









- Stock: In Stock
- Product code: GO2-EDU-ENT1
- Weight Brutto: 30.00kg
The Unitree Go2 EDU ENT U1 is a professional quadruped robot built for field inspection, perimeter security, and university research, combining Unitree's proprietary 4D LiDAR L2 — 360°×96° hemispherical coverage, minimum detection distance 0.05 m — with 12 aluminium-alloy joint motors delivering 45 N.m peak torque, a top speed of 5 m/s, and a 15000 mAh long-endurance battery. The ENT U1 payload layer adds a dual 1080P wide-angle camera system, a 30 W spotlight, red/blue warning lights, and a digital voice broadcast reaching 500–800 m.
| Peak Joint Torque | ~45 N.m |
|---|---|
| Maximum Speed | ~5 m/s (Rage Mode, lab tested) |
| Battery Life | ~2–4 h (15000 mAh long-endurance) |
| 4D LiDAR Coverage | 360° × 96° hemispherical, min 0.05 m |
The photograph below captures the Go2 EDU mid-sequence on a wet wooden outdoor deck — a real-world demonstration of the real-time balance recovery and 12-motor kinematics that define its locomotion architecture.

12 Precision Joint Motors: 40° Slopes, Steps Up to 16 cm, Rage Mode at 5 m/s
Motor Architecture and Thermal Management
Every joint on the Go2 EDU is driven by an aluminium-alloy precision motor with internal cable routing and a dedicated heat-pipe cooler per joint. Routing cables through hollow joint shafts eliminates snagging on rocks, stairs, or vegetation — a detail that determines reliability in unstructured outdoor environments. Peak torque of 45 N.m at the largest joint motor translates directly into terrain capability: the platform clears steps of 16 cm and handles ramp angles up to 40° — steeper than most standard stairways.
The articulation envelope is equally generous. Body roll spans -48° to +48°, thigh pitch from -200° to +90°, and shank from -156° to -48°. This combination allows the robot to compress from a standing footprint of 70 × 31 × 40 cm into a crouched transport posture of 76 × 31 × 20 cm — fitting through standard doorways and vehicle cargo areas without disassembly.
Below, the Go2 EDU demonstrates multi-terrain balance, standing poised on a submerged rock with a wet surface — a visual confirmation of the foot-contact force sensing that continuously modulates ground reaction forces.

Rage Mode: Full Motor Potential at 5 m/s
Standard operation runs the Go2 EDU at up to 3.7 m/s with full sensor fusion active. Rage Mode unlocks the joint motors to their hardware ceiling, reaching approximately 5 m/s with sharper steering response and stable gait across gravel, sloped terrain, and artificial turf. The 8-core high-performance CPU handles concurrent locomotion, perception, and 4G communication without thermal throttling — essential for uninterrupted patrol duty.
4D LiDAR L2: Hemispherical Terrain Intelligence at 0.05 m Minimum Range
Unitree's self-developed 4D LiDAR L2 sweeps a 360° horizontal × 96° vertical field, creating a near-spherical point cloud with a floor-level minimum detection distance of 0.05 m. That means the robot detects objects essentially at its own feet — furniture legs, curbstones, and low-lying cables that would blind conventional 2D laser sensors. The resulting perception improvement over standard single-plane scanners is approximately 200%.
The image below shows the ISS 2.0 intelligent side-follow system active outdoors, with a visualised terrain-detection overlay mapping the operator's environment in real time.

ISS 2.0: 50% Better Positioning, 30 m Follow Range
The ISS 2.0 Intelligent Side-Follow System uses wireless vector positioning technology to achieve a 50% improvement in planar positioning accuracy versus the previous generation, with a reliable operator-tracking radius exceeding 30 m in open environments. The UWB tag houses a 3-axis accelerometer and gyroscope IMU, providing attitude data that supplements the LiDAR obstacle avoidance stack. The combined result: the Go2 EDU shadows its operator through narrow corridors, uneven outdoor paths, and partially obstructed passages with no manual steering input.
SLAM: Map, Locate, Navigate Autonomously
The onboard software stack delivers a complete three-stage SLAM pipeline. Mapping generates a persistent 3D voxel environment model; positioning resolves the robot's pose within that map; the navigation module then plans and executes a collision-free path to any target waypoint. Using the dedicated mobile app, an operator constructs a 3D LiDAR point-cloud map of a site, marks waypoints, and the robot traverses them independently, adapting gait to terrain changes detected in real time.
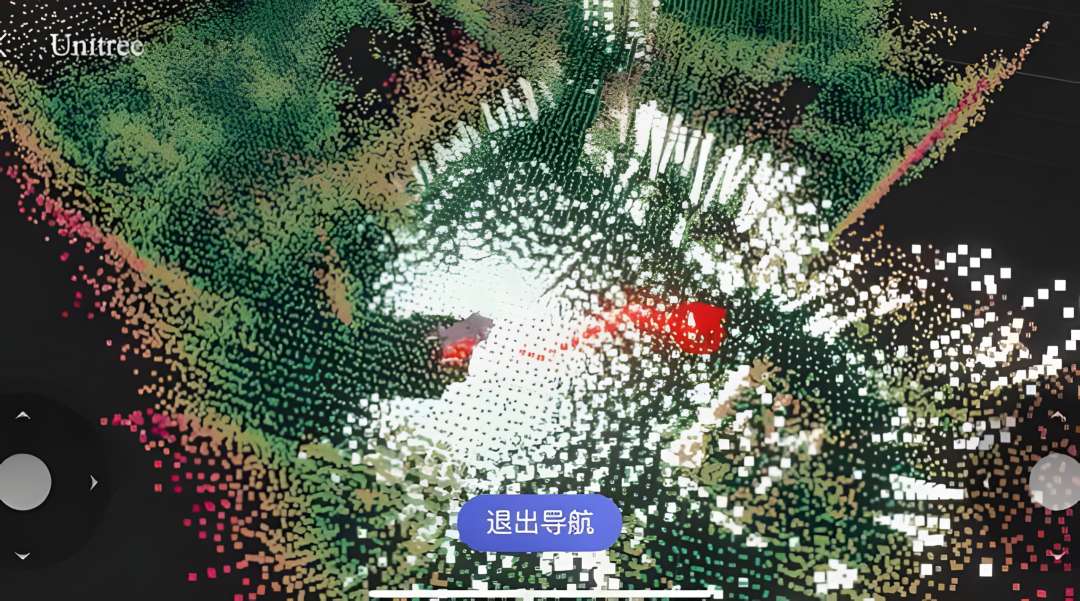
The smartphone display below shows the Unitree app rendering a real-time, colourised 3D LiDAR voxel map of an outdoor environment — built entirely on-device from L2 sensor data.
ENT U1 Inspection Payload: Cameras, Spotlight, Warning Lights, Voice Broadcast
The ENT U1 configuration transforms the Go2 EDU research platform into a field-deployable inspection and patrol unit. The close-up below reveals the Go2 EDU's front sensor cluster — the wide-angle camera and front LED that anchor both the baseline navigation system and the ENT U1's enhanced imaging payload.

Dual 1080P Imaging, 30 W Spotlight, and Police Warning Lights
The ENT U1 module mounts a dual 1080P wide-angle camera system (FOV 120°) with four high-brightness fill lights, replacing the standard depth camera with a broadcast-grade imaging solution. Video transmits at 1080P HD with latency as low as 180 ms over the 5.8G primary link; a standard network-port input simultaneously supports dual-channel 1080P streaming. The 30 W spotlight delivers 3000 lm, illuminating inspection targets in complete darkness. The red/blue police warning system (10 W) supports constant illumination, burst flash, alternating red-blue, and brightness-adjustable continuous modes — making the robot immediately identifiable as an official inspection unit in any lighting.
Digital Voice Broadcast and Dual Communication Link
The ENT U1 integrates a digital encoding/decoding voice broadcast system with a speaker propagation range of 500–800 m. Operator functions include real-time voice alerts, recorded audio playback, upload, and text-to-speech — all controllable from the explosion-proof screen remote controller. The primary link runs on 5.8G digital telemetry (integrated video and control), with a full 4G all-network connection as automatic backup to maintain reachability if the primary radio link is disrupted.
Open Development Platform: DDS, ROS2, SLAM, Optional Jetson Orin
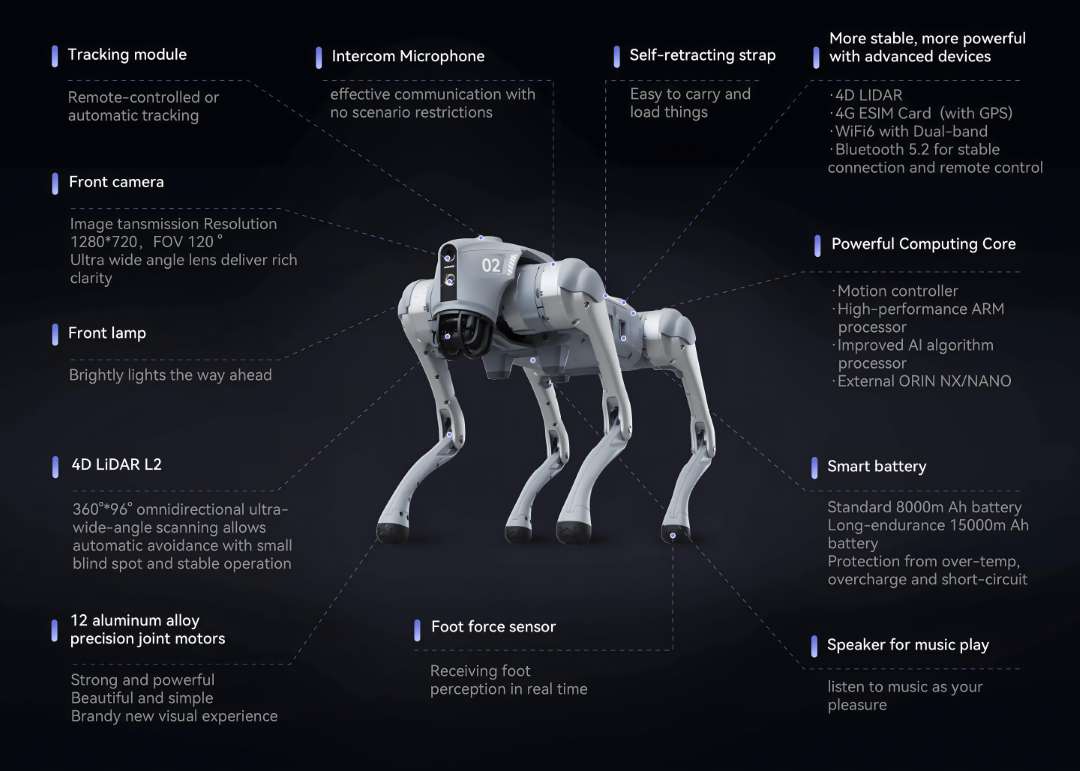
The annotated hardware diagram below maps the complete Go2 EDU ENT U1 component layout: the UWB tracking module, intercom microphone, front camera (1280×720, FOV 120°), front lamp, 4D LiDAR L2, 12 joint motors, foot-end force sensor, computing core, and the long-endurance smart battery — all integrated into the ~15 kg aluminium and high-strength engineering plastic chassis.
unitree_sdk2: DDS, ROS2, C++, Python
The EDU platform exposes a full secondary-development environment via DDS middleware (C++ and Python) with native ROS2 interface and adaptive RMW. Available service layers cover low-level motor and IMU data, high-level motion control (speed, trajectory tracking, gait switching, obstacle avoidance), GST image streaming, radar point-cloud and altitude-map retrieval, full SLAM services, and UWB positioning. This means existing ROS2 packages, sensor drivers, and visualisation pipelines transfer to the Go2 EDU with minimal rework — significant time savings for university labs and R&D teams alike.
For compute-intensive workloads, the Go2 EDU supports an optional NVIDIA Jetson Orin NX or Nano expansion module delivering 40–100 TOPS of AI inference, slotting into the robot's expansion bay without external cabling changes.
The image below shows a researcher engaging directly with the Go2 EDU at close range — a scene that reflects the platform's approachable interaction model: offline voice commands, sitting, stretching, dancing, forward somersaults, and multiple gait modes all available without code.

Technical Specifications of the Unitree Go2 EDU ENT U1
Mechanical Dimensions
| Dimension (standing) | 70 × 31 × 40 cm |
|---|---|
| Dimension (crouching) | 76 × 31 × 20 cm |
| Weight (with battery) | ~15 kg |
| Shell Material | Aluminium alloy + high-strength engineering plastics |
Electrical Parameters
| Voltage | 28–33.6 V |
|---|---|
| Maximum Working Power | ~3000 W |
Performance Parameters
| Payload (typical / max) | ~8 kg (MAX ~12 kg) |
|---|---|
| Speed (normal / max) | 0–3.7 m/s (MAX ~5 m/s) |
| Max Step Height | ~16 cm |
| Max Climb Angle | 40° |
| Basic Computing Power | 8-core high-performance CPU |
Joint Parameters
| Maximum Joint Torque | ~45 N.m |
|---|---|
| Aluminium Joint Motors | 12 |
| Range of Motion — Body | -48° ~ +48° |
| Range of Motion — Thigh | -200° ~ +90° |
| Range of Motion — Shank | -156° ~ -48° |
| Intra-Joint Electrical Routing | Yes |
| Joint Heat-Pipe Cooler | Yes |
Sensors and Perception
| 4D LiDAR | Unitree L2 — 360° × 96° FOV, min detection 0.05 m |
|---|---|
| Wireless Vector Positioning (UWB) | Yes — ISS 2.0, centimetre-level plane positioning |
| Front Camera | 1280 × 720, FOV 120° |
| Depth Camera | Yes (included in EDU; replaced by ENT U1 dual camera in this config) |
| Foot-End Force Sensor | Yes |
Connectivity
| WiFi | WiFi 6 dual-band |
|---|---|
| Bluetooth | Bluetooth 5.2 / 4.2 / 2.1 |
| 4G Module | Yes (with GPS) — supports 43 European countries |
Battery and Power
| Smart Battery Capacity | 15000 mAh (long-endurance) |
|---|---|
| Battery Life | ~2–4 h |
| Charger | 33.6 V / 9 A (fast charge) |
| Charging Pile Compatibility | Yes |
Features and Development
| Voice Function | Yes (offline voice interaction, commands, intercom, music) |
|---|---|
| ISS 2.0 Intelligent Side-Follow | Yes — 50% positioning upgrade, >30 m range |
| Secondary Development | Yes — full DDS (C++ / Python), ROS2 interface |
| SLAM Services | Yes — mapping, positioning, autonomous navigation |
| High-Performance Module (optional) | NVIDIA Jetson Orin NX / Nano — 40–100 TOPS |
| OTA Firmware Updates | Yes |
| Graphical Programming | Yes |
| 3D LiDAR Mapping (App) | Yes |
ENT U1 — Screen Remote Controller
| Display | 5.5" 1080P highlight LCD touchscreen |
|---|---|
| OS / RAM / Storage | Android 9.0 / 2 GB RAM / 16 GB |
| Dimensions (antenna retracted) | 189 × 138 × 41 mm |
| Weight | 850 g |
| Battery Capacity | 10200 mAh 7.4 V 2S lithium |
| Fast Charging | PD 20 W |
| Charge Time | 5 h (20 W fast charge) |
| Operating Endurance | 13 h |
| Interfaces | USB-A (charging), Type-C (firmware / file transfer), SIM card slot |
ENT U1 — Dual Camera Module
| Camera Module Dimensions | 106 × 25 × 41 mm |
|---|---|
| Camera Field of View | 120° |
| Camera Module Weight | 108 g |
| Power Consumption | 3 W |
| Searchlight Power / Luminous Flux | 8 W / 120–140 lm |
ENT U1 — Inspection Payload
| Main Spotlight | 30 W / 3000 lm |
|---|---|
| Warning Lights | Red/blue, 10 W — constant, burst, alternating, adjustable modes |
| Video Transmission | 1080P HD, latency ≤180 ms, 5.8G primary link |
| Voice Broadcast Range | 500–800 m |
| Communication Architecture | 5.8G primary + 4G full-network backup (auto-failover) |
Warranty
| Warranty Period | 12 months |
|---|
What's in the Box
- Unitree Go2 EDU robot (full assembly with 15000 mAh long-endurance battery)
- ENT U1 dual 1080P camera module with 4 fill lights (installed)
- ENT U1 30 W spotlight and red/blue warning light system (installed)
- ENT U1 digital voice broadcast system (installed)
- 5.5" Android 9.0 screen remote controller (explosion-proof, 10200 mAh)
- 33.6 V / 9 A fast charger
Why Choose EXPERT3D?
EXPERT3D has specialised in advanced robotics and 3D technology since 2012 — more than a decade of hands-on experience selecting, deploying, and supporting professional-grade platforms in research institutions, universities, and industrial R&D teams across Spain and Europe. We provide pre-sales technical consultation, delivery coordination, and post-sale support backed by direct manufacturer contacts. The Unitree Go2 EDU ENT U1 is a complex integrated system: our team can assist with ENT U1 configuration, SDK onboarding, and integration into existing inspection or research workflows. Contact us to discuss your specific application requirements and current availability.



























 – Advertising & Reception Robot")

