
- Disponibilidade: Em stock
- Código do produto: 10311-000002
- Peso bruto: 240.00
El PUDU T600 Underride es un robot m�vil aut�nomo (AMR) dise�ado para el transporte de cargas pesadas en instalaciones log�sticas industriales, con un chasis de 255 mm de altura que se desplaza directamente bajo las estanter�as de almac�n sin necesidad de modificaciones estructurales. Con una capacidad de carga de 600 kg, navegaci�n LiDAR SLAM y un pasillo m�nimo requerido de 65 cm, el T600 Underride automatiza completamente el transporte interno de materiales � integr�ndose con ascensores, puertas autom�ticas y sistemas de gesti�n de flotas mediante el protocolo VDA5050.
\n\n| Carga m�xima | \n600 kg (1322,77 lbs) | \n
|---|---|
| Altura del chasis | \n255 mm | \n
| Pasillo m�nimo | \n65 cm | \n
| Autonom�a de bater�a | \n12 h (sin carga) / 6 h (carga m�xima) | \n
Vea la serie PUDU T600 en acci�n en un entorno industrial real � ambas configuraciones (Standard y Underride) navegando de forma aut�noma, acopl�ndose a estanter�as y coordinando la log�stica entre plantas.
\n\nAmbas variantes de la plataforma T600 � Standard y Underride � comparten la misma base de chasis con clasificaci�n de 600 kg, ofreciendo a los responsables log�sticos la posibilidad de elegir el modelo de despliegue que mejor se adapta a su infraestructura de almacenamiento sin sacrificar capacidad de carga.
\n\n \n\n
\n\nChasis de Bajo Perfil Dise�ado para Circular Bajo las Estanter�as
\n\nLa caracter�stica arquitect�nica diferenciadora del T600 Underride es su altura de tan solo 255 mm. Mientras que los AMR convencionales requieren plataformas de carga elevadas o equipos adicionales de manipulaci�n, el T600 Underride se desliza directamente bajo las estructuras de estanter�a existentes, eleva desde abajo y transporta el conjunto completo de forma aut�noma. Sin modificaciones en las instalaciones. Sin cambios en las estanter�as. Las dimensiones de chasis de 845 � 500 mm est�n optimizadas para las huellas de estanter�a est�ndar habituales en los centros de distribuci�n europeos.
\n\nEste dise�o de tipo underride elimina un paso completo de manipulaci�n del flujo de trabajo. El robot se convierte en la fuerza motriz de la propia estanter�a � una soluci�n estructuralmente limpia y escalable para la automatizaci�n de mercanc�a al operario en alta densidad.
\n\n \n\n
\n\nReconocimiento de Grupos de Estanter�as � Recogida y Colocaci�n Aut�noma de Precisi�n
\n\nLa navegaci�n sub-estanter�a exige m�s que un simple mapeado LiDAR: el robot debe identificar la posici�n de destino correcta dentro de un grupo de estanter�as id�nticas, acoplarse con precisi�n y partir sin da�os por contacto. Los algoritmos de percepci�n del T600 Underride gestionan estos tres aspectos. Se pueden configurar dos estrategias de llegada al punto de acoplamiento:
\n\n- \n
- Desplazamiento en marcha atr�s: el robot retrocede hasta el punto de parada designado � maximiza la precisi�n de acoplamiento y la repetibilidad de alineaci�n \n
- Llegada directa: el robot avanza hasta la posici�n de destino y ajusta su orientaci�n in situ � m�s r�pido para distribuciones de planta abiertas \n
Los integradores de sistemas pueden asignar el modo de llegada por grupo de estanter�as en funci�n de la geometr�a del pasillo, reservando la estrategia de mayor precisi�n para los conjuntos de estanter�as densas donde la holgura de contacto es m�nima.
\n\nLa siguiente secuencia muestra unidades T600 Underride acopl�ndose bajo estanter�as de almac�n cargadas y partiendo hacia sus destinos � ilustrando tanto la holgura bajo estanter�a como la precisi�n del posicionamiento aut�nomo.
\n\n \n\n
\n\nNavegaci�n LiDAR SLAM en Pasillos de Hasta 65 cm de Ancho
\n\nEl T600 Underride utiliza exclusivamente LiDAR SLAM (Localizaci�n y Cartograf�a Simult�neas por L�ser) como m�todo de navegaci�n � sin c�maras de SLAM visual, sin c�digos QR en el techo, sin marcadores en el suelo. Esto tiene una implicaci�n pr�ctica relevante: LiDAR SLAM construye y actualiza continuamente un mapa geom�trico del entorno, tolerando cambios din�micos como estanter�as reposicionadas o bloqueos temporales de pasillo sin necesidad de un remapeo completo. El despliegue se adapta a los cambios de distribuci�n de producci�n en minutos, no en d�as.
\n\nEl pasillo m�nimo de 65 cm permite al T600 Underride operar en configuraciones de pasillo donde la mayor�a de los AMR competidores no pueden acceder. Con un ancho de chasis de 500 mm, el robot navega con holgura suficiente incluso cuando la carga puede extenderse ligeramente m�s all� de la huella del chasis.
\n\nEn esta imagen, varias unidades T600 Underride transportan cajas de almacenamiento de pl�stico por un pasillo estrecho de almac�n � una configuraci�n real que muestra la densidad de tr�fico de pasillo que el sistema de programaci�n inteligente est� dise�ado para gestionar.
\n\n \n\n
\n\nEstrategia Inteligente de Tr�fico en Pasillos Estrechos
\n\nCuando una flota de unidades T600 comparte instalaciones, el rendimiento del pasillo se convierte en el cuello de botella cr�tico. El sistema de programaci�n PUDU monitoriza la posici�n en tiempo real y las dimensiones cargadas de cada robot, y determina din�micamente si el segmento de pasillo actual soporta flujo de tr�fico de un carril o de dos. Los robots nunca se ponen en cola innecesariamente en pasillos que podr�an soportar circulaci�n en dos sentidos. A la inversa, si el ancho bajo carga pudiera comprometer el paso seguro, el sistema aplica autom�ticamente la prioridad de un solo carril.
\n\nEsta vista a�rea muestra dos unidades T600 navegando simult�neamente por el mismo pasillo estrecho en sentidos opuestos � el sistema ha calculado que la geometr�a del pasillo y las dimensiones de carga actuales permiten la operaci�n de dos carriles, manteniendo ambos robots en movimiento sin esperas.
\n\n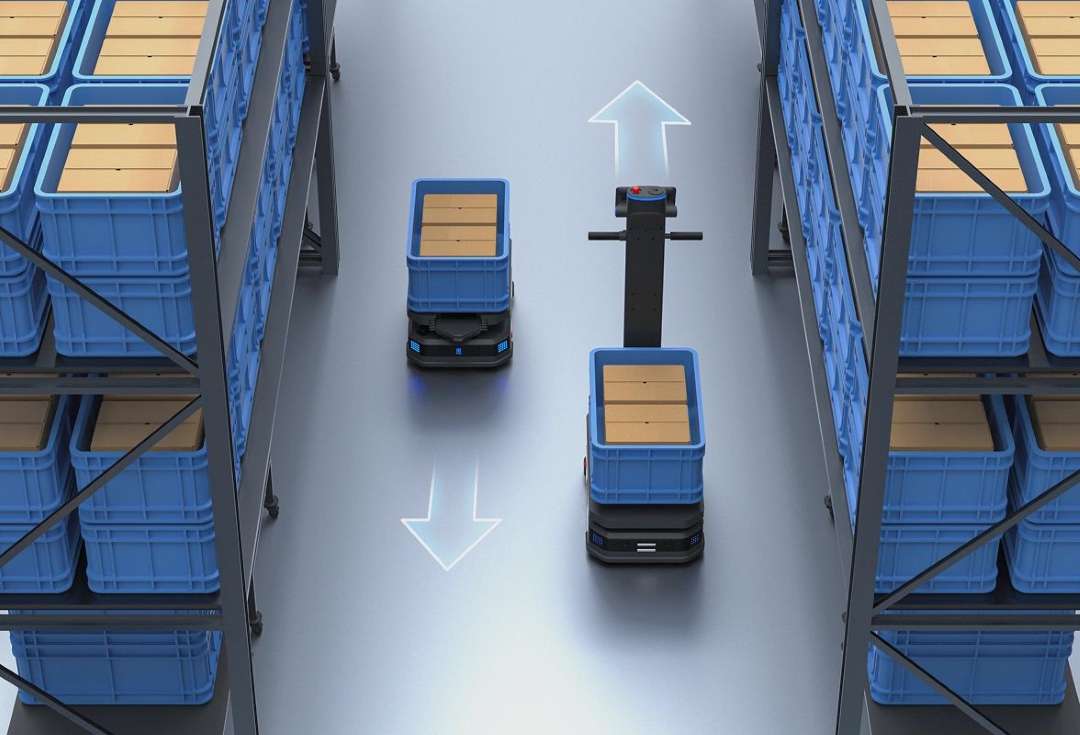 \n\n
\n\nIntegraci�n con Ascensores y Log�stica entre Plantas
\n\nLa log�stica de almac�n en m�ltiples plantas genera una ineficiencia sist�mica: los robots que esperan en ascensores ocupados durante los picos de turno. El T600 Underride aborda esto con su algoritmo de programaci�n de ascensores con prioridad a cabinas libres � el sistema de despacho monitoriza todas las cabinas en tiempo real, enruta los robots preferentemente a las cabinas actualmente disponibles y evita la acumulaci�n de tiempos de espera y la congesti�n del ascensor en horas punta. En instalaciones con varios bancos de ascensores, el algoritmo cruza distancia de desplazamiento y tiempo de espera estimado para seleccionar el punto de despacho �ptimo.
\n\nEl mapa de despacho muestra la planta de un almac�n con cuatro posiciones de ascensor. Las marcas de verificaci�n verdes indican ascensores disponibles para despacho inmediato del robot; los indicadores rojos se�alan cabinas ocupadas o bloqueadas. El programador enruta autom�ticamente el robot m�s cercano en espera hacia una cabina con estado verde.
\n\n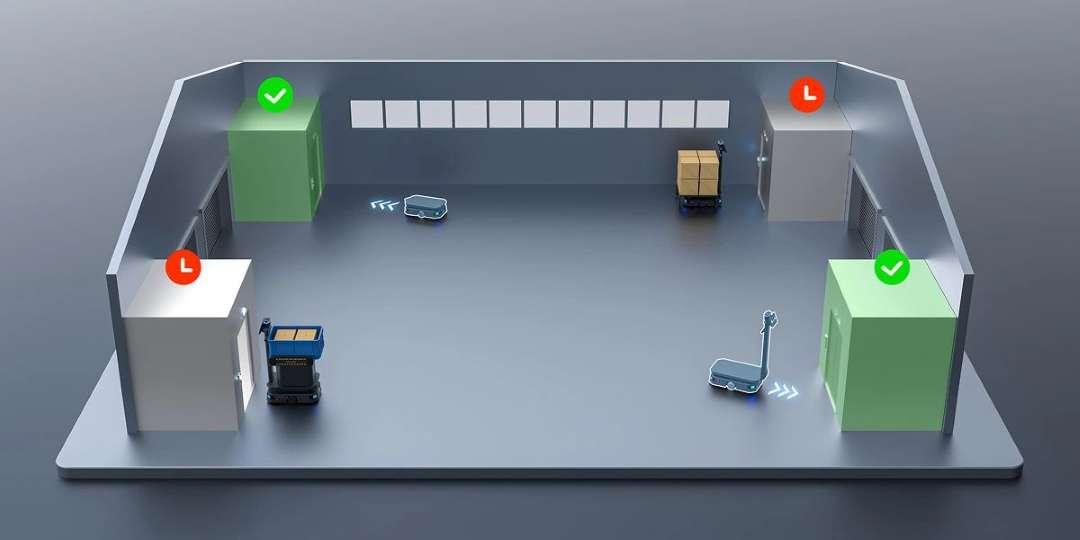 \n\n
\n\nM�s all� del control de ascensores, el T600 Underride se conecta de forma nativa con todo el ecosistema perif�rico IoT:
\n\n- \n
- control de puertas electr�nicas � acceso automatizado a puertas y barreras en las rutas del robot \n
- sistema de llamada mediante buscapersonas � despacho de tareas desde terminales de hardware f�sico \n
- aplicaci�n PUDU Link � seguimiento en tiempo real, gesti�n de misiones y control del robot desde dispositivos m�viles \n
- interfaz de hardware perif�rico � ampliable para sistemas de instalaciones personalizados e integraci�n con WMS de terceros \n
- despliegue en local � servidor local o nube privada para la seguridad de datos en red cerrada \n
Arquitectura de Seguridad Multicapa para la Coexistencia Humano-Robot
\n\nEl T600 Underride opera en entornos compartidos con personas y equipos de manejo manual. Su conjunto de seguridad combina LiDAR para cartograf�a ambiental en 360�, c�maras RGBD de profundidad apuntando hacia abajo para la detecci�n de obst�culos bajos, y sensores de colisi�n perimetrales en el chasis para la protecci�n por contacto directo. Una c�mara frontal complementa el conjunto de sensores para mayor conciencia del camino. Todas las zonas est�n activas simult�neamente durante el desplazamiento.
\n\nLa visualizaci�n de radar muestra el campo de detecci�n activo del T600 � zonas de sensores conc�ntricas se extienden desde el chasis, detectando la aproximaci�n de un transpal� manual amarillo antes de que el contacto sea posible. Esta detecci�n de m�ltiples zonas proporciona al robot distancia de reacci�n suficiente para planificar una trayectoria de evasi�n suave en lugar de una parada brusca.
\n\n \n\n
\n\nEvasi�n Din�mica de Obst�culos � Incluidos Objetos de Bajo Perfil
\n\nCon 255 mm de altura de chasis, el plano de digitalizado LiDAR del T600 Underride est� cerca del suelo � lo que significa que objetos por debajo del haz de detecci�n principal, como restos de cart�n, escombros o equipos peque�os, podr�an pasar inadvertidos. Las c�maras RGBD apuntando hacia abajo cierran esta brecha: detectan obst�culos bajos e inician el reencaminamiento aut�nomo sin interrumpir el movimiento del resto de la flota. Un solo robot ajusta su ruta; los dem�s contin�an sus misiones.
\n\nComo se muestra aqu�, un operario de almac�n se aproxima a la ruta de desplazamiento del T600. El sistema de sensores combinado registra la presencia humana y ejecuta una maniobra de evasi�n suave, manteniendo la continuidad de la misi�n mientras conserva la distancia de seguridad � una gesti�n de la convivencia humano-robot que no requiere cercados f�sicos ni zonas de exclusi�n.
\n\n \n\n
\n\nEvasi�n ante Emergencias � Protocolo de Respuesta ante Cat�strofes
\n\nEl T600 Underride se integra con la infraestructura de seguridad del edificio a trav�s de un m�dulo de evasi�n ante cat�strofes dedicado. Al recibir se�ales de alarma de incendio, alertas de sensores s�smicos u otros disparadores de emergencia equivalentes, el robot ejecuta inmediatamente una de dos respuestas preprogramadas: navegaci�n aut�noma hasta la zona de aparcamiento seguro designada m�s cercana, o parada controlada en la posici�n de suelo seguro m�s pr�xima. Esto garantiza que los robots cargados no bloqueen las v�as de evacuaci�n durante emergencias.
\n\nEsta ilustraci�n muestra una respuesta de emergencia simult�nea a nivel de flota � los indicadores de advertencia se activan en todos los robots, y cada unidad recalcula su ruta para despejar las zonas de trabajo activas, evitando los riesgos compuestos de la obstrucci�n por robot-carga durante una evacuaci�n.
\n\n \n\n
\n\nOperaci�n 24/7 � 12 Horas de Autonom�a con Carga R�pida
\n\nUna sola unidad T600 Underride ofrece 12 horas de funcionamiento continuo sin carga � y 6 horas a la capacidad m�xima de 600 kg. Esto cubre un turno completo est�ndar con margen suficiente. La bater�a de iones de litio de 30 Ah se recarga hasta el 90% en aproximadamente 2 horas, permitiendo el cambio de turno sin gesti�n manual de la bater�a.
\n\nSe soportan simult�neamente dos estrategias de carga: acoplamiento autom�tico en estaci�n de carga (el robot navega de forma independiente hacia la estaci�n disponible m�s cercana cuando el nivel de bater�a cae por debajo del umbral configurado), y sustituci�n r�pida de bater�a en caliente, que mantiene el robot alimentado durante 60 segundos en la extracci�n para un reemplazo sin interrupciones. Ambos modelos, Standard y Underride, utilizan la misma plataforma de estaci�n de carga, como se muestra a continuaci�n.
\n\n \n\n
\n\nInteligencia de Flota � Seguimiento en Tiempo Real en M�ltiples Plantas
\n\nUna sola unidad T600 Underride es un activo log�stico capaz. Una flota coordinada transforma el rendimiento del almac�n. La plataforma de gesti�n de flotas de PUDU consolida todas las unidades T600 en plantas, edificios y emplazamientos en un �nico panel de operaciones en tiempo real � mostrando el tipo de misi�n, el porcentaje de bater�a, el estado de alertas y la posici�n f�sica en planta de cada robot activo simult�neamente.
\n\nEl panel mostrado aqu� gestiona 26 robots T600 distribuidos en cinco plantas. Los indicadores de estado con c�digo de color distinguen los robots activos de los que est�n cargando, en espera, en parada de emergencia o con anomal�as de misi�n marcadas � ofreciendo a los supervisores de operaciones una visibilidad completa de la situaci�n sin necesidad de recorrer las instalaciones.
\n\n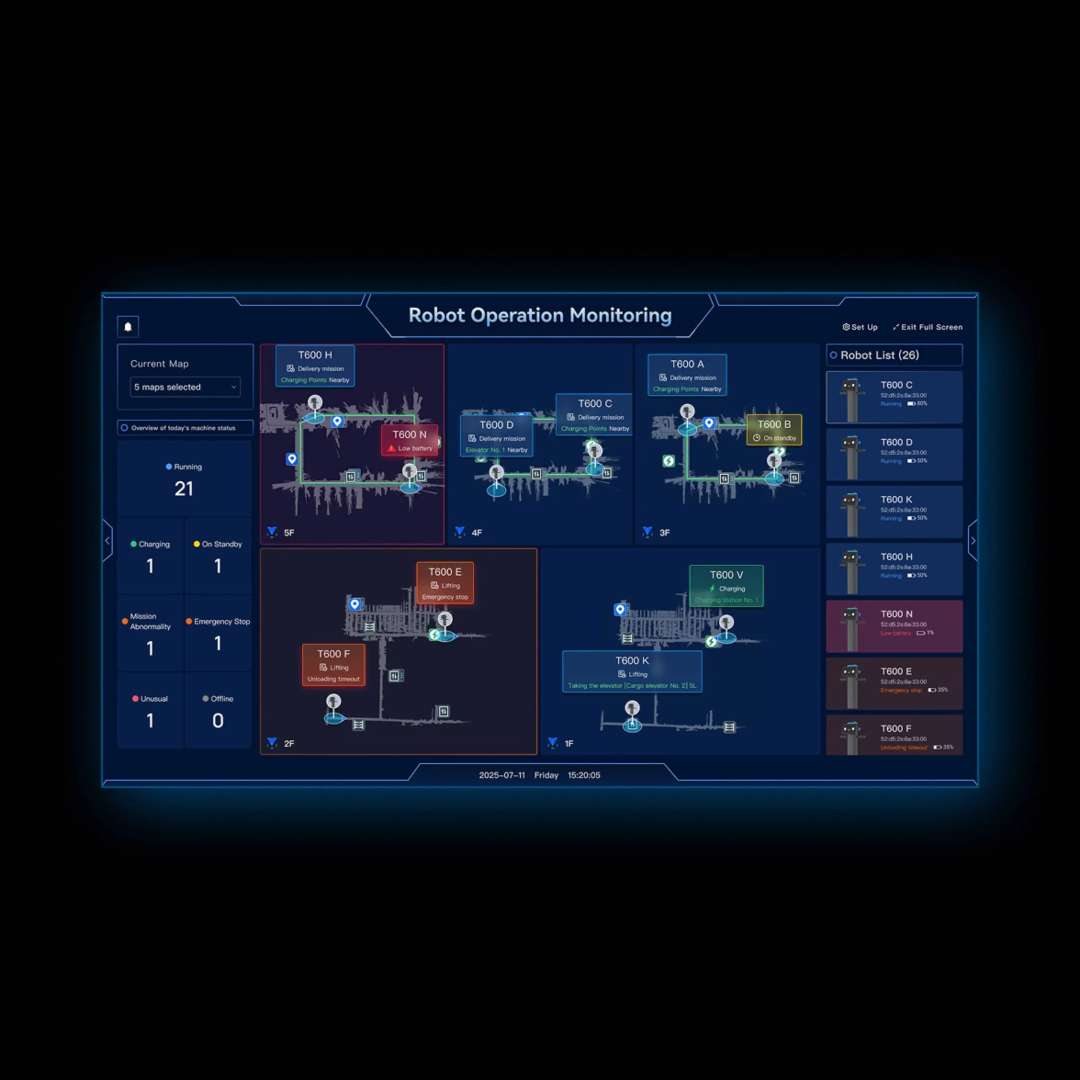 \n\n
\n\nA mayor escala, la conformidad con el protocolo VDA5050 del T600 Underride le permite operar como nodo par dentro de ecosistemas log�sticos inteligentes de m�ltiples proveedores � programable junto a cualquier otro activo compatible con VDA5050 sin integraci�n personalizada. El protocolo elimina la dependencia de los sistemas propietarios que hist�ricamente fragmentaba los despliegues de automatizaci�n de almacenes, habilitando una capa de programaci�n verdaderamente unificada para plataformas rob�ticas diversas.
\n\nLa siguiente vista general muestra una instalaci�n industrial a gran escala con decenas de plataformas rob�ticas � AMR, brazos rob�ticos, robots de servicio � coordinados a trav�s de una infraestructura WiFi compartida. El T600 Underride participa como miembro de pleno derecho en este entorno conectado, recibiendo y reportando datos de misi�n a trav�s de la misma red troncal.
\n\n \n\n
\n\nLa Serie T600 � Configuraciones Underride y Standard
\n\nEl T600 Underride es una de las dos variantes de plataforma que comparten la misma base de chasis de 600 kg. Su contraparte, el T600 Standard, a�ade una pantalla t�ctil de 10,1 pulgadas para la operaci�n aut�noma sin un sistema de control central, un tirador ergon�mico con interruptor de asistencia de potencia, un proyector de contorno de seguridad frontal y navegaci�n h�brida VSLAM+LiDAR. La versi�n Standard mide 960 � 500 � 1350 mm y pesa 112 kg, siendo adecuada para el transporte de carga en superficie sobre plataformas de carga externas por encima de la altura de las estanter�as.
\n\nLa versi�n Standard se muestra aqu� con un soporte de carga externo, transportando cajas grandes apiladas � demostrando la configuraci�n de plataforma elevada que complementa el enfoque sub-estanter�a del Underride dentro de un despliegue de flota mixta.
\n\n \n\n
\n\nEl interruptor de asistencia de potencia del modelo Standard est� dise�ado para los momentos en que es necesario el reposicionamiento manual � al pulsarlo se activa la asistencia de accionamiento el�ctrico, facilitando el guiado del robot incluso bajo carga significativa. Esta interfaz est� ausente en el Underride (que opera exclusivamente bajo control aut�nomo o mediante el sistema de programaci�n), pero contextualiza la filosof�a de dise�o de la plataforma T600: usabilidad para el operario en cada punto de interacci�n.
\n\nEn esta imagen, un operario utiliza el tirador de asistencia de potencia para guiar el T600 Standard por un pasillo de almac�n con cajas de almacenamiento azules, ilustrando el modo de interacci�n humano-m�quina disponible en la configuraci�n Standard durante la instalaci�n, el reposicionamiento de mantenimiento o la anulaci�n manual de tareas.
\n\n \n\n
\n\n\n\n\nConsejo t�cnico: Antes de la primera misi�n de producci�n, configure las dimensiones del robot cargado en Ajustes > Funciones del robot > Configuraci�n de marcha > Anchura total (Y) (rango: 500�1200 mm) y Saliente trasero (X) (rango: 0�400 mm) para que coincidan con la huella real del T600 Underride con su estanter�a o estructura de carga acoplada. El algoritmo de estrategia de tr�fico en pasillos estrechos utiliza estas dimensiones en tiempo real para calcular la elegibilidad de circulaci�n en dos carriles. Valores demasiado peque�os impedir�n al sistema utilizar el modo de dos carriles incluso cuando la geometr�a lo permita; valores demasiado grandes aplicar�n innecesariamente el enrutamiento de un solo carril, reduciendo el rendimiento. Asimismo, aseg�rese de que las superficies reflectantes o transparentes a 14�22 cm de altura se traten con pegatinas mate antes del despliegue � pueden interferir con la localizaci�n por LiDAR a la altura de operaci�n del T600 Underride.
\n
El sistema de conciencia espacial multicapa � que combina la detecci�n por rango LiDAR, las c�maras de profundidad RGBD y los sensores de colisi�n � crea envolventes de detecci�n superpuestas que tienen en cuenta el bajo perfil del chasis del robot. La visualizaci�n siguiente muestra tanto las unidades Standard como Underride mapeando activamente sus rangos de detecci�n de sensores en un entorno de almac�n en vivo, con la perspectiva a nivel del suelo del Underride proporcionando una cobertura especialmente densa para obst�culos bajos.
\n\n \n\n
\n\nEspecificaciones t�cnicas del PUDU T600 Underride
\n\nDimensiones f�sicas
\n| Dimensiones (L � An � Al) | \n845 � 500 � 255 mm (33,3 � 19,7 � 10,0 in) | \n
|---|---|
| Peso del robot | \n94 kg (207,23 lbs) | \n
| Carga m�xima | \n600 kg (1322,77 lbs) | \n
| Tipo de chasis | \nUnderride (bajo perfil, navegaci�n sub-estanter�a) | \n
Rendimiento y bater�a
\n| Voltaje de operaci�n | \nDC 20,8 V ~ 29,2 V | \n
|---|---|
| Capacidad de bater�a | \n30 Ah | \n
| Tiempo de carga | \nAprox. 2 h (del 0% al 90%) | \n
| Autonom�a de bater�a | \n12 h (sin carga); 6 h (carga m�xima 600 kg) | \n
| Velocidad de crucero | \n0,2�1,2 m/s (ajustable) | \n
Navegaci�n y sensores
\n| M�todo de navegaci�n | \nLiDAR SLAM (exclusivamente Laser-SLAM) | \n
|---|---|
| Sensores | \nLiDAR, c�maras RGBD orientadas hacia abajo, sensores de colisi�n, c�mara frontal | \n
| Pasillo m�nimo transitable | \n65 cm (25,6 in) | \n
| Altura m�xima de obst�culo superable | \n10 mm (0,39 in) | \n
| Paso m�ximo sobre huecos | \n35 mm (1,38 in) | \n
Condiciones de operaci�n
\n| Temperatura de operaci�n | \n0�C ~ 40�C (32�F ~ 104�F) | \n
|---|---|
| Altitud de operaci�n | \n< 2000 m (6561,68 ft) | \n
| Temperatura de almacenamiento de bater�a | \n-20�C ~ 60�C (en 1 mes); 25%�50% HR | \n
| Requisitos de suelo | \nSuperficie seca y plana; pendiente m�xima ? 3� | \n
| Protocolo compatible | \nVDA5050 | \n
\n\n
C�mo poner en marcha y desplegar el PUDU T600 Underride
\nProcedimiento paso a paso para el encendido inicial, la configuraci�n de dimensiones y la preparaci�n del primer despliegue del robot aut�nomo PUDU T600 Underride, basado en la Gu�a de Operaci�n oficial V1.1.1.
\n\nPaso 1: Carga inicial al 100%
\nAntes del primer uso operativo, cargue la bater�a al 100% con el cargador suministrado o acopl�ndose en la estaci�n de carga autom�tica. Inserte el cargador con cable en el puerto de carga o seleccione "Cargar ahora" en la interfaz de programaci�n PUDU para el acoplamiento autom�tico. No utilice el robot con carga parcial durante la primera puesta en marcha.
\nPaso 2: Encendido del robot
\nPulse y mantenga presionado el interruptor de encendido durante aproximadamente 3 segundos hasta que los indicadores luminosos del chasis se pongan azules. Esto confirma que el robot ha completado su secuencia de arranque y est� listo para la configuraci�n o el despacho aut�nomo. Para apagarlo, mantenga presionado el interruptor de encendido durante 8 segundos (procedimiento espec�fico del Underride � m�s tiempo que la versi�n Standard).
\nPaso 3: Configuraci�n de las dimensiones cargadas
\nVaya a Ajustes > Funciones del robot > Configuraci�n de marcha y establezca las dimensiones de operaci�n para que coincidan con la huella cargada del robot. Configure el Saliente trasero (X) entre 0�400 mm y la Anchura total (Y) entre 500�1200 mm para reflejar las dimensiones reales con la estructura de estanter�a o carga acoplada. Estos par�metros controlan la estrategia de tr�fico en pasillos estrechos � valores incorrectos reducen el rendimiento de la flota.
\n






















 � Robot de Publicidad y Hostes")

