



- Disponibilidad: En stock
- Código del producto: G1-COMP-EDU
- Peso bruto: 68.00kg
El Unitree G1-Comp EDU es un robot humanoide bípedo de tamaño real diseñado específicamente para la robótica competitiva y la investigación universitaria avanzada, con una altura aproximada de 130 cm y un peso en torno a los 35 kg. Cuenta con 37 grados de libertad, un par máximo de articulación de 120 N.m, manos diestras Dex3-1 con control de fuerza incluidas de serie y el módulo de computación de desarrollo NVIDIA Jetson Orin NX con 100 TOPS de inferencia de inteligencia artificial, estableciendo así un nuevo nivel de referencia para plataformas humanoides desplegables.
| Grados de libertad totales | 37 (configuración G1-Comp EDU) |
|---|---|
| Par máximo — articulación de rodilla | 120 N.m |
| Módulo de computación IA | NVIDIA Jetson Orin NX — 100 TOPS |
| Autonomía de la batería | ~2 h (9000 mAh, extracción rápida) |
La imagen a continuación muestra al G1-Comp en su entorno competitivo natural: un campo de fútbol de dimensiones reglamentarias. La marcha estable y el movimiento decidido que exhibe justifican plenamente su denominación de «Football Icon Designed for Competitions».

Cuerpo diseñado para la competición: 130 cm, 35 kg, listo para moverse
Con unas dimensiones de 1320 × 450 × 200 mm en posición vertical y plegable hasta 690 × 450 × 300 mm para su transporte, el G1-Comp EDU ocupa la envolvente física de un ser humano adulto de estatura pequeña. Con un peso aproximado de 35 kg incluida la batería, la estructura logra una notable relación potencia-peso gracias a su tracción íntegramente eléctrica. Sin hidráulica, sin neumática: cada articulación está accionada por un motor de eje hueco de desarrollo propio de Unitree, y todo el cableado discurre internamente a través de la estructura hueca de cada articulación, eliminando por completo cualquier punto de enganche exterior.
La imagen siguiente muestra las dimensiones en posición vertical y plegada que hacen del G1-Comp una plataforma cómoda de transportar entre sedes de competición y laboratorios de investigación.

37 grados de libertad: arquitectura de movimiento similar a la humana
La credibilidad de un robot humanoide depende directamente de su arquitectura cinemática. El G1-Comp EDU incorpora 37 grados de libertad totales: la plataforma base ofrece entre 25 y 45 GdL configurables en piernas, cintura, brazos y cabeza, mientras que las manos diestras de tres dedos Dex3-1 incluidas añaden 7 GdL por mano y 2 GdL opcionales de muñeca por brazo. Cada pierna articula en 6 GdL (cadera 3 + rodilla 1 + tobillo 2), lo que confiere al robot el rango de abducción, rotación y flexión de cadera necesario para una marcha bípeda ágil, desplazamiento lateral y recuperación ante perturbaciones externas.
Rango de movimiento articular superamplio
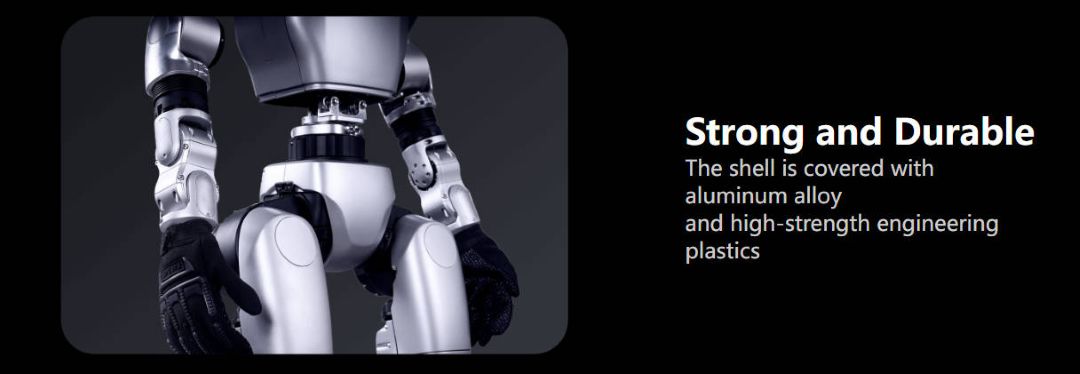
En comparación con muchas plataformas humanoides académicas, el G1-Comp ofrece una envolvente angular excepcionalmente amplia. La cintura gira en Z±155°, X±45°, Y±30°; la rodilla flexiona de 0° a 165°; la flexoextensión de cadera abarca ±154°. Estos rangos permiten agacharse, alcanzar objetos y realizar traslados dinámicos del centro de masa que los robots con GdL restringidos simplemente no pueden ejecutar. La carcasa, visible en la imagen siguiente, está fabricada en aleación de aluminio reforzada con plásticos técnicos de alta resistencia, una combinación que absorbe cargas de impacto en competición sin añadir masa innecesaria a la cadena cinemática.
Sistema de doble codificador en cada articulación
La precisión de posición bajo carga es un reto persistente en robots humanoides con muchos GdL. El G1-Comp lo resuelve con un sistema de doble codificador en cada articulación: un codificador en el rotor del motor y un segundo en el eje de salida. Este circuito de realimentación redundante proporciona estados articulares precisos y estables incluso cuando interferencias externas o la holgura mecánica degradarían el rendimiento de un sistema de codificador único. El resultado: una transferencia Sim2Real fiable, donde los comportamientos entrenados en Isaac Gym o MuJoCo se ejecutan de forma predecible en el robot físico.

Rendimiento locomotor: marcha bípeda a 2 m/s
El sistema de control de movimiento a bordo del G1-Comp alcanza una velocidad de desplazamiento de punta de 2 m/s, suficiente para competir en los formatos de partido estándar de RoboCup Soccer. El controlador de movimiento de referencia en el sector está diseñado específicamente para entornos de partido competitivo, manteniendo la estabilidad de la marcha frente a perturbaciones por contacto con el balón y hacinamiento lateral de robots adversarios.
Control de equilibrio superestable
En la práctica, el control del equilibrio determina si un robot de competición permanece erguido o acaba en el suelo. El sistema de control del G1-Comp absorbe empujones imprevistos y variaciones de superficie sin interrumpir la continuidad de la marcha. El fotograma siguiente muestra al robot en plena zancada, con su centro de masa proyectado correctamente sobre el polígono de sustentación: la marca distintiva de un controlador de cuerpo completo bien ajustado.

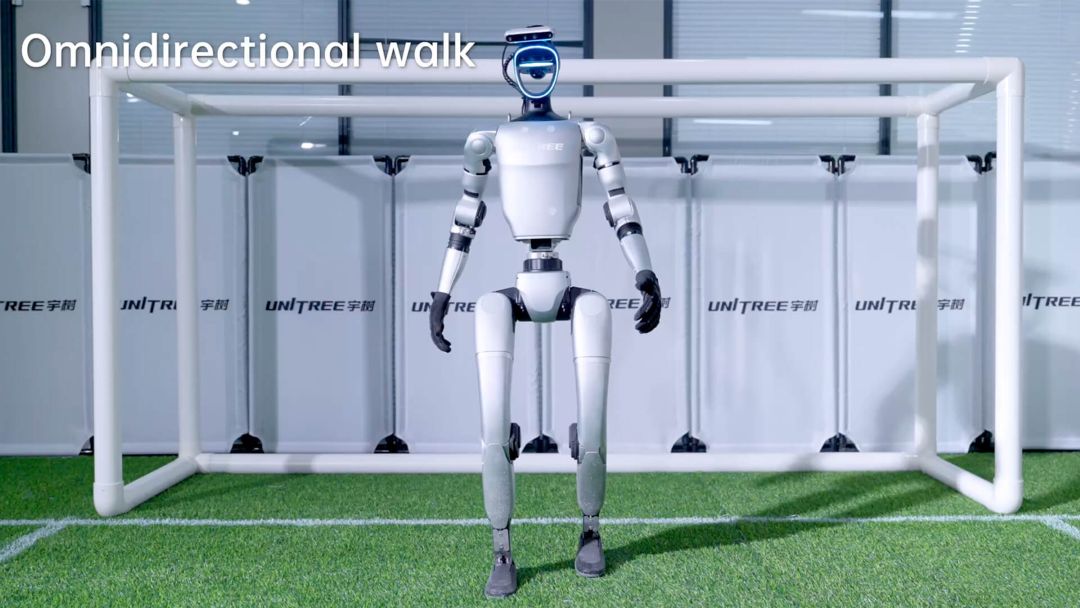
Marcha omnidireccional
Más allá de la locomoción en línea recta, el G1-Comp soporta marcha omnidireccional: traslación lateral, rotación en el sitio y cambio de orientación sin necesidad de detenerse. Esta capacidad es imprescindible para el reposicionamiento cerca de portería en el fútbol, y resulta igualmente útil en tareas de inspección o manipulación en entornos de investigación con obstáculos, donde la gestión ágil de la huella del robot es determinante.
Manos diestras Dex3-1: manipulación con control de fuerza
A diferencia de muchos robots humanoides de competición que se entregan con pinzas pasivas, el G1-Comp EDU incluye de serie un par de manos diestras de tres dedos Dex3-1. Cada mano ofrece 7 grados de libertad activos: el pulgar contribuye con 3 GdL; el índice y el corazón con 2 GdL cada uno. La matriz sensorial de fuerza abarca un rango de percepción de 10 g a 2500 g, lo que permite asir con precisión tanto objetos delicados como el equipamiento estándar de competición. La tensión de funcionamiento es de 12–58 V, alimentándose directamente del bus de potencia del robot. Como actualización opcional se dispone de una matriz de sensores táctiles para flujos de trabajo de investigación que requieran retroalimentación de contacto a nivel de piel.
El retrato siguiente muestra el sistema G1-Comp EDU completo: obsérvese la cámara de profundidad montada en el casco, la configuración de brazos bimanual y las manos Dex3-1, de apariencia enguantada, que confieren a la plataforma su inconfundible carácter humanoide.

NVIDIA Jetson Orin NX: 100 TOPS para IA a bordo
La unidad de computación de desarrollo dedicada, un NVIDIA Jetson Orin NX, aporta 100 TOPS de rendimiento de inferencia de inteligencia artificial junto con una CPU Arm Cortex-A78AE de 8 núcleos a hasta 2 GHz, 16 GB de memoria unificada y 1024 núcleos GPU NVIDIA Ampere. No se trata de un cliente ligero que descargue cómputo en la nube: toda inferencia, percepción y decisión de control se ejecutan a bordo en tiempo real. La unidad de computación operativa que gestiona el control motor de bajo nivel ejecuta un programa propietario de Unitree no accesible para el usuario final, preservando la integridad del control de movimiento mientras deja el entorno completo del Jetson abierto para el desarrollo personalizado.
Configuración de interfaces de hardware
El panel lateral derecho del G1-Comp expone una rica interfaz de hardware para el desarrollo secundario. La imagen siguiente muestra la configuración completa: puertos USB Type-C compatibles con modos host USB 3.0 y USB 3.2 con salida de alimentación de 5 V / 1,5 A, dos puertos RJ45 Gigabit Ethernet para flujos de datos de sensores de alto ancho de banda y raíles de alimentación multitensión a 5 V, 12 V, 24 V y 54,8 V. El sistema de cámara de profundidad utiliza una Intel RealSense D455, que combinada con la rotación de cabeza en 2 GdL alcanza una cobertura de campo visual de 180°. La matriz de 4 micrófonos incorpora reducción de ruido y cancelación de eco para una recepción fiable de comandos de voz incluso en los ruidosos entornos de competición.

Ecosistema de desarrollo abierto
Más allá de la potencia de cómputo bruta, el G1-Comp EDU incluye un programa de desarrollo completo. El diagrama siguiente muestra los seis pilares del ecosistema: una capa API multinivel (alto nivel, bajo nivel, DDS, audio/iluminación); entornos de simulación en Isaac Gym y MuJoCo; interacción multimodal mediante el modelo de lenguaje amplio UnifoLM con soporte TTS y ASR; compatibilidad con el ecosistema ROS; una aplicación móvil para configuración rápida; y el Jetson Orin NX como unidad de computación de desarrollo. La compatibilidad con ROS implica que las bases de código existentes del laboratorio, los controladores de sensores y los conductos de visualización se portan con un trabajo mínimo de adaptación.

SDK RoboCup: de la simulación al despliegue en competición
El SDK RoboCup dedicado tiende el puente entre el entrenamiento de políticas y el día de partido. Tres capas de API especializadas cubren cada etapa del proceso de un agente competitivo. La API de reconocimiento visual expone la red de detección de objetos en tiempo real YOLO11 integrada, proporcionando una rica interfaz de información del estadio que identifica la posición del balón, la orientación de la portería, y la localización de compañeros y rivales. La API de posicionamiento espacial combina el posicionamiento geométrico monocular con el posicionamiento por profundidad binocular para estimas de posición métricas precisas dentro del campo. La API de control de movimiento traduce señales de decisión de alto nivel en comandos válidos de locomoción y manipulación.
El entrenamiento se apoya en el marco de aprendizaje por refuerzo unitree_rl_gym, que integra Isaac Gym y MuJoCo para una simulación física eficiente. Los parámetros de entrenamiento (número de entornos paralelos, semilla aleatoria, iteraciones máximas) son completamente configurables. El proceso completo Sim2Sim → Sim2Real está documentado y soportado. La imagen siguiente muestra al G1-Comp ejecutando un comportamiento de aproximación al balón entrenado mediante RL en una pista de pruebas interior.

Consejo técnico: Al transferir una política entrenada en Isaac Gym al G1-Comp físico, active los ajustes preestablecidos de aleatorización de dominio sim-to-real para la fricción del terreno (μ = 0,4–1,2) y el retardo del motor (5–20 ms). Estos rangos de parámetros reflejan la variabilidad real observada en las superficies de césped artificial de competición. El entrenamiento sin aleatorización de dominio produce políticas que degradan significativamente en el primer despliegue físico.
Batería de 9000 mAh: ~2 horas de operación continua
El G1-Comp funciona con una batería de litio de 13 cadenas y 9000 mAh que proporciona aproximadamente 2 horas de autonomía operativa en condiciones de actividad mixta típicas. El mecanismo de extracción rápida permite cambiar la batería en cuestión de segundos, algo crítico en torneos donde el tiempo de preparación entre partidos es limitado. El cargador opera a 54 V / 5 A. Las actualizaciones inteligentes de programa por OTA se instalan de forma inalámbrica, manteniendo actualizados el control de movimiento y los componentes del SDK sin necesidad de conexión física a un equipo informático.
El gráfico siguiente ilustra la autonomía aproximada de 120 minutos junto con las características de cambio rápido y carga rápida incluidas en el paquete G1-Comp.
Especificaciones técnicas del Unitree G1-Comp EDU
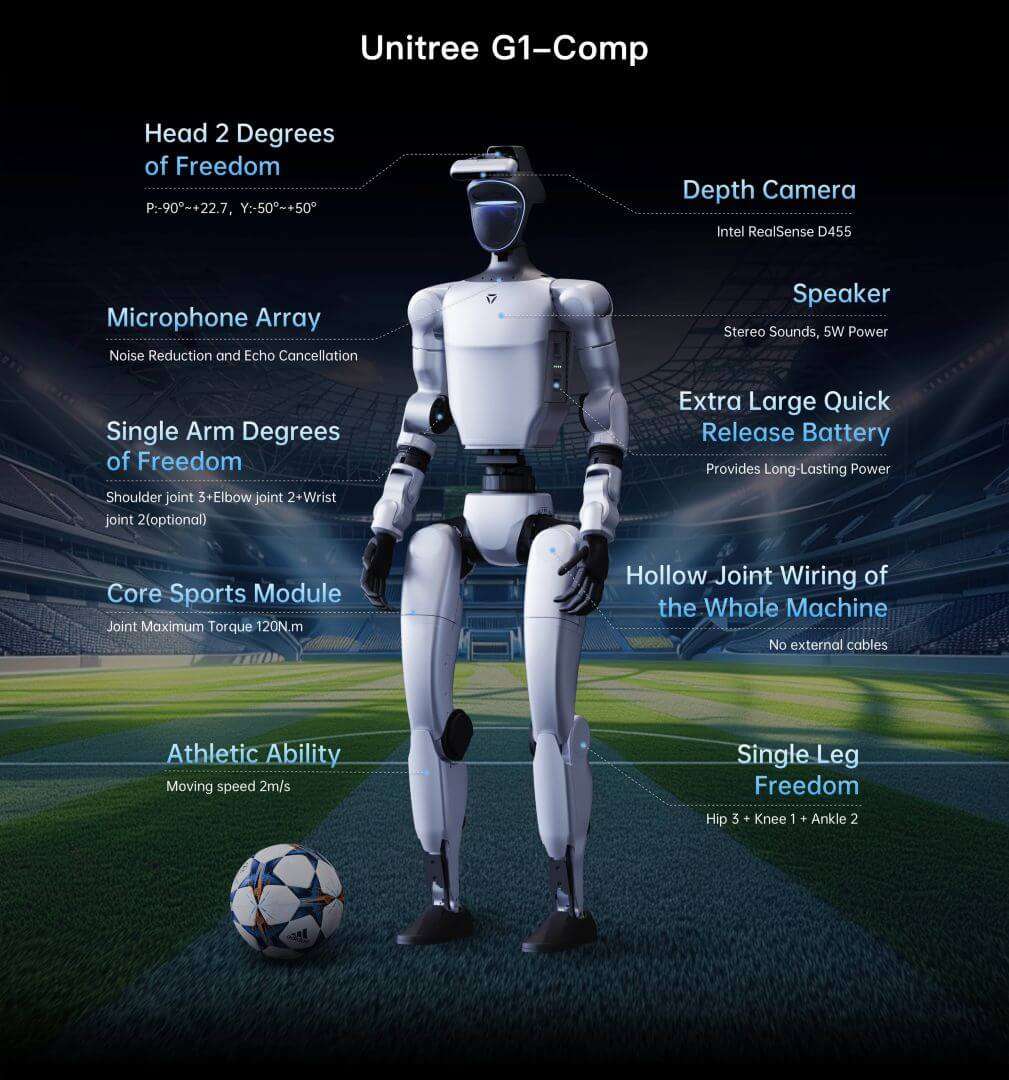
El diagrama anotado siguiente proporciona una referencia visual de los componentes clave de hardware y su ubicación física en la plataforma G1-Comp EDU, como preámbulo a las tablas numéricas completas de especificaciones.
Dimensiones mecánicas
| Modelo | G1 Comp |
|---|---|
| Altura × anchura × grosor (posición vertical) | 1320 × 450 × 200 mm |
| Altura × anchura × grosor (plegado) | 690 × 450 × 300 mm |
| Peso (con batería) | ~35 kg+ |
| Material de la carcasa | Aleación de aluminio + plásticos técnicos de alta resistencia |
| Longitud pantorrilla + muslo | 0,6 m |
| Envergadura | ~0,45 m |
Grados de libertad
| GdL totales — configuración G1-Comp EDU | 37 |
|---|---|
| GdL totales — rango de plataforma base | 25–45 (configurable) |
| GdL de una pierna | 6 (cadera 3 + rodilla 1 + tobillo 2) |
| GdL de la cintura | 1 + 2 adicionales opcionales |
| GdL de un brazo | 5 (hombro 3 + codo 2) |
| GdL de la cabeza | 2 |
| GdL de una mano — Dex3-1 (incluida) | 7 + 2 GdL de muñeca opcionales (pulgar 3 + índice 2 + corazón 2) |
Rendimiento articular
| Par máximo — articulación de rodilla | 120 N.m |
|---|---|
| Carga máxima del brazo | ~3 kg |
| Velocidad máxima de desplazamiento | 2 m/s |
| Tipo de codificador articular | Doble codificador (rotor + eje de salida) |
| Cableado eléctrico interior en todas las articulaciones | Sí — sin cables exteriores |
| Sistema de refrigeración | Refrigeración local por aire |
Rango de movimiento articular
| Rango articulación de cintura | Z±155°, X±45°, Y±30° |
|---|---|
| Rango articulación de rodilla | 0~165° |
| Rango articulación de cadera | P±154°, R-30~+170°, Y±158° |
| Rango articulación de muñeca | P±92,5°, Y±92,5° |
| Rango articulación de cabeza | P:-90°~+22,7°, Y:-50°~+50° |
Computación e inteligencia artificial
| Potencia de computación básica | CPU de alto rendimiento de 8 núcleos |
|---|---|
| Módulo de computación de desarrollo | NVIDIA Jetson Orin NX |
| Rendimiento de IA | 100 TOPS |
| CPU del Jetson | Arm Cortex-A78AE, 8 núcleos, hasta 2 GHz |
| Tarjeta gráfica del Jetson | 1024 núcleos CUDA NVIDIA arquitectura Ampere |
| Memoria del Jetson | 16 GB de memoria unificada |
Sensores y percepción
| Cámara de profundidad | Intel RealSense D455 (campo visual 180° con rotación de cabeza) |
|---|---|
| LiDAR 3D | Sí — campo visual horizontal 360°, vertical 59° |
| Array de micrófonos | 4 micrófonos con reducción de ruido y cancelación de eco |
| Altavoz | 5 W estéreo |
Conectividad e interfaces
| WiFi | WiFi 6 |
|---|---|
| Bluetooth | Bluetooth 5.2 |
| Red cableada | Ethernet Gigabit ×2 (RJ45) |
| Interfaces USB | USB 3.0 Type-C ×3, USB 3.2 / DP1.4 Type-C ×1 |
| Raíles de alimentación (accesibles para desarrollo) | 5 V, 12 V, 24 V, 54,8 V |
Alimentación y batería
| Fuente de alimentación | Batería de litio de 13 cadenas |
|---|---|
| Capacidad de la batería inteligente | 9000 mAh (extracción rápida) |
| Cargador | 54 V / 5 A |
| Autonomía de la batería |
Productos vistos recientemente

Marca: Unitree
Código del producto: G1-COMP-EDU
El Unitree G1-Comp EDU es un robot humanoide bípedo de tamaño
real diseñado específicamente para la robótica competitiva y la investigación
univ..
46 900€
Sin IVA:38 760€


Marca: Unitree
Código del producto: G1-AIR
El Unitree G1 AIR es un robot humanoide compacto y totalmente eléctrico diseñado para demostraciones
profesionales, eventos en directo y exhibici..
24 805€
Sin IVA:20 500€
Marca: Unitree
Código del producto: 920372000000574904
El Unitree G1 Edu Standard-U1 es un robot humanoide compacto diseñado para la investigación avanzada en inteligencia artificial y la robótica educativ..
35 000€
Sin IVA:28 926€
Marca: Unitree
Código del producto: 920372000000574888
El Unitree G1 Edu Flagship C-U5 es un robot humanoide a escala real diseñado para investigación avanzada de inteligencia artificial, experimentos de i..
69 900€
Sin IVA:57 769€
Marca: Unitree
Código del producto: 920372000000574880
El Unitree G1 Edu Flagship B-U4 es un robot humanoide de tamaño real destinado a universidades, laboratorios de I+D y programas avanzados de robótica,..
62 900€
Sin IVA:51 983€
Marca: Unitree
Código del producto: 920372000000574864
El Unitree G1 Edu Advanced-U2 es un robot humanoide de investigación con 29 grados de libertad diseñado para universidades, laboratorios de I+D y equi..
41 900€
Sin IVA:34 628€
Marca: Unitree
Código del producto: 920372000000574872
El Unitree G1 Edu Flagship A-U3 es un robot humanoide de investigación diseñado para laboratorios de robótica avanzada e IA encarnada, equipado con 43..
53 900€
Sin IVA:44 545€
Marca: Unitree
Código del producto: 920372000000574896
El Unitree G1 Edu Flagship D-U6 es un robot humanoide de investigación con 41 grados de libertad, diseñado para el desarrollo de inteligencia artifici..
69 000€
Sin IVA:57 025€
Marca: Unitree
Código del producto: RB-G1-U7-EDU
El UNITREE G1-U7 EDU es un robot humanoide de tamaño real diseñado para la investigación académica, la automatización industrial y el desarrollo avanz..
64 900€
Sin IVA:53 636€
Marca: Unitree
Código del producto: G1-U8-EDU
El Unitree G1-U8 EDU es un robot humanoide de talla completa diseñado para investigación en robótica, educación avanzada y prototipado de automatizaci..
58 000€
Sin IVA:47 934€
Marca: Unitree
Código del producto: G1-U9-EDU
El UNITREE G1-U9 EDU es un robot humanoide de escala real diseñado para investigación avanzada y automatización industrial, con una altura de 1.320 mm..
59 000€
Sin IVA:48 760€
Marca: Unitree
Código del producto: G1-U10-EDU
El Unitree G1-U10 EDU es un robot humanoide de tamaño real diseñado para la investigación en aprendizaje por imitación con IA, manipulación avanzada y..
54 000€
Sin IVA:44 628€
 Robot Humanoide")
 Robot Humanoide")
Marca: Unitree
Código del producto: G1-D-Flagship
El Unitree G1-D Flagship es un robot humanoide de servicio
sobre ruedas diseñado para el despliegue comercial sostenido, que combina
brazos dual..
59 000€
Sin IVA:48 760€


Marca: Unitree
Código del producto: GO2-EDU-ENT1
El Unitree Go2 EDU ENT U1 es un robot cuadrúpedo profesional
diseñado para inspección en campo, seguridad perimetral e investigación
universitar..
17 500€
Sin IVA:14 463€
Marca: Unitree
Código del producto: 920372000000574816
Desbloquee todo el potencial de la
inteligencia artificial integrada con el
Perro Robótico Unitree Go2 Edu Intelligent U2, una
plataforma cua..
17 500€
Sin IVA:14 463€
Marca: Unitree
Código del producto: 920372000000574824
Perro Robótico Unitree Go2 Láser Inteligente U3: El Futuro de la Robótica IA
Desbloquee todo el
potencial de la inteligencia artificial con ..
18 900€
Sin IVA:15 620€

Marca: PUDU
Código del producto: 00-00014079
PUDU MT1 Max robot industrial autónomo de limpieza con IA
PUDU MT1 Max es un robot de limpieza industrial de nueva generación diseñado para automatiz..
24 079€
Sin IVA:19 900€


Marca: PUDU
Código del producto: 00-00014081
PUDU CC1 Pro robot inteligente de limpieza con IA
PUDU CC1 Pro es una solución avanzada de limpieza autónoma diseñada para el mantenimiento completo ..
24 200€
Sin IVA:20 000€

Marca: PUDU
Código del producto: 00-00014080
PUDU CC1 Black Pro robot inteligente de limpieza con IA
PUDU CC1 Black Pro es una versión mejorada de la serie CC1, diseñada para el mantenimiento co..
25 410€
Sin IVA:21 000€


Marca: PUDU
Código del producto: 00-00014083
PUDU BellaBot Pro (White) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (White) es un robot de servicio autónomo diseñado para restaura..
13 310€
Sin IVA:11 000€


Marca: PUDU
Código del producto: 00-00014082
PUDU BellaBot Pro (Black) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (Black) es un robot de servicio autónomo moderno diseñado par..
13 310€
Sin IVA:11 000€


Marca: PUDU
Código del producto: 10080-000097
El PUDU SwiftBot es un robot de servicio comercial de
interior diseñado para la entrega autónoma de alimentos, el transporte de
artículos y la int..
13 915€
Sin IVA:11 500€

Marca: PUDU
Código del producto: 10040-000071
El PUDU BellaBot es un robot de reparto autónomo de interior diseñado para
restaurantes, hoteles y entornos de servicio comercial, que combina posic..
9 680€
Sin IVA:8 000€


Marca: PUDU
Código del producto: 10070-000059
PUDU KettyBot Pro es un robot autónomo de entrega y recepción diseñado para restaurantes, hoteles y entornos de venta al público, con navegación SLAM ..
9 075€
Sin IVA:7 500€


Marca: PUDU
Código del producto: 10170-000015
El PUDU PuduBot 2 es un robot de reparto autónomo para
interiores diseñado para entornos comerciales de alta actividad: restaurantes,
hoteles, hos..
7 078€
Sin IVA:5 850€

Marca: PUDU
Código del producto: 10050-000069
El PUDU HolaBot es un robot de servicio autónomo de alta
capacidad diseñado para entornos de hostelería, sanidad y comercio con alto
volumen de ac..
11 011€
Sin IVA:9 100€


Marca: PUDU
Código del producto: 10250-000008
El PUDU MT1 es un robot barredora autónomo con inteligencia
artificial, diseñado para entornos comerciales e industriales de gran
afluencia: almac..
18 029€
Sin IVA:14 900€

Marca: PUDU
Código del producto: 10080-000037
El PUDU FlashBot es un robot autónomo de entrega para edificios diseñado
específicamente para hoteles y torres de oficinas de múltiples plantas, cap..
16 335€
Sin IVA:13 500€
 – Robot de Publicidad y Hostes")
Marca: PUDU
Código del producto: 10070-000011
PUDU KettyBot es un robot de entrega y recepción
multipropósito diseñado para restaurantes, hoteles, supermercados y entornos
comerciales de alto ..
8 349€
Sin IVA:6 900€

Marca: PUDU
Código del producto: 10251-000002
El PUDU MT1 Vac es un robot de limpieza autónomo 3 en 1 de
gama comercial con inteligencia artificial — barre, aspira y pasa mopa —
diseñado para ..
18 029€
Sin IVA:14 900€

Marca: PUDU
Código del producto: 10260-000013
El PUDU T300 Elevator es un robot móvil autónomo (AMR)
industrial diseñado para el transporte de materiales y la gestión de cargas
pesadas en ento..
20 570€
Sin IVA:17 000€
¿Aún no tienes una cuenta?
|