot de Publicidad y Hostes")

