



- Disponibilidad: En stock
- Código del producto: 10250-000008
- Peso bruto: 160.00kg
El PUDU MT1 es un robot barredora autónomo con inteligencia artificial, diseñado para entornos comerciales e industriales de gran afluencia: almacenes, centros logísticos, fábricas, aeropuertos y grandes superficies de venta. Equipado con doble posicionamiento integrado LiDAR SLAM y VSLAM, reconocimiento de residuos en tiempo real, una tolva de 35 L con extracción rápida y una batería de 45 Ah con hasta 8 horas de autonomía continua, el MT1 gestiona superficies de suelo duro de hasta 100.000 m² sin necesidad de supervisión humana constante.
El vídeo oficial de presentación del producto que se muestra a continuación ilustra el alcance operativo completo del MT1 — desde la navegación autónoma y la limpieza spot con IA hasta el modo de intervención manual y la integración IoT con ascensores, puertas de acceso electrónicas y la plataforma de gestión de flota PUDU Link.
| Capacidad de la tolva | 35 L (extracción rápida modular) |
|---|---|
| Autonomía máxima | hasta 8 h (batería de 45 Ah) |
| Anchura de limpieza efectiva | ~70 cm (con cepillos laterales) |
| Navegación | LiDAR SLAM + VSLAM (doble posicionamiento integrado) |
La imagen a continuación muestra al PUDU MT1 avanzando por un corredor de almacén moderno e iluminado — cepillos laterales desplegados, franja LED de estado activa, cubriendo todo el ancho del pasillo sin intervención manual alguna.

Diseñado para instalaciones que no se detienen
Los robots de limpieza de menor envergadura no están a la altura de los entornos industriales. El MT1, con un chasis de 840 × 600 × 490 mm y un peso aproximado de 65 kg, es un equipo de grado profesional capaz de absorber las exigencias físicas de las operaciones diarias en logística y almacenamiento. La carcasa de PC+ABS soporta los golpes y vibraciones de las plantas de producción más activas sin comprometer la integridad estructural.
Las aplicaciones objetivo abarcan todo el espectro de entornos de suelo duro con gran huella: centros de almacenamiento y distribución, fábricas de automoción y electrónica, tiendas de materiales de construcción y decoración, aeropuertos y estaciones de transporte. La cobertura alcanza hasta 100.000 m² por despliegue mediante operación programada en múltiples turnos con recarga autónoma de batería entre ciclos.
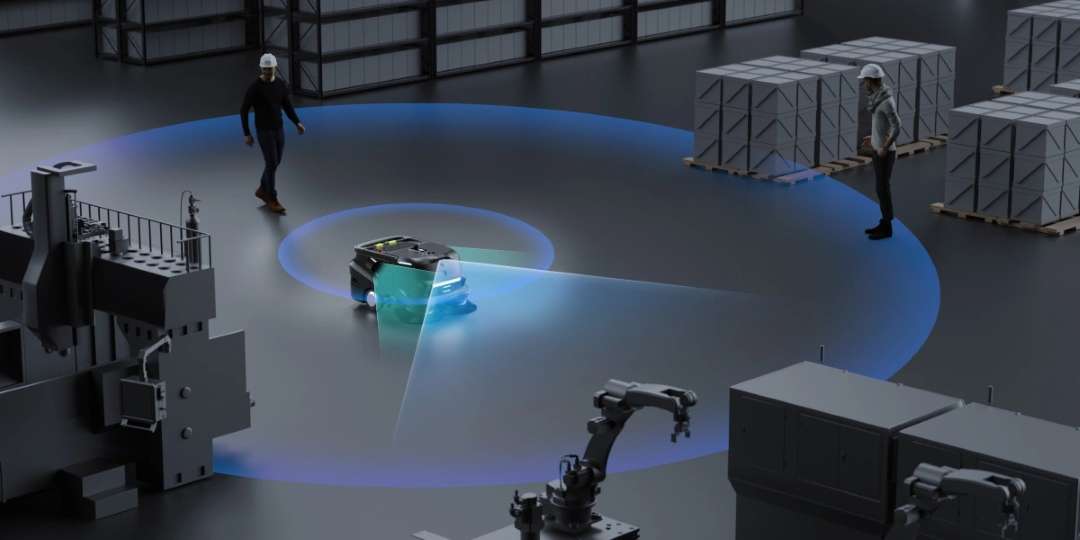
El render siguiente visualiza el MT1 en modo autónomo en una planta de producción: el LiDAR emite anillos de detección azules mientras el robot navega alrededor de trabajadores y maquinaria activos — una demostración en tiempo real del perímetro de seguridad multisensor de 360° que protege al personal y a los equipos durante las limpiezas nocturnas sin supervisión.
LiDAR SLAM + VSLAM: navegación de precisión en espacios complejos
La calidad de la navegación determina si un robot autónomo limpia de manera eficiente o simplemente recorre el espacio sin orden. El MT1 fusiona dos sistemas de posicionamiento independientes en paralelo: una unidad de LiDAR SLAM para cartografía planar de alta precisión y una cámara VSLAM (localización y mapeado simultáneo visual) para la localización basada en características a alturas donde el LiDAR pierde contexto. Esta fusión gestiona obstáculos dinámicos — transpaletas, peatones, particiones temporales — que los sensores exclusivos de plano suelo no detectan con fiabilidad.
Cuando el entorno cambia — nueva estantería, equipos reubicados, mercancía de temporada — el MT1 actualiza su mapa interno sin necesidad de una sesión de reconfiguración completa. La velocidad de crucero es ajustable de 0,2 m/s a 1,2 m/s, lo que permite equilibrar la velocidad de cobertura con la eficacia de limpieza según la zona de la instalación.
Arquitectura de seguridad multisensor 3D
Más allá de la navegación, el MT1 emplea varias cámaras de profundidad RGB-D, sensores láser lineales y visión asistida por luz de relleno para construir un modelo tridimensional de su entorno inmediato. La capa de reconocimiento de obstáculos con IA identifica categorías específicas de objetos — felpudos, cajas de calzado, bases de equipos — y genera trayectorias de esquiva en tiempo real. El robot no simplemente se detiene al detectar algo; evalúa el tipo de obstáculo y selecciona la respuesta adecuada.
El primer plano siguiente muestra el conjunto de sensores delantero superior: el objetivo de la cámara VSLAM en posición central, la pantalla de estado PUDU y la interfaz de control — el núcleo perceptivo del MT1 integrado en una carcasa compacta que no interfiere con la zona de barrido.

Reconocimiento de residuos con IA: ningún desecho pasa desapercibido
El MT1 no es simplemente una barredora programada que actúa a ciegas. Su sistema de cámaras con IA analiza continuamente el suelo por delante, clasificando los residuos por categoría: botellas de plástico, latas de aluminio, hojas secas, papel y cartón arrugados, colillas y bolsas de plástico. La precisión del reconocimiento mejora con el tiempo mediante actualizaciones del modelo de aprendizaje profundo proporcionadas por PUDU — el sistema evoluciona con la exposición en campo y la ampliación continua de la base de datos.
Cuando el sistema detecta una concentración elevada de residuos, activa el modo AI Ultra Spot Cleaning, aumentando la densidad de pasadas sobre esa zona hasta en un 500% respecto a la cobertura de patrulla estándar. Esta respuesta dirigida permite que un solo robot mantenga estándares de limpieza de auditoría en una nave logística de 10.000 m² — no barriendo todo con mayor intensidad, sino enfocando la intensidad correcta en las zonas adecuadas en el momento oportuno.
La imagen siguiente muestra el campo de visión de la cámara frontal del MT1 durante el reconocimiento activo con IA: un cono de detección se despliega sobre una muestra de residuos variados — botellas, latas, materia orgánica, papel y envases — con cada categoría identificada antes de que el robot llegue a ella.

Anchura de limpieza de 70 cm: arquitectura de doble cepillo
El sistema de limpieza del MT1 combina un cepillo rodillo giratorio (cepillo principal) con dos cepillos laterales giratorios. La anchura de limpieza efectiva combinada alcanza aproximadamente 70 cm — suficiente para limpiar un pasillo de palets estándar en una sola pasada. El cepillo rodillo gestiona los residuos de mayor volumen: fragmentos de cartón, film de plástico, hojas, botellas. Los cepillos laterales barren las zonas de borde y esquina, dirigiendo el material hacia el canal de aspiración central.
Se pueden seleccionar dos marchas de cepillo: Potente para acumulaciones importantes de residuos y Eco para material ligero y disperso, donde una velocidad de cepillo elevada tiende a dispersar en lugar de recoger. Ambos cepillos tienen una vida útil de 6 a 12 meses de uso diario antes de su sustitución, con un desenredo diario recomendado para eliminar pelos e hilos acumulados.
El perfil lateral siguiente muestra el conjunto de barrido delantero del MT1: el cepillo lateral completamente extendido, la franja LED de acento azul a nivel de chasis, y la carcasa angular de PC+ABS que define la estética industrial y funcional de la plataforma.

Contención activa del polvo
Barrer sin contención del polvo traslada el problema en lugar de resolverlo. El sistema de gestión activa del polvo del MT1 utiliza ventilación de presión negativa de alto caudal para aspirar las partículas en suspensión a través de la toma y atraparlas en el filtro de aire, evitando la dispersión secundaria sobre la superficie recién limpiada. El mantenimiento no requiere herramientas: se tira del mango de extracción de polvo del panel lateral para limpiar el filtro — una operación que lleva menos de 30 segundos y se recomienda cada dos días en entornos con alta concentración de polvo.
Tolva de 35 L con extracción rápida
Una tolva de 35 L es genuinamente amplia para el tamaño de esta plataforma. El mecanismo de extracción rápida de un solo toque requiere presionar el botón de pestillo verde del panel lateral: la tolva se desliza hacia afuera, se vacía el contenido y se vuelve a insertar sin herramientas, sin contacto con los residuos y sin interrumpir la cola de tareas programadas.
El primer plano siguiente muestra el botón de pestillo verde de extracción rápida integrado en el panel lateral — el mecanismo de un solo toque que reduce el tiempo diario de vaciado de la tolva a menos de 30 segundos.

Tras un turno de limpieza completo, la tolva contiene una carga representativa de lo que genera una instalación industrial típica: fragmentos de cartón, botellas de plástico, film de embalaje y residuos orgánicos mixtos. El diseño modular permite vaciarla en segundos sin herramientas — la tolva se desliza hacia afuera, se vacía y encaja de vuelta con un clic.

Dos modos, un robot: operación manual y automática
No todos los escenarios de limpieza requieren operación completamente autónoma. El MT1 admite tres modos de funcionamiento distintos sin cambios de configuración ni hardware adicional: limpieza manual, automática y programada.
En el modo de limpieza manual, el operario levanta el manillar retráctil y empuja el robot mientras los sistemas de cepillo y aspiración funcionan a la marcha seleccionada (Baja, Media o Alta). La plataforma actúa como una barredora mecánica motorizada — más rápida que una escoba manual, sin necesidad de mapa ni marcador de posicionamiento. Es ideal para la limpieza puntual de derrames o zonas no incluidas en el plan de limpieza autónomo.
La fotografía siguiente muestra la operación manual en un entorno logístico: el operario guía el MT1 sobre una superficie de hormigón cubierta de hojas y papel arrugado — conjunto de cepillos totalmente desplegado, sistema de aspiración en marcha.

El mecanismo del manillar es en sí mismo un punto de diseño destacable. Se bloquea tanto en posición levantada (para empuje manual) como en posición bajada (para operación autónoma), y sirve además como soporte para la pantalla LCD de 10,1 pulgadas desmontable. La pantalla puede retirarse del robot y sostenerse en la mano o sujetarse al manillar — lo que resulta muy práctico para supervisar una tarea a distancia sin necesidad de agacharse hacia la pantalla montada en el robot. La imagen siguiente muestra el manillar en proceso de elevación, con el punto de conexión de la pantalla y el botón de parada de emergencia visibles en el panel superior.

Operación continua 24/7: batería, carga rápida y autodocking
La batería de litio de 45 Ah ofrece una autonomía de 4 a 8 horas en función del modo de operación, las condiciones del suelo y el nivel de uso de los cepillos. En condiciones de marcha estándar desde el 100% hasta el 10% de carga, un ciclo completo cubre un turno de trabajo completo. La carga rápida a través del cargador dedicado de 29,2 V / 20 A repone la carga operativa en aproximadamente 3 horas — suficiente para completar tres ciclos de limpieza completos en 24 horas cuando se combina con la estación de carga autónoma.
El autodocking elimina la necesidad de que el personal monitorice los niveles de batería. Cuando la carga desciende por debajo del umbral, el MT1 navega de forma autónoma hasta la estación de carga, se alinea con los electrodos de contacto y comienza la recarga sin intervención del operario. Una vez cargado, puede reanudar la tarea interrumpida desde el punto de parada. La vista superior siguiente muestra el MT1 completamente anclado en su estación — pantalla mostrando el 100%, electrodos de contacto enganchados, sistema listo para el siguiente ciclo.

Especificaciones técnicas del PUDU MT1
Dimensiones físicas
| Modelo | MTBC01 |
|---|---|
| Dimensiones (L × A × H) | 840 × 600 × 490 mm |
| Peso | ~65 kg |
| Material de la carcasa | PC+ABS |
| Pantalla | LCD de 10,1 pulgadas (desmontable) |
Rendimiento de limpieza
| Capacidad de la tolva | 35 L |
|---|---|
| Anchura de limpieza (con cepillos laterales) | ~70 cm |
| Capacidades de limpieza | Trozos de papel, film de plástico, hojas, botellas, latas, residuos mixtos |
| Velocidad de crucero | 0,2–1,2 m/s (ajustable) |
| Ruido de trabajo | < 75 dB |
Movilidad
| Anchura mínima de paso | 75 cm |
|---|---|
| Anchura mínima de giro | 110 cm |
| Altura máxima superable | 20 mm |
| Hueco máximo superable | 30 mm |
| Ángulo máximo de subida (sin limpieza) | 8° |
| Pendiente máxima de limpieza | 3° |
Navegación y detección
| Método de navegación | LiDAR SLAM + VSLAM integrado (SLAM visual) |
|---|---|
| Sensores de detección de obstáculos | Cámaras de profundidad RGB-D ×2, sensores láser lineales ×2, cámara VSLAM, LiDAR |
| Funciones con IA | Reconocimiento de residuos, esquiva de obstáculos, limpieza spot ultra, detección de manchas, exención IA |
Alimentación y batería
| Tensión de funcionamiento | DC 23–29,2 V |
|---|---|
| Entrada de alimentación | AC 100–240 V, 50/60 Hz |
| Salida de alimentación (máx.) | 29,2 V, 20 A |
| Capacidad de la batería | 45 Ah |
| Tiempo de carga | ~3 h |
| Autonomía | 4–8 h |
| Grado de protección | IPX3 |
Conectividad y programa
| Sistema operativo | Android |
|---|---|
| Comunicación | 4G, Wi-Fi, Bluetooth, LoRa o 2,4G (opcional) |
| Aplicación móvil | Compatible |
| Modo de operación | Manual / Automático / Programado |
| Carga autónoma | Compatible (requiere estación de carga MT1) |
| Integración IoT | Ascensores, puertas electrónicas, gestión de flota PUDU Link |
Condiciones ambientales
| Temperatura de trabajo | 0–40 °C |
|---|---|
| Temperatura de almacenamiento | -20–70 °C |
| Humedad de trabajo | ≤ 90% HR |
| Altitud de trabajo | < 2000 m |
| Superficies de aplicación | Hormigón pulido, resina epoxi, caucho, ladrillo ordinario, baldosas cerámicas |
Contenido del paquete
- Unidad principal PUDU MT1 × 1
- Cargador × 1
- Cepillos laterales × 2
- Cepillo rodillo × 1
- Manual de usuario × 1
- Certificado de conformidad × 1
- Marcador de posicionamiento × 1
- Banderola de advertencia × 1
Cómo iniciar su primera tarea de limpieza autónoma en el PUDU MT1
Este procedimiento describe cómo preparar y lanzar una tarea de limpieza autónoma en el PUDU MT1 para el primer uso, desde la carga de la batería hasta la ejecución de la tarea.
Paso 1: Cargar la batería al 100% antes del primer uso
Conecte el cable del cargador a la toma de carga lateral del robot, o posicione el robot frente a la estación de carga MT1 para que los electrodos de contacto se alineen. Cargue al 100% antes del primer uso para establecer la línea base de capacidad total de la batería. La pantalla muestra el porcentaje de carga en tiempo real.
Paso 2: Encender el robot
Mantenga pulsado el botón de encendido durante aproximadamente 3 segundos. La franja LED inferior se iluminará en azul, confirmando el arranque satisfactorio. Espere a que se complete la secuencia de inicialización del sistema antes de interactuar con la pantalla.
Paso 3: Bajar el manillar
Pliegue el manillar hacia abajo hasta la posición bajada. Las tareas de limpieza autónoma no pueden iniciarse con el manillar levantado — el robot comprueba la posición del manillar como precondición de seguridad antes de lanzar cualquier operación automática.
Paso 4: Posicionar frente al marcador visual
Empuje el robot hasta una posición directamente frente al marcador de posicionamiento visual instalado en la instalación (o debajo de él, según su ubicación). La cámara VSLAM lee el marcador para localizar el robot en su mapa almacenado. La



















 – Robot de Publicidad y Hostes")


