")
")
")



- Disponibilidade: Em stock
- Código do produto: 10110-000068
- Peso bruto: 110.00
\n El PUDU CC1 Green es un robot limpiador comercial aut�nomo\n cuatro en uno dise�ado para espacios interiores peque�os y medianos �\n oficinas, hoteles, superficies comerciales, hospitales y estaciones de\n transporte p�blico. Combina fregado, barrido, aspiraci�n y limpieza h�meda en\n un �nico equipo de 629 � 552 � 695 mm y 75 kg, con certificaci�n\n IPX4. El sistema de navegaci�n dual PUDU SLAM fusiona\n posicionamiento visual y l�ser, mientras que una bater�a de\n 50 Ah proporciona hasta 9 horas de autonom�a en modo silencioso.\n Con una potencia de succi�n de hasta 17.000 Pa y un rendimiento de\n limpieza de 700�1.000 m�/h, el CC1 puede reemplazar turnos completos de\n limpieza manual sin supervisi�n continua.\n
\n\n\n The video below shows the PUDU CC1 operating across its four cleaning modes in\n typical commercial deployment scenarios.\n
\n| Potencia m�xima de succi�n | \n17.000 Pa | \n
|---|---|
| Rendimiento de limpieza | \n700�1.000 m�/h | \n
| \n Dep�sito de agua limpia / Dep�sito de residuos\n | \n15 L / 15 L | \n
| \n Autonom�a � Modo limpieza h�meda silenciosa\n | \nhasta 9 h | \n
\n La imagen siguiente muestra el PUDU CC1 Green en su\n configuraci�n est�ndar de despliegue � la caracter�stica carcasa blanca y\n verde lima con la pantalla LCD de 10,1 pulgadas y la plataforma de limpieza\n modular inferior.\n
\n \n\n
\n\n\n Cuatro Modos de Limpieza en una Sola Plataforma: Fregado, Barrido, Aspiraci�n,\n Trapeado\n
\n\n\n Un �nico equipo CC1 cubre cuatro flujos de mantenimiento de suelos distintos,\n consolidando lo que de otro modo requerir�a varias m�quinas y turnos de\n operarios. Cada modo se activa configurando el m�dulo de limpieza trasero y\n seleccionando el ajuste correspondiente en la pantalla t�ctil � sin necesidad\n de herramientas para cambiar m�dulos.\n
\n\n\n El v�deo siguiente muestra los cuatro modos de limpieza en acci�n en\n instalaciones comerciales reales.\n
\nModo Fregado � Limpieza Profunda de Suelos Duros
\n\n El modo de fregado despliega el cepillo de lavado y la escobilla para el\n tratamiento intensivo de suelos duros. La escobilla de 63 cm recupera\n continuamente el agua sucia a 17.000 Pa de succi�n. Medida a velocidad\n baja, desde el 100% hasta el 10% de bater�a, la autonom�a en fregado alcanza\n las 5 horas por ciclo.\n
\n\nModo Barrido � Tres Funciones en un Solo Paso
\n\n La configuraci�n de barrido combina el cepillo lateral, el rodillo de barrido\n y el accesorio de mopa-aspiraci�n, completando la recogida de residuos, la\n aspiraci�n y el trapeado h�medo simult�neamente. La autonom�a en este modo es\n de 5 horas. Una cubierta de pó de 2,5 L recoge los residuos\n s�lidos entre vaciados.\n
\n\nModo Aspiraci�n de Moqueta � Alfombras de Pelo Corto
\n\n Con el accesorio de aspiraci�n de moqueta instalado (vendido por separado), el\n CC1 pasa a la limpieza de superficies blandas. La anchura de la bico de\n 51,5 cm cubre pasillos est�ndar en un solo paso, y la altura m�xima\n superable de 20 mm garantiza transiciones fluidas de suelo duro a\n moqueta. La autonom�a en este modo es de 4 horas.\n
\n\nModo Limpieza H�meda Silenciosa � Entornos Ac�sticamente Sensibles
\n\n El modo silencioso desactiva el soplador, reduciendo el ruido de\n funcionamiento muy por debajo del umbral est�ndar de < 70 dB(A). La\n autonom�a extendida de 9 horas hace este modo id�neo para la limpieza\n nocturna de salas hospitalarias, vest�bulos de hotel en horas tard�as y\n entornos de oficina o biblioteca con restricciones ac�sticas estrictas.\n
\n\n\n La vista trasera siguiente muestra la plataforma de limpieza modular del CC1\n en configuraci�n de fregado, con la escobilla, los cepillos principales de\n lavado y el cepillo lateral bien visibles.\n
\n \n\n
\n\n\n Navegaci�n PUDU SLAM: Posicionamiento Visual + L�ser para Entornos Complejos\n
\n\n\n El CC1 funciona con el sistema de posicionamiento propietario\n PUDU SLAM, que fusiona SLAM visual (sensor RGBD, c�mara RGB,\n c�mara superior) con SLAM l�ser (LiDAR 2D y LiDAR de estado s�lido). Esta\n arquitectura de doble modo gestiona superficies de m�rmol reflectantes,\n mamparas de vidrio y pasillos estrechos que confunden a los sistemas de sensor\n �nico. El robot construye un mapa preciso en su primer recorrido manual y lo\n va refinando en las sesiones sucesivas.\n
\n\n\n La distancia m�nima de paso es de 70 cm y el ancho m�nimo de giro es de\n 88 cm. Una vez establecido el mapa, las zonas de limpieza, las paredes\n virtuales y las �reas restringidas se configuran directamente en la aplicaci�n\n m�vil � sin necesidad de cinta adhesiva ni barreras f�sicas.\n
\n\n\n Consejo t�cnico: Al desplegar el PUDU CC1 en una instalaci�n\n nueva, construya siempre el mapa inicial usando el modo de empuje manual con\n el asa levantada antes de programar la primera tarea autom�tica. Recorrer toda\n el �rea de limpieza a baja velocidad permite al sistema SLAM registrar cada\n obst�culo, superficie de vidrio y rinc�n estrecho que el mapeo autom�tico de\n primera pasada podr�a pasar por alto. Un mapa inicial s�lido reduce\n significativamente la frecuencia de interrupciones durante la primera semana\n de operaci�n aut�noma.\n\n\n
\n El diagrama siguiente ilustra el sistema PUDU SLAM en funcionamiento � el\n robot proyectando su cono de doble sensor para localizaci�n simult�nea y\n actualizaci�n del mapa en tiempo real sobre un suelo comercial de grandes\n dimensiones.\n
\n \n\n
\n\n\n Succi�n de 17.000 Pa � Cobertura de Extremo a Extremo con Separaci�n a Pared\n < 2 cm\n
\n\n\n La succi�n m�xima de 17.000 Pa act�a en el canal de recuperaci�n de la\n escobilla � el par�metro que determina con qu� completitud se elimina el agua\n sucia tras el fregado. El cepillo lateral extiende la cobertura de barrido\n hasta 50 cm, dirigiendo los residuos hacia el paso principal en lugar\n de redistribuirlos hacia los lados. La geometr�a del borde de la escobilla\n logra una separaci�n de < 2 cm respecto a paredes y esquinas,\n cubriendo los per�metros del suelo a tasas inalcanzables para las m�quinas\n comerciales de trayectoria recta. El ancho total de recuperaci�n h�meda de la\n escobilla es de 63 cm.\n
\n\n\n La imagen siguiente muestra en secci�n transversal el mecanismo de succi�n de\n 17.000 Pa, con el canal de flujo de aire a alta presi�n a trav�s de la\n plataforma de limpieza durante la recuperaci�n de agua sucia.\n
\n \n\n
\n\n\n Asa Extensible para el Operario: Construcci�n de Mapa, Control Manual y Parada\n de Emergencia\n
\n\n\n El asa de direcci�n retr�ctil cumple tres funciones diferenciadas. Levantada,\n permite al operario empujar el robot manualmente para la construcci�n inicial\n del mapa o para atender derrames imprevistos durante el turno. Bajada, se\n pliega al ras del cuerpo para la navegaci�n aut�noma bajo la restricci�n de\n altura m�nima de paso de 76 cm. La pantalla montada en el asa muestra\n datos de la tarea en tiempo real � velocidad del cepillo, nivel de succi�n,\n caudal de agua � todos ajustables durante la operaci�n manual.\n
\n\n\n La imagen siguiente muestra el asa en su posici�n completamente levantada, con\n la pantalla LCD orientada hacia el operario a una altura de trabajo c�moda\n durante el fregado manual.\n
\n \n\n
\n\n\n Ecosistema de Base Aut�noma: Carga, Reposici�n de Agua y Vaciado � Sin Obras\n de Fontaner�a\n
\n\n\n Combinado con la base de acoplamiento opcional de\n PUDU (vendida por separado), el CC1 completa ciclos de\n limpieza aut�nomos completos sin intervenci�n manual. Cuando la bater�a cae\n por debajo del umbral, el robot regresa autom�ticamente a la base, se recarga\n en menos de 3 horas, repone el dep�sito de agua limpia de 15 L y\n vac�a el dep�sito de residuos � todo ello sin modificaciones de fontaner�a en\n el edificio. Para instalaciones donde las conexiones fijas de pared no son\n viables, la Estaci�n de Agua M�vil PUDU (vendida por\n separado) ofrece gesti�n de agua port�til con la misma capacidad de llenado y\n vaciado autom�tico.\n
\n\n\n La funci�n de reanudaci�n de punto de interrupci�n garantiza que el\n regreso a la base por bater�a baja no suponga perder el trabajo ya realizado.\n El robot guarda su posici�n exacta en la ruta de limpieza y la reanuda desde\n ese mismo punto tras la recarga � sin zonas omitidas ni limpiadas dos veces.\n
\n\n\n La ilustraci�n siguiente muestra el ecosistema completo del PUDU CC1: el robot\n de limpieza (izquierda), la base de acoplamiento montada en pared (centro) y\n la estaci�n de agua m�vil (derecha).\n
\n \n\n
\n\n\n El panel frontal de la base de acoplamiento, visible a continuaci�n, integra\n el marcador de posicionamiento visual (m�dulo superior) y los conectores de\n interfaz agua-energ�a (bloque central), que el robot localiza de forma\n aut�noma mediante su sistema de c�mara incorporado.\n
\n \n\n
\n\n\n Control por Aplicaci�n en Tiempo Real e Informes de Limpieza Digital\n Automatizados\n
\n\n\n El sistema operativo Android se empareja con la aplicaci�n m�vil de PUDU a\n trav�s de 4G, WiFi y Bluetooth para la gesti�n remota de tareas, edici�n de\n mapas y supervisi�n de flotas multirrobot. Los paneles en directo muestran\n nivel de bater�a, volumen de agua limpia, volumen de agua residual y progreso\n de la tarea activa para cada CC1 en red simult�neamente. Los par�metros de\n limpieza � velocidad del cepillo, intensidad de succi�n, caudal de agua � son\n ajustables en tiempo real desde la aplicaci�n o directamente en la pantalla\n t�ctil del robot.\n
\n\n\n La interfaz de la aplicaci�n m�vil siguiente muestra cinco vistas simult�neas:\n control de tarea activa con pausa y cancelaci�n, lista de robots de la flota\n con estado por unidad, panel en tiempo real con indicadores de dep�sito y\n bater�a, detalle de mapa interactivo con zonas de limpieza y paredes\n virtuales, y selecci�n de m�ltiples mapas para instalaciones con varios planos\n de planta.\n
\n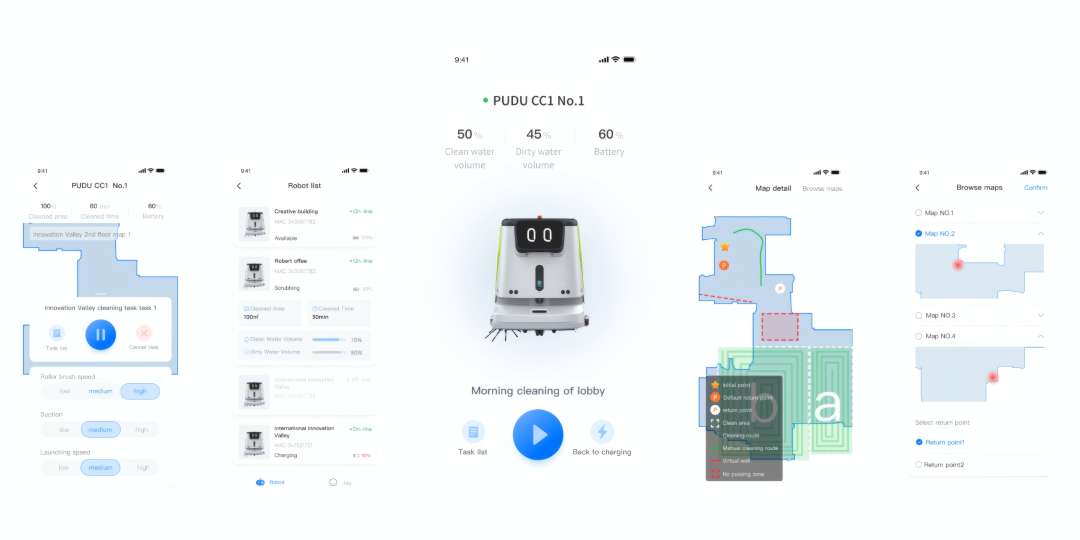 \n\n
\n\n\n M�s all� del control operativo, el CC1 genera informes de limpieza diarios\n automatizados. El panel mostrado a continuaci�n refleja la producci�n\n acumulada de una sola unidad: 33.723 m� limpiados en 50 horas de\n funcionamiento, con un gr�fico de tendencia de �rea diaria y un mapa de calor\n que identifica las zonas limpiadas cuatro o m�s veces al d�a � una entrada\n directa para la planificaci�n de mantenimiento y la gesti�n de recursos.\n
\n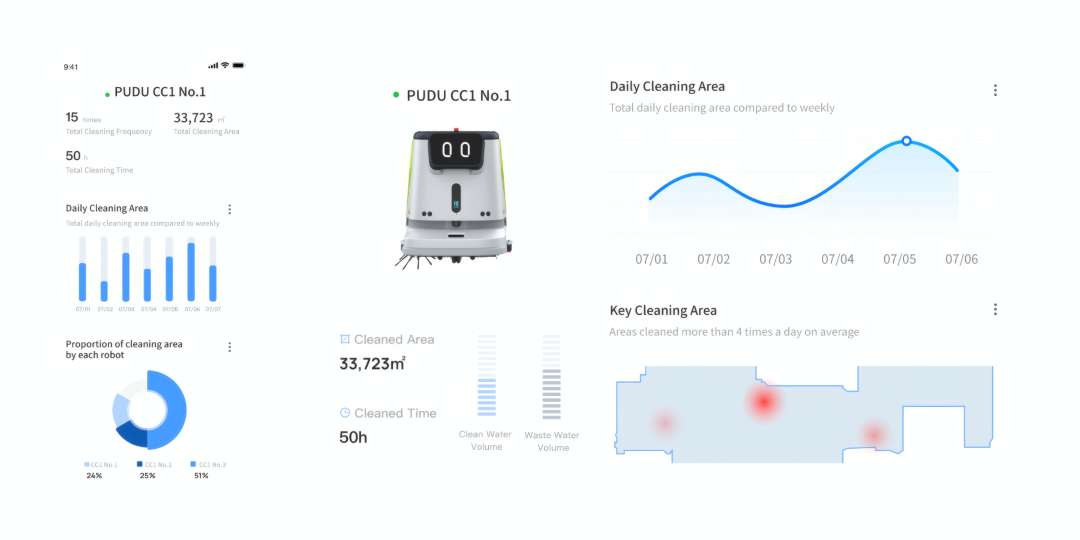 \n\n
\n\nEspecificaciones t�cnicas del PUDU CC1 Green
\n\n\n La vista isom�trica siguiente proporciona una referencia f�sica de la forma\n general del CC1 y la disposici�n de sus m�dulos de limpieza, como pre�mbulo\n a las tablas de especificaciones num�ricas completas.\n
\n \n\n
\n\n Modelo y caracter�sticas generales
\n| Modelo | \nCCBC01 | \n
|---|---|
| Material de la carcasa | \nPC+ABS | \n
| Pantalla | \nLCD de 10,1 pulgadas | \n
| Sistema operativo | \nAndroid | \n
| Grado de protecci�n | \nIPX4 | \n
| Modos de limpieza | \n\n Fregado; Barrido + Aspiraci�n + Trapeado; Aspiraci�n de moqueta;\n Limpieza h�meda silenciosa\n | \n
Dimensiones y peso
\n| Dimensiones del robot (L � A � H) | \n629 � 552 � 695 mm | \n
|---|---|
| Peso | \n75 kg | \n
Rendimiento de limpieza
\n| Potencia m�xima de succi�n | \n17.000 Pa | \n
|---|---|
| Rendimiento de limpieza | \n700�1.000 m�/h | \n
| Ruido de funcionamiento | \n< 70 dB(A) | \n
| Capacidad de la tolva de pó | \n2,5 L | \n
Anchura de limpieza
\n| \n Anchura de limpieza con cepillo lateral (m�x.)\n | \n50 cm | \n
|---|---|
| \n Anchura escobilla / accesorio mopa-aspiraci�n\n | \n63 cm | \n
| \n Anchura bico aspiraci�n moqueta (accesorio opcional)\n | \n51,5 cm | \n
| Separaci�n borde-pared | \n< 2 cm | \n
Navegaci�n y movilidad
\n| M�todo de navegaci�n | \n\n Posicionamiento integrado LiDAR y SLAM visual (SLAM visual + SLAM\n l�ser)\n | \n
|---|---|
| Velocidad de crucero | \n0,2�1,2 m/s | \n
| �ngulo m�ximo de subida | \n8� | \n
| Altura m�xima superable | \n20 mm | \n
| Hueco m�ximo superable | \n35 mm | \n
| Anchura m�nima de paso | \n70 cm | \n
| Anchura m�nima de giro | \n88 cm | \n
| Altura m�nima de paso | \n76 cm | \n
| Modo de operaci�n | \nManual / Autom�tico / Programado | \n
Sistema de agua
\n| \n Capacidad del dep�sito de agua limpia\n | \n15 L | \n
|---|---|
| \n Capacidad del dep�sito de recuperaci�n (residuos)\n | \n15 L | \n
| \n Reposici�n y vaciado autom�tico de agua\n | \n\n Compatible (requiere base de acoplamiento � vendida por separado)\n | \n
Bater�a y alimentaci�n
\n| Capacidad de la bater�a | \n50 Ah | \n
|---|---|
| Tiempo de carga | \n< 3 h | \n
| Autonom�a � Modo Fregado | \n5 h | \n
| \n Autonom�a � Barrido + Aspiraci�n + Trapeado\n | \n5 h | \n
| \n Autonom�a � Modo Aspiraci�n de Moqueta\n | \n4 h | \n
| \n Autonom�a � Modo Limpieza H�meda Silenciosa\n | \n9 h | \n
| Tensi�n de funcionamiento | \nDC 23 V�29,2 V | \n
| Entrada de alimentaci�n | \nAC 100 V�240 V, 50/60 Hz | \n
| Salida de alimentaci�n | \n29,2 V / 15 A | \n
| Carga autom�tica | \n\n Compatible (requiere base de carga o acoplamiento � vendida por\n separado)\n | \n
Sistema de sensores
\n| LiDAR | \nLiDAR 2D + LiDAR de estado s�lido | \n
|---|---|
| C�maras | \nSensor RGBD, c�mara RGB, c�mara superior | \n
| Radar ultras�nico | \nS� | \n
Conectividad e interfaz
\n| Comunicaci�n | \n4G, WiFi, Bluetooth; LoRa (opcional) | \n
|---|---|
| Aplicaci�n m�vil | \nCompatible | \n
�mbito de aplicaci�n y condiciones ambientales
\n| Tipos de suelo compatibles | \n\n Terrazo, m�rmol, azulejos, resina epoxi, piedra arenisca, piedra\n artificial, moqueta de pelo corto\n | \n
|---|---|
| Temperatura de funcionamiento | \n1 �C a 40 �C | \n
| Temperatura de almacenamiento | \n-20 �C a 60 �C | \n
| Humedad relativa de trabajo | \n? 85% HR | \n
| Altitud de trabajo | \n< 2.000 m | \n
| Escenarios t�picos de aplicaci�n | \n\n Edificios de oficinas, hoteles, comercios, hospitales, educaci�n,\n hosteler�a, fabricaci�n, transporte p�blico\n | \n
\n\n
Contenido del paquete
\n- \n
- Robot limpiador PUDU CC1 Green (montaje est�ndar) \n
- Cepillo lateral \n
- Rodillo de barrido \n
- Accesorio mopa-aspiraci�n (Modo Barrido) \n
- Escobilla y cepillo de lavado (Modo Fregado) \n
- Cabezal de mopa (Modo Silencioso) \n
- Bater�a de litio de 50 Ah (instalada) \n
- Adaptador de carga AC 100�240 V (29,2 V / 15 A) \n
- Gu�a de inicio r�pido \n
")
")



















 � Robot de Publicidad y Hostes")

