



- Disponibilidad: En stock
- Código del producto: 10170-000015
- Peso bruto: 75.00kg
El PUDU PuduBot 2 es un robot de reparto autónomo para interiores diseñado para entornos comerciales de alta actividad: restaurantes, hoteles, hospitales, supermercados, oficinas y centros comerciales. Con una altura de 1290 mm, tres bandejas metálicas desmontables y regulables en altura con una capacidad nominal de 10 kg por nivel, navega sin marcadores gracias al sistema de doble LiDAR + posicionamiento visual VSLAM a velocidades de hasta 1,2 m/s, respaldado por una batería LFP de 25 Ah que proporciona entre 12 y 15 horas de funcionamiento continuo por carga.
| Autonomía de la batería | 12–15 h (sin carga), batería LFP 25 Ah |
|---|---|
| Capacidad de bandeja | 10 kg/nivel (nominal), 13 kg/nivel (máximo) × 3 bandejas |
| Sistema de navegación | VSLAM + Doble LiDAR + esquiva de obstáculos 3D |
| Velocidad máxima de crucero | 1,2 m/s (ajustable de 0,1 a 1,2 m/s) |
La imagen siguiente muestra el PuduBot 2 en su configuración estándar de tres bandejas con la pantalla táctil LCD de 10,1" — una arquitectura ergonómica diseñada para atravesar pasillos con una anchura mínima de 80 cm.

Seis modos de operación para cada escenario comercial
Pocos robots de reparto igualan la versatilidad operativa del PuduBot 2. Seis modos de trabajo diferenciados cubren el espectro completo de aplicaciones comerciales sin necesidad de cambios de hardware:
- Modo Reparto de Platos — entrega multimesa con asignación de destino por bandeja; el personal pulsa «Listo» al recoger el pedido y el robot continúa al siguiente punto.
- Modo Reparto — transporte punto a punto con retorno automático a la estación de carga tras completar la tarea.
- Modo Patrulla — recorrido autónomo por una ruta fija para publicidad o recepción, con puntos de pausa configurables (1–600 s por parada).
- Modo Directo — transporte unidireccional; el robot permanece estacionario en el destino hasta que el personal lo libera.
- Modo Cumpleaños — entrega conmemorativa acompañada de reproducción de música totalmente personalizable.
- Modo Recogida — retirada de platos o bandejas usados con paradas de tránsito opcionales antes del punto de recogida final.
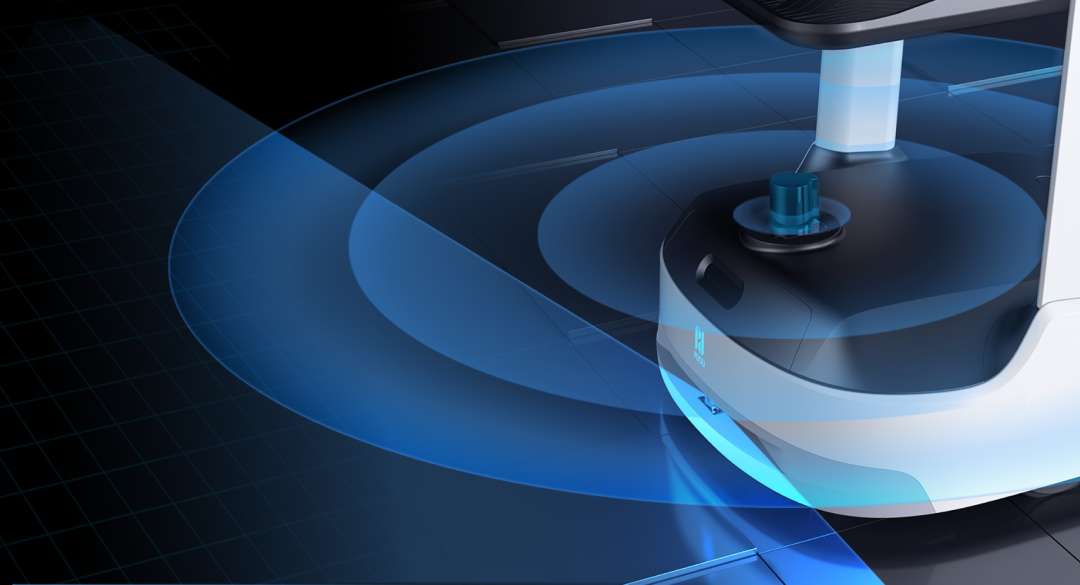
Los sensores de visión de profundidad 3D del PuduBot 2 generan un campo de percepción espacial continuo, detectando obstáculos de tan solo 2 cm dentro de un radio de 1 m y recalculando la ruta en tiempo real. La imagen siguiente muestra al robot en servicio activo en un bar, con el sensor VSLAM proyectando su cono de detección mientras escanea el entorno.

Navegación con doble LiDAR: percepción ambiental en 360°
El sistema de navegación del PuduBot 2 combina tres capas sensoriales complementarias. Un LiDAR primario a nivel de la base gestiona el mapeo del plano horizontal; un LiDAR secundario amplía la cobertura hacia arriba para detectar obstáculos colgantes como bordes de mesa o patas de silla. El sistema VSLAM (Localización y Mapeado Simultáneos por Visión) lee características naturales del techo para anclar las estimaciones de posición — sin pegatinas reflectantes ni modificaciones en el techo. PUDU SLAM reduce el tiempo de instalación inicial en un 75% respecto a los sistemas con marcadores y funciona de forma fiable en espacios con alturas de techo de hasta 30 m.
La visualización siguiente muestra la base del PuduBot 2 con el radio de escaneado de su LiDAR representado como arcos concéntricos azules — el campo de detección omnidireccional que mantiene al robot informado de su entorno en todo momento.
Coordinación multirrobot y atraque de precisión
Para instalaciones con varios robots en funcionamiento simultáneo, el PuduBot 2 ofrece tres modos de atraque: uno a uno (puesto de recogida fijo por robot), modo libre (selección por prioridad del puesto más cercano) y modo espera (standby temporal hasta que se libere un puesto de atraque). Los robots que operan en paralelo requieren una anchura de pasillo mínima de 2 m para cruce frontal y mantienen 35 cm de separación entre unidades en posición de espera.
Chasis de aluminio de grado aeronáutico: la ingeniería interior
La imagen de corte transversal siguiente revela la estructura de aluminio mecanizado de precisión en el interior de la base del PuduBot 2, que aloja los motores de tracción, el conjunto de sensores y la batería. La carcasa exterior combina polímeros PC+ABS con elementos estructurales de aluminio, ofreciendo resistencia al impacto sin incrementar el peso operativo de 39 kg del robot.
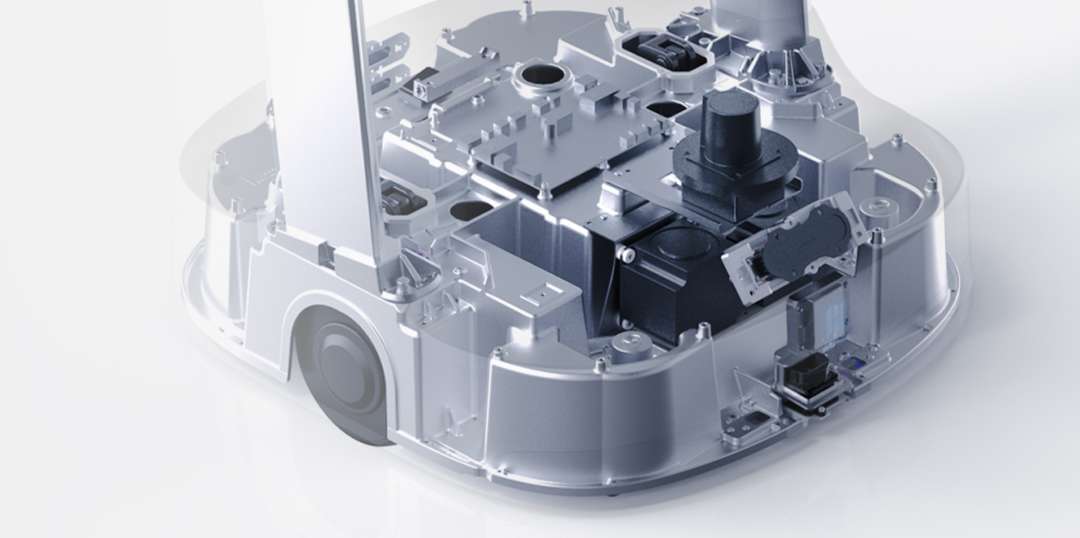
La geometría de suspensión optimizada y la distribución equilibrada de masas proporcionan una mejora del 30% en la estabilidad de conducción respecto a la generación anterior. El robot supera irregularidades del suelo de hasta 10 mm de altura y pendientes de hasta 5°, cubriendo toda la variedad de superficies presentes en entornos de hostelería y comercio.
Batería LFP de 25 Ah y estación de carga automática
El PuduBot 2 funciona con una batería de fosfato de hierro y litio (LFP) de 25 Ah — una química seleccionada por su estabilidad térmica y superior longevidad de ciclos frente a las celdas de litio-ion convencionales. En condiciones sin carga, la autonomía alcanza entre 12 y 15 horas; la recarga completa desde cero tarda aproximadamente 4 horas a 29,4 V / 8 A. Cuando el nivel de batería desciende al umbral configurado por el usuario (ajustable entre el 5% y el 50%), el robot navega de forma autónoma hasta la estación de carga y atraca sin intervención del personal.
La imagen de perfil lateral siguiente muestra el PuduBot 2 alineado con precisión frente a su estación de carga automática dedicada, con las placas de electrodos del robot haciendo contacto de forma autónoma con los conectores de la estación.

La vista transparente del chasis siguiente permite ver el bloque de batería LFP en el interior de la base — el gran bloque azul posicionado en el centro para una distribución óptima del peso, flanqueado por los conjuntos de ruedas de tracción y los componentes de suspensión.

Ecosistema PuduOS: llamadas en cuatro vías y gestión remota
El PuduBot 2 funciona con PuduOS — un sistema operativo basado en Android diseñado específicamente para la gestión de flotas robóticas que centraliza la navegación, la cola de tareas, la integración de llamadas y las actualizaciones de programa OTA en una única interfaz. El personal puede llamar al robot o recibir notificaciones de llegada a través de cuatro canales independientes:
- PuduLink — aplicación móvil con monitorización del estado en tiempo real y llamadas (requiere conexión de red)
- Reloj inteligente 4G — dispositivo de muñeca que muestra el destino de la entrega y la confirmación de llegada
- PuduBeeper — integración de pager por botón (requiere conexión de red)
- Pudu Pager — funciona mediante pasarela local, operativo sin internet; gestiona hasta 48 tareas simultáneas con un intervalo de validez de 5 minutos por tarea
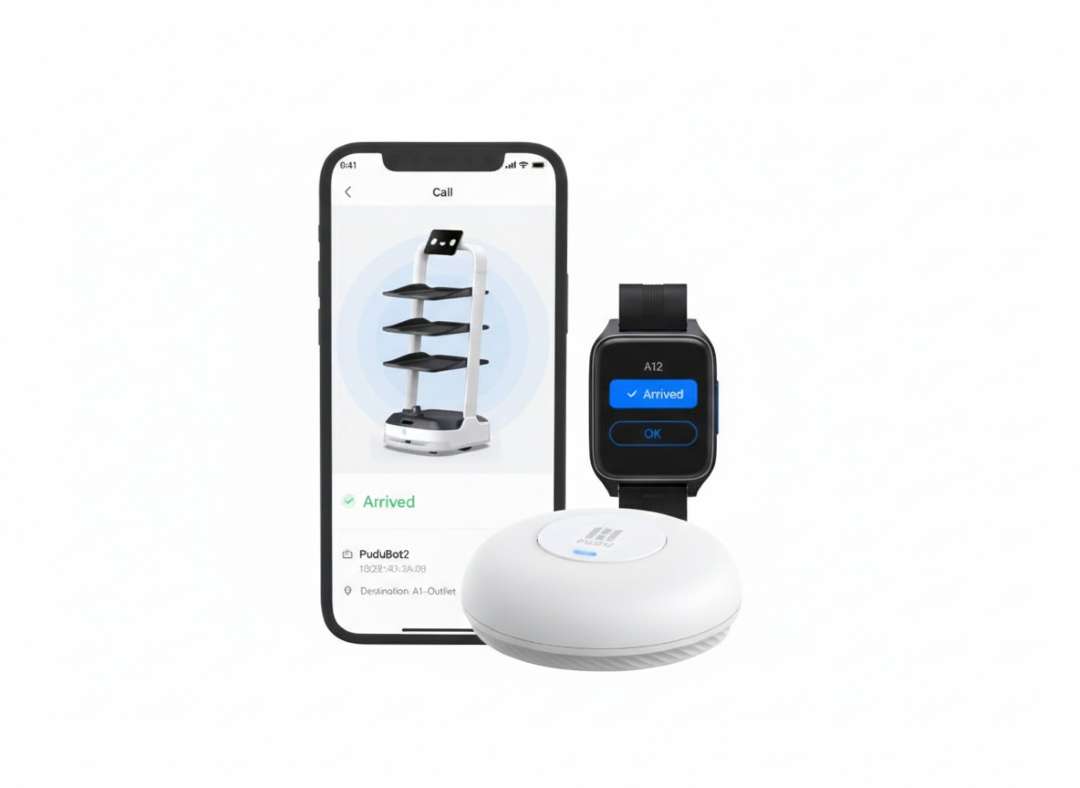
La imagen siguiente muestra el ecosistema de llamadas PuduLink completo: la app en el smartphone con el estado «Llegado», el reloj inteligente 4G confirmando la entrega en la mesa A12 y la unidad de pasarela Pudu Pager — todos ellos comunicándose simultáneamente con una misma unidad PuduBot 2.
PuduOS va más allá del control de tareas: incluye gestión de biblioteca de música (hasta 20 pistas personalizadas importadas mediante lectura de código QR), perfiles de velocidad, cambio de mapa y franjas horarias programadas de recarga automática. El lenguaje de diseño que se muestra a continuación prioriza la operación táctil por parte del personal sin formación técnica específica.

Pantalla de 10,1", cámara trasera y conectividad 4G
El modelo PuduBot 2 PDFD22 incorpora una pantalla táctil LCD de 10,1" para la selección de tareas, visualización del estado y contenidos de señalización digital opcional — convirtiendo al robot también en una plataforma de publicidad móvil. Una cámara trasera situada justo debajo de la pantalla proporciona contexto visual para la verificación de navegación y mapeo. Una ranura para tarjeta SIM 4G habilita la conectividad de red móvil para la gestión remota y las llamadas PuduLink en entornos con cobertura Wi-Fi limitada.
El primer plano siguiente muestra la parte inferior del panel LCD de 10,1" con el objetivo de la cámara trasera claramente visible, montado en la unión entre la carcasa de la pantalla y el arco superior de soporte del robot.

Fiable en entornos reales
Diseñado principalmente para uso en interiores sobre superficies planas, la arquitectura de sensores y las capacidades del chasis del PuduBot 2 permiten también su despliegue en zonas exteriores cubiertas, pasillos de edificios y espacios comerciales semiabiertos. La imagen siguiente captura al robot navegando por una zona peatonal exterior y pasando junto a una persona que pasea a dos perros — una demostración en entorno real de la detección y esquiva de obstáculos dinámicos múltiples.

Especificaciones técnicas del PUDU PuduBot 2
Dimensiones físicas y construcción
| Modelo de producto | PDFD22 |
|---|---|
| Dimensiones generales (L × An × Al) | 580 mm × 535 mm × 1290 mm |
| Peso total | 39 kg |
| Material de la carcasa | PC+ABS / Aleación de aluminio |
| Grado de protección IP | IP40 |
Movilidad y navegación
| Método de navegación | VSLAM, LiDAR, fusión VSLAM + LiDAR |
|---|---|
| Velocidad de crucero | 0,1–1,2 m/s (ajustable) |
| Velocidad máxima en Modo Estable | 0,4 m/s |
| Anchura mínima de paso | 80 cm |
| Ángulo máximo de subida | 5° |
| Altura máxima superable | 10 mm |
| Hueco máximo superable | 15 mm |
| Altura máxima de techo (VSLAM) | 30 m |
| Precisión de aparcamiento | 5–10 cm respecto al punto de llegada |
| Puntos de arranque máximos por mapa | 16 |
Sistema de bandejas
| Número de bandejas (estándar) | 3 (desmontables, altura ajustable) |
|---|---|
| Dimensiones de bandeja | 520 mm × 435 mm |
| Carga de bandeja — nominal | 10 kg por nivel |
| Carga de bandeja — máxima | 13 kg por nivel |
| Separación entre bandejas | Ajustable |
| Material de las bandejas | Metal |
Alimentación y batería
| Capacidad de la batería | 25 Ah (LFP) |
|---|---|
| Autonomía (sin carga) | 12–15 h |
| Tiempo de carga | ~4 h |
| Tensión de funcionamiento | DC 23–29,4 V |
| Tensión de entrada | AC 100–240 V, 50/60 Hz |
| Tensión de salida | 29,4 V, 8 A |
| Estación de carga automática | Sí — atraque autónomo |
Pantalla y audio
| Pantalla de cabeza | 10,1" LCD |
|---|---|
| Pantalla publicitaria opcional | 32" (accesorio opcional) |
| Potencia del altavoz | 10 W × 2 estéreo |
| Formatos de audio compatibles | MP3, WAV, FLAC, AAC, PCM, WMA, APE |
| Capacidad de biblioteca musical | Hasta 20 pistas (importación por código QR) |
Conectividad e interfaces
| Comunicación inalámbrica | Wi-Fi, 4G (ranura para tarjeta SIM) |
|---|---|
| Compatibilidad con puerta Bluetooth | Sí |
| Puerto de expansión | 1 × USB Tipo C |
| Ecosistema de llamadas | PuduBeeper, PuduLink, Reloj 4G, Pudu Pager |
| Tareas simultáneas máximas (pager) | 48 |
Programa y sistema operativo
| Sistema operativo | Android (PuduOS) |
|---|---|
| Programa de navegación | PUDU SLAM (sin marcadores) |
| Modos de trabajo | Reparto de Platos, Reparto, Patrulla, Directo, Cumpleaños, Recogida |
| Reducción de tiempo de instalación (PUDU SLAM) | 75% respecto a sistemas con marcadores |
| Actualizaciones OTA | Sí |
| Modos de atraque | Uno a uno, Modo libre, Modo espera |
Condiciones ambientales
| Temperatura de funcionamiento | 0 °C a 40 °C |
|---|---|
| Humedad de funcionamiento | ≤ 85% HR |
| Temperatura de almacenamiento | -40 °C a 65 °C |
| Altitud de funcionamiento | < 2000 m |
| Grado de protección IP | IP40 |
| Requisito de superficie | Interiores, superficies planas y lisas |
Contenido del paquete
- Robot de reparto PUDU PuduBot 2 × 1 (modelo PDFD22, pantalla LCD 10,1")
- Manual de usuario × 1
- Certificado de calidad × 1
- Cargador × 1
Cómo encender y despachar el PUDU PuduBot 2
Este procedimiento describe la secuencia completa de arranque del PuduBot 2, desde la verificación de la batería y el interruptor principal hasta el despacho de la primera tarea autónoma.
Paso 1: Verificar la posición del interruptor principal
Localice el interruptor principal en la base del robot y confirme que está en la posición "I" (ENCENDIDO). Este interruptor controla la alimentación principal y debe estar activo antes de cargar o encender el robot.
Paso 2: Colocar el robot en el punto de arranque
Mueva el robot al punto de arranque designado — preferiblemente bajo un área del techo con características visuales bien definidas para la inicialización del VSLAM. La etiqueta de arranque debe estar fijada en el suelo de dicho punto. Se pueden configurar hasta 16 puntos de arranque por mapa.
Paso 3: Encender el robot
Pulse y mantenga pulsado el botón de encendido durante 1 segundo. La tira de luz se vuelve azul para confirmar el arranque correcto. La interfaz PuduOS, los sensores de navegación y los módulos de comunicación se inicializan automáticamente.
Paso 4: Asignar una tarea y despachar
En la pantalla táctil LCD de 10,1", seleccione el modo de trabajo deseado (p. ej., Reparto). Coloque el artículo en la bandeja correspondiente, seleccione el identificador de mesa o destino en pantalla y pulse «Iniciar» para despachar el robot de forma autónoma.



















 – Robot de Publicidad y Hostes")


