







- Disponibilidad: En stock
- Código del producto: 10080-000097
- Peso bruto: 75.00kg
El PUDU SwiftBot es un robot de servicio comercial de interior diseñado para la entrega autónoma de alimentos, el transporte de artículos y la interacción con los clientes en restaurantes, hoteles, hospitales y edificios de oficinas. Dos configuraciones cubren necesidades operativas distintas: SWFD01 incorpora bandejas abiertas para el servicio de mesa estándar, mientras que SWFD11 añade una puerta de compartimento automática para flujos de entrega cerrados. Ambos modelos transportan hasta 45 kg en tres bandejas, navegan mediante posicionamiento SLAM integrado de LiDAR y visión, y mantienen de 10 a 24 horas de operación continua por carga.
| Carga útil máxima | 45 kg (3 bandejas × 15 kg/bandeja) |
|---|---|
| Autonomía de la batería | 10–24 h |
| Sistema de navegación | LiDAR + visual SLAM integrado |
| Velocidad de crucero | 0,5–1,2 m/s (ajustable) |
La imagen a continuación muestra el SwiftBot SWFD11 en su postura operativa estándar: las puertas del compartimento cerradas protegen el contenido durante el transporte, mientras que la expresiva pantalla LCD y la tira de luz azul comunican el estado del robot al personal y a los clientes próximos.

El marco de entrega 5-S: rendimiento con cifras concretas
Pudu Robotics cuantifica el impacto operativo del SwiftBot a través de cinco pilares. Swift (rápido): en entornos de restauración, el despliegue de SwiftBot reduce la congestión humano-robot en un 50% y aumenta la velocidad de operación de las máquinas en un 30%. Stable (estable): un sistema híbrido de suspensión variable adaptativa de auto-nivelación combinado con un algoritmo de estabilización mejora la estabilidad de entrega en un 20%, lo que resulta decisivo para sopas, bebidas y platos que no toleran vibraciones. Safe (seguro): la tecnología de detección humana identifica grupos especiales como personas mayores y niños, ajustando el comportamiento de aproximación en consecuencia. Smart (inteligente): la interacción multimodal combina comandos de voz, entrada táctil y proyección láser en una experiencia coherente. Sociable: el robot se comporta con cortesía cerca de los clientes, cediendo el paso, saludando y comunicando su intención.
La infografía siguiente recoge los cinco pilares de rendimiento con sus valores cuantificados, ofreciendo una referencia rápida para equipos de compras que evalúen SwiftBot frente a otras plataformas de la competencia.

Navegación SLAM omnidireccional y seguridad con peatones
El sistema de navegación del SwiftBot fusiona LiDAR frontal y trasero con cámaras de posicionamiento visual en un único modelo SLAM que actualiza la posición del robot de forma continua. El resultado práctico: una ruta autónoma fiable en interiores concurridos y dinámicos sin necesidad de cinta reflectante ni marcas en el suelo. Una anchura de paso mínima de 80 cm es suficiente para el desplazamiento en línea recta y el giro, lo que se adapta a la mayoría de pasillos de restaurante y corredores de hotel.
La interacción con peatones se gestiona mediante un algoritmo de detección de grupos que activa tres estrategias de cesión de paso: lateral para peatones de frente, lateral para peatones en paralelo, y retroceso cuando un peatón frontal no puede evitarse lateralmente. El render siguiente muestra al robot proyectando flechas direccionales en el suelo mientras cede el paso a un cliente — una señal visual que no requiere ningún nivel de volumen de altavoz en entornos silenciosos.

Seis modos operativos para cualquier tipo de establecimiento
Una sola unidad SwiftBot alterna entre seis modos de servicio distintos a través de la interfaz Android a bordo, sin necesidad de cambios de hardware. El modo de entrega de alimentos dirige el robot a múltiples mesas en una secuencia configurable. El modo de entrega gestiona el transporte de artículos o paquetes a destinos especificados. El modo crucero sigue un recorrido en bucle de forma programada, útil para bufés y vestíbulos de hotel. El modo guía acompaña a los clientes hasta su mesa o habitación. El modo cumpleaños activa una secuencia celebratoria especial con proyecciones e interacción de audio. El modo interacción convierte el robot en un quiosco de atención estacionario.
El siguiente icono-resumen muestra los seis modos de un vistazo, tal como aparecen en la interfaz de gestión del SwiftBot.
Proyección láser galvo e interacción multimodal
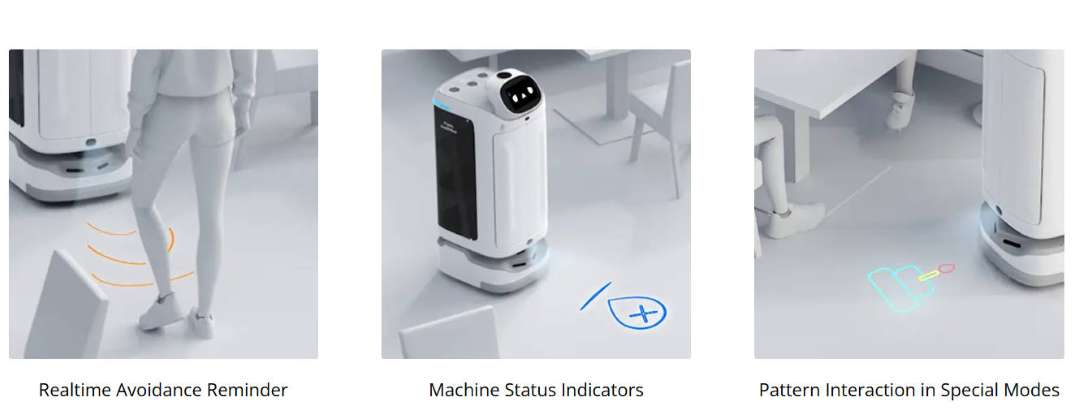
El proyector láser galvo integrado cumple una doble función. Operativamente, proyecta la trayectoria de desplazamiento prevista del robot en tiempo real sobre el suelo, alertando a las personas antes de que el robot llegue a su posición. En modo interactivo, muestra patrones contextuales vinculados al modo activo: animaciones de cumpleaños, efectos de lotería, indicadores de estado cuando el robot pierde el posicionamiento, y flechas direccionales durante la navegación. El array circular de 6 micrófonos con reducción de ruido permite recibir comandos de voz en entornos de cocina y comedor ruidosos. Dos altavoces estéreo de 10 W gestionan las respuestas de audio y los anuncios específicos de cada modo.
La imagen de tres paneles siguiente ilustra el sistema de proyección en la práctica: arcos de aviso de esquiva en el suelo, símbolos de estado de la máquina proyectados durante la navegación, e interacción de patrones decorativos durante una sesión en modo especial.
Carga automática e integración IoT
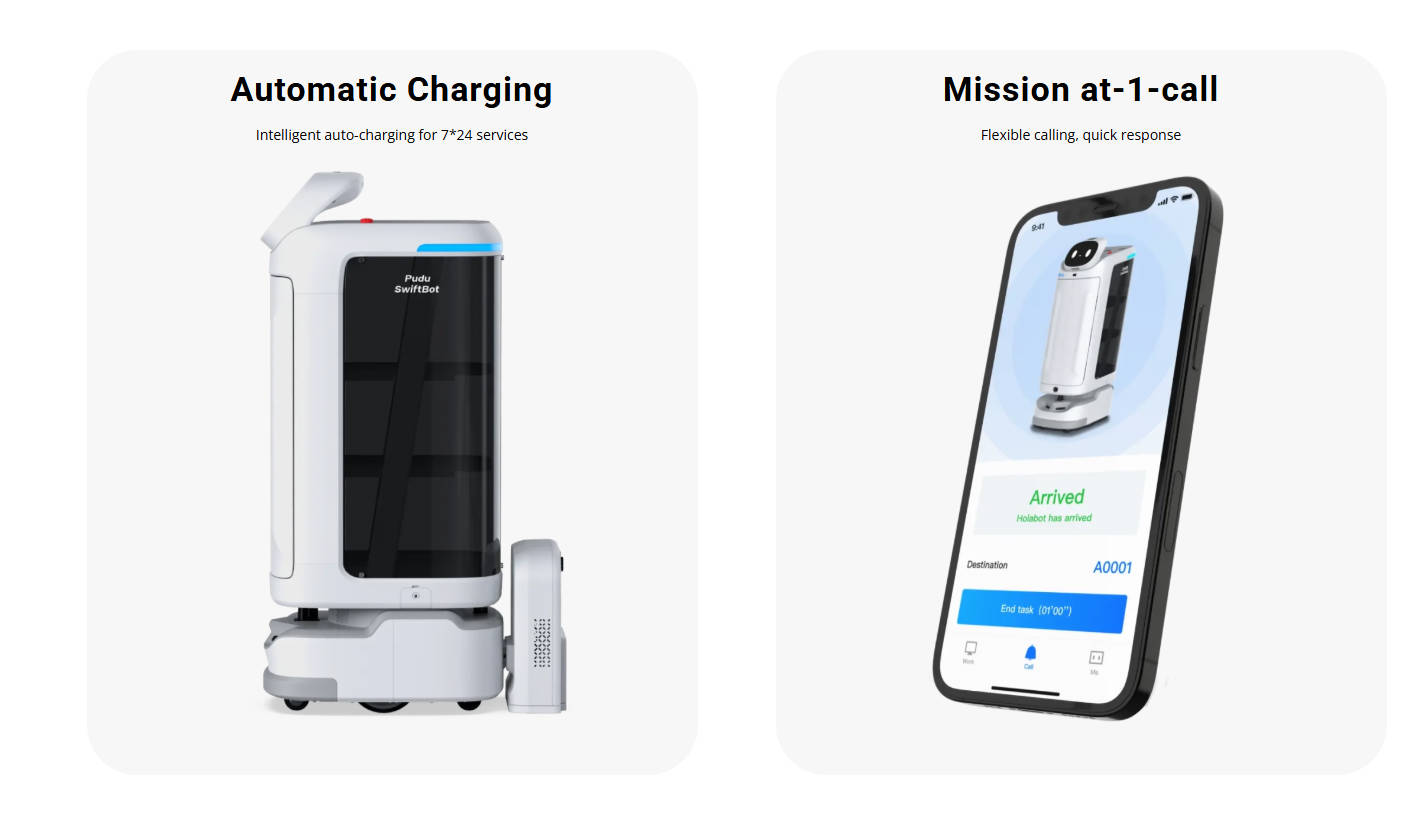
SwiftBot se acopla de forma autónoma a su estación de carga, posibilitando operaciones desatendidas 7×24 sin intervención manual sobre la batería. La batería de 25,6 Ah se carga completamente en 4,5 horas; en la práctica, el rango operativo de 10–24 h significa que un restaurante con un solo servicio de almuerzo y cena puede completar el día completo con una única carga. La carga funciona incluso con el interruptor de llave en posición OFF.
La imagen siguiente muestra la estación de carga automática junto a la interfaz móvil Misión-a-1-llamada, que permite al personal despachar al SwiftBot a cualquier ubicación con un solo toque.
La conectividad IoT va mucho más allá del Wi-Fi. Las interfaces Type-C USB, 4G (B1/B3/B7/B8/B20/B28/B34/B38/B40), LoRa y Bluetooth permiten que SwiftBot se integre con lectores de códigos de barras, altavoces inteligentes, tornos de control de acceso, controladores de ascensores y otros sistemas de gestión de instalaciones. El diagrama siguiente muestra cada punto de integración.

SWFD01 vs. SWFD11: elegir la configuración adecuada
Ambos modelos comparten la misma plataforma de tracción, sistema de navegación y especificación de batería. La diferencia clave reside en el cuerpo: la estructura de tres bandejas abiertas del SWFD01 pesa 55 kg y prioriza la velocidad de carga y la visibilidad del contenido, mientras que la versión con compartimento cerrado del SWFD11 pesa 65 kg y mantiene los artículos entregados ocultos y protegidos. La imagen siguiente muestra ambas configuraciones una junto a la otra.

Especificaciones técnicas del PUDU SwiftBot
El diagrama de vista frontal siguiente sirve de referencia visual de la distribución física del robot antes de las tablas numéricas completas.

Especificaciones físicas
| Modelo | SWFD01 / SWFD11 |
|---|---|
| Dimensiones del robot (An × P × Al) | 593 × 485 × 1277 mm |
| Peso del robot — SWFD01 | 55 kg |
| Peso del robot — SWFD11 | 65 kg |
| Material de la carcasa | ABS y PC |
| Puerta de compartimento automática | SWFD01: No disponible — SWFD11: Disponible |
| Vida útil del servicio | 5 años |
Movilidad y navegación
| Sistema de navegación | Posicionamiento SLAM integrado láser y visual |
|---|---|
| Velocidad de crucero | 0,5–1,2 m/s (ajustable) |
| Anchura mínima de desplazamiento | 80 cm |
| Anchura mínima de giro | 80 cm |
| Altura máx. superable — carga completa | 15 mm |
| Altura máx. superable — sin carga | 20 mm |
| Ángulo máximo de subida | 5° |
| Requisito de superficie | Interior, suelo plano y liso |
Bandejas y carga útil
| Número de bandejas | 3 |
|---|---|
| Dimensiones de la bandeja | 502 × 433 mm |
| Capacidad de carga por bandeja | 15 kg/bandeja |
| Altura entre bandejas (de arriba abajo) | 228 mm / 229 mm / 236 mm |
| Carga útil total máxima | 45 kg |
La imagen siguiente muestra la configuración de bandejas abiertas del SWFD01 con los tres niveles extendidos, ilustrando la superficie de 502 × 433 mm y la separación entre bandejas.

Computación y pantalla
| Tamaño de pantalla | 10,1 pulgadas LCD |
|---|---|
| Sistema operativo | Android |
| Micrófono | Array circular de 6 micrófonos |
| Potencia de los altavoces | 2 × 10 W estéreo |
Alimentación y batería
| Tensión de funcionamiento | DC 23–29,4 V |
|---|---|
| Entrada de alimentación | AC 100–240 V, 50/60 Hz |
| Salida de alimentación | 29,4 V / 8 A |
| Capacidad de la batería | 25,6 Ah |
| Autonomía de la batería | 10–24 h |
| Tiempo de carga | 4,5 h |
Entorno y seguridad
| Grado de protección IP | IP22 |
|---|---|
| Temperatura de trabajo | 0 °C a 40 °C, HR ≤ 85% |
| Temperatura de almacenamiento | -40 °C a 65 °C, HR ≤ 85% |
| Altitud máxima de trabajo | < 2000 m |
Conectividad y radio
| Bandas Wi-Fi | 2,4 GHz / 5,2–5,6 GHz / 5,8 GHz |
|---|---|
| Bluetooth | 2402–2480 MHz |
| Bandas 3G | B1 / B8 |
| Bandas 4G | B1 / B3 / B7 / B8 / B20 / B28 / B34 / B38 / B40 |
| Interfaces cableadas y de expansión | USB Type-C, ranura para tarjeta SIM, LoRa |
Contenido del paquete
- Unidad PUDU SwiftBot — SWFD01 (bandejas abiertas) o SWFD11 (puerta de compartimento automática)
- Estación de carga automática con electrodo de acoplamiento
- Cable de alimentación (compatible con AC 100–240 V)
- Guía de inicio rápido
Cómo poner en marcha el PUDU SwiftBot por primera vez
Este procedimiento describe cómo encender el SwiftBot, verificar la posición del punto de arranque e iniciar una tarea de entrega desde la pantalla a bordo.
Paso 1: Posicionar el robot en el punto de arranque
Para el mapeo láser, coloque el robot en el punto de arranque designado con la orientación correcta. Para el mapeo por marcador, sitúe el robot directamente bajo el marcador de techo. Confirme que el interruptor de llave está en posición ON antes de continuar.
Paso 2: Encender el robot
Mantenga pulsado el interruptor de encendido durante 1 segundo. Suéltelo cuando la tira de luz se ilumine en azul — esto confirma que el robot se ha inicializado correctamente y está listo para recibir instrucciones.
Paso 3: Iniciar una tarea de entrega
En la pantalla LCD de 10,1 pulgadas, seleccione el modo de funcionamiento deseado (por ejemplo, Entrega de alimentos). Introduzca la mesa o zona de destino y confirme la tarea. El robot comenzará a navegar autónomamente hacia el destino indicado.
Paso 4: Pausar o reanudar durante una tarea
Toque una vez la pantalla del robot durante una tarea activa para pausar el desplazamiento. Tóquela de nuevo para reanudar. Esto no cancela la tarea ni restablece el destino.
Paso 5: Apagar el robot
Mantenga pulsado el interruptor de encendido durante 3 segundos. Cuando aparezca en pantalla la confirmación de apagado, confirme la acción. El robot está completamente apagado cuando la pantalla queda en negro y la tira de luz se apaga.
¿El SwiftBot dispone de puerta de compartimento?
SwiftBot está disponible en dos configuraciones. El modelo SWFD01 tiene bandejas abiertas para la entrega estándar de alimentos. El modelo SWFD11 incorpora una puerta de compartimento automática que se abre y cierra sin intervención del personal, adecuada para entornos clínicos, de hotel o cualquier contexto en que la privacidad del contenido sea importante.
¿Puede el SwiftBot usar ascensores?
Sí. SwiftBot soporta el uso autónomo de ascensores mediante integración IoT. También puede pasar tornos de control de acceso mediante Bluetooth, sin asistencia manual en implantaciones multi-planta.
¿Es ajustable la altura de las bandejas?
El bastidor de bandejas ofrece tres posiciones de instalación. Los operadores pueden elegir cuántas bandejas instalar (1, 2 o las 3) y en qué posiciones verticales, adaptando el robot a la altura de los recipientes usados en su establecimiento.
¿Cuánto tarda en cargarse el SwiftBot?
La carga completa requiere 4,5 horas. La carga se realiza automáticamente cuando el robot se acopla a su estación de carga, y funciona incluso con el interruptor de llave en posición OFF.
¿Cuál es el ancho mínimo de pasillo necesario?
Tanto el desplazamiento en línea recta como el giro requieren una anchura mínima de 80 cm. Esto se aplica a pasillos, puertas y cualquier paso que el robot deba recorrer durante la operación normal. Los locales con pasillos por debajo de este umbral deberán realizar ajustes de distribución antes del despliegue.
¿Qué modos de servicio admite el SwiftBot?
SwiftBot admite seis modos: Entrega de alimentos, Entrega, Crucero, Guía, Cumpleaños e Interacción. La selección del modo se realiza directamente en la pantalla táctil a bordo y puede cambiarse entre tareas sin necesidad de reconfiguración de hardware.
¿Por qué elegir EXPERT3D?
EXPERT3D lleva especializándose en robótica avanzada y tecnología 3D desde 2012 — más de una década de experiencia práctica seleccionando, implantando y prestando soporte a plataformas profesionales en restaurantes, hoteles, instalaciones sanitarias y entornos comerciales en toda España y Europa. Como representante oficial de PUDU, garantizamos el mejor precio, servicio autorizado y garantía oficial. Ofrecemos consulta técnica previa a la venta, coordinación logística en España y la UE, y asistencia posventa con contacto directo con el fabricante. Contáctenos para hablar de los requisitos concretos de su establecimiento, las opciones de configuración y la disponibilidad actual.



















 – Robot de Publicidad y Hostes")


