
- Disponibilidad: En stock
- Código del producto: 10310-000002
- Peso bruto: 240.00kg
El PUDU T600 es un robot móvil autónomo (AMR) de carga pesada diseñado para la logística industrial en almacenes y entornos de fabricación, con capacidad para transportar hasta 600 kg por trayecto sin operador a bordo. Disponible en versión Estándar y versión Underride, combina navegación VSLAM con LiDAR SLAM en una arquitectura de doble capa, reconoce posiciones de estantes de forma autónoma e integra de forma nativa el control de ascensores del edificio mediante IoT. Una batería de litio de 30 Ah proporciona 12 horas de funcionamiento continuo sin carga y 6 horas a carga máxima, con un ciclo de recarga rápida de 2 horas que mantiene las flotas operativas durante todo el día.
| Carga máxima | 600 kg (1.322 lbs) |
|---|---|
| Método de navegación | VSLAM + LiDAR SLAM (Estándar); solo LiDAR SLAM (Underride) |
| Autonomía de batería | 12 h (sin carga) / 6 h (carga máxima) |
| Tiempo de carga | Aprox. 2 h (del 0 % al 90 %) |
La vista frontal de la versión Estándar muestra la base compacta del chasis junto con la torre de control elevada, con la pantalla táctil de 10,1 pulgadas y el mango ergonómico que permiten operar el robot directamente en zonas de trabajo compartidas entre personas y máquinas, sin necesidad de un terminal externo.

600 kg de capacidad de carga: qué significa para la logística industrial
La mayoría de los AMR de carga ligera alcanzan un máximo de 100–200 kg, suficiente para carros de documentación o cargas de servicios. El PUDU T600 opera en una categoría completamente diferente: transporte de materias primas entre células de producción, movimiento de palets entre plantas y transferencias de alta frecuencia de contenedores en almacenes de pasillo ancho. Con 600 kg de carga máxima, una sola misión del T600 puede sustituir entre cuatro y seis desplazamientos manuales equivalentes, reduciendo directamente las horas de mano de obra y el tráfico de carretillas elevadoras en los pasillos logísticos más congestionados.
Ambas configuraciones —Estándar (con torre vertical) y Underride (chasis plano)— comparten la misma calificación de 600 kg. La imagen siguiente muestra ambas variantes lado a lado, con su carga máxima representada visualmente.

Versión Estándar frente a versión Underride: cómo elegir la configuración adecuada
La serie T600 ofrece dos variantes de hardware estructuralmente distintas, adaptadas a geometrías de flujo de trabajo diferentes. La versión Estándar tiene 1.350 mm de altura e incluye pantalla táctil de 10,1 pulgadas, interruptor de asistencia de potencia, luces indicadoras frontales y proyector de seguridad de suelo. Es la opción indicada cuando los operadores necesitan asignar tareas localmente o cuando el entorno requiere un perfil de robot claramente visible. La versión Underride reduce su altura a 255 mm, lo suficiente para deslizarse bajo los estantes de almacenamiento, elevar unidades completas de estantería y ejecutar flujos de trabajo de tipo goods-to-person sin ninguna intervención manual en el estante. Ambos modelos pesan menos de 115 kg y comparten la batería de 30 Ah, el protocolo VDA5050 y el límite de carga de 600 kg.
La imagen siguiente muestra las dos variantes aproximándose a sus estaciones de carga de acoplamiento automático, un elemento esencial para mantener la operación continua en turnos múltiples sin intervención manual en la batería.

Reconocimiento de grupos de estantes: recogida y colocación autónomas sin alineación manual
La arquitectura de navegación del T600 puede identificar ubicaciones de almacenamiento específicas dentro de un grupo de estantes configurado y posicionarse para operaciones de recogida y colocación sin lectores de código de barras ni guía manual. Los datos de la cámara VSLAM y la fusión del sensor LiDAR localizan la posición objetivo y calculan la aproximación final de acoplamiento con precisión repetible. El planificador de flota envía un identificador de destino; el robot gestiona la aproximación, la adquisición de carga y la salida de forma autónoma. En la versión Underride, esto se extiende a elevar unidades completas de estantería: el robot se desplaza bajo el estante, activa el mecanismo de elevación y transporta la estantería completa hasta la siguiente estación de trabajo.
La unidad Underride de la imagen siguiente está posicionándose bajo una estantería de almacén, con el mecanismo de elevación preparado para un ciclo completo de transporte de estantería sin participación del operario.

Para el modelo Estándar, la plataforma de soporte de carga permite transportar cargas apiladas que alcanzan una fracción considerable del límite de 600 kg. La imagen siguiente muestra el T600 Estándar transportando dos grandes cajas de cartón apiladas sobre la plataforma de soporte con plena estabilidad estructural.

Arquitectura de navegación: por qué VSLAM + LiDAR SLAM no es redundancia, sino resiliencia
Depender de una sola modalidad de navegación en un entorno industrial real implica un riesgo operativo. El LiDAR SLAM construye un mapa 2D de planta muy preciso, pero tiene dificultades cerca de particiones de vidrio, superficies espejadas y geometría de estantería muy repetitiva. El VSLAM añade una capa visual orientada al techo que ancla el posicionamiento en referencias visuales estables, independientemente de lo que ocurra a nivel de suelo. El T600 Estándar fusiona ambas corrientes en tiempo real: cuando una señal se degrada, la otra mantiene la continuidad de localización. La variante Underride utiliza únicamente LiDAR SLAM, suficiente para su entorno de operación confinado bajo los estantes.
El diagrama de envolvente de sensores que se muestra a continuación ilustra cómo el LiDAR, las cámaras de profundidad RGBD y los sensores de colisión crean juntos un campo de conciencia espacial por capas alrededor de cada unidad T600.

Esquivar obstáculos de forma dinámica: respuesta a carretillas, personas y equipos en movimiento
Los almacenes industriales no son entornos de prueba estáticos. Las carretillas se reposicionan, los trabajadores cruzan los pasillos y los transpalés quedan en los corredores de tránsito por debajo de la altura de barrido del LiDAR. El sistema de esquivado dinámico de obstáculos del T600 aborda los tres escenarios: las cámaras de profundidad RGBD orientadas hacia abajo detectan objetos de perfil bajo que el LiDAR no captaría; los parachoques de colisión proporcionan una capa de seguridad física de última instancia; y un algoritmo de replanificación de ruta en tiempo real recalcula el trayecto en cuanto se confirma un obstáculo estacionario. Los obstáculos en movimiento activan una reducción de velocidad seguida de una detención completa antes de cualquier contacto.
La visualización del barrido de sensores que aparece a continuación muestra al T600 detectando un transpalet dentro de su perímetro de seguridad, con los anillos circulares del LiDAR cuantificando las distancias de separación alrededor del obstáculo antes de emitir una decisión de desvío.

Proyección de seguridad en el suelo: una señal de seguridad independiente del idioma
Las unidades T600 en versión Estándar proyectan una marca de advertencia lineal de color rojo sobre el suelo directamente frente a la dirección de desplazamiento del robot. Este proyector de contorno de seguridad cumple una función específica en entornos de trabajo mixtos persona-robot: comunica la zona de trayectoria ocupada del robot mediante una señal visual a nivel del suelo que los trabajadores reconocen de forma instintiva, sin necesidad de leer una pantalla ni responder a una alerta sonora. La proyección sigue la dirección del robot en tiempo real, garantizando que el límite de seguridad siempre esté correctamente orientado respecto a la dirección de avance. Esta función es exclusiva de la versión Estándar y no está disponible en la variante Underride.
La imagen siguiente muestra a un trabajador de almacén reconociendo la proyección roja en el suelo del T600 y ajustando su camino, con la proyección actuando como un canal de comunicación pasivo y permanente entre el robot y los compañeros humanos en el mismo pasillo.

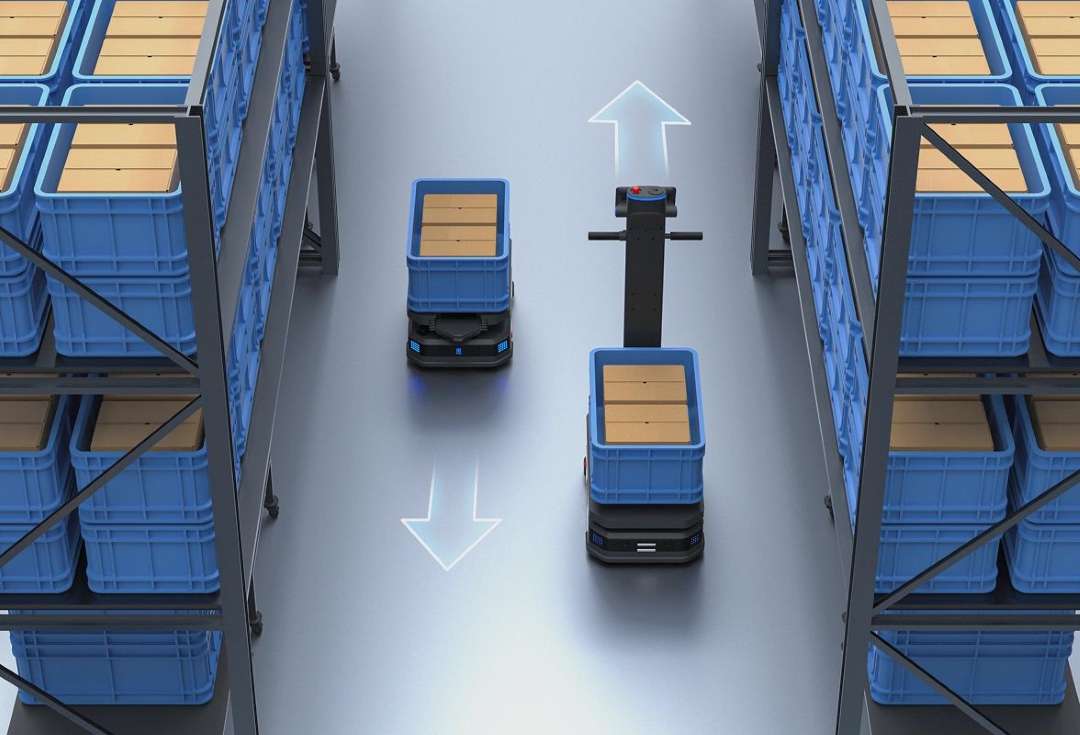
Gestión inteligente de pasillos estrechos: tráfico dinámico de un carril y dos carriles
Coordinar varios robots de carga pesada en corredores que apenas permiten el paso bidireccional es uno de los retos operativos más complejos en almacenes de alta densidad. La Estrategia de Tráfico Inteligente en Pasillos Estrechos del T600 resuelve esto a nivel del planificador de flota: el sistema evalúa el ancho de paso en tiempo real frente a las dimensiones físicas reales de cada robot —incluida cualquier extensión lateral de la carga registrada en el menú de Configuración de Robot— y determina automáticamente si dos unidades pueden cruzarse simultáneamente (doble carril) o deben avanzar secuencialmente (un carril). Las cargas anchas se enrutan en secuencia; las cargas más estrechas pueden cruzarse al mismo tiempo. El resultado es la maximización del rendimiento del pasillo sin riesgo de colisión, recalculado en cada paso en función de la geometría real de la carga.
La imagen siguiente muestra dos unidades T600 navegando en direcciones opuestas por un corredor de almacenamiento estrecho, habiendo determinado el algoritmo de tráfico bidireccional que el cruce simultáneo es geométricamente seguro para las cargas actuales de ambas unidades.
Cuando las rutas primarias no están disponibles —un robot estacionado, una bahía parcialmente bloqueada o una zona temporalmente restringida—, el planificador de flota emite instrucciones de desvío en tiempo real. La imagen siguiente muestra varias unidades Underride en un entorno de estantería de contenedores ejecutando decisiones de desvío de ruta, con flechas indicadoras de dirección que confirman las trayectorias alternativas seleccionadas.

Respuesta ante emergencias: un módulo de seguridad más allá de la parada estándar
La mayoría de los AMR industriales se detienen al encontrar un obstáculo y alertan al operador. El T600 va más allá con un Módulo de Protección ante Emergencias dedicado que se conecta directamente a la infraestructura de alarmas del edificio, específicamente a los paneles de alarma de incendios y a los detectores sísmicos. Al recibir una señal de incendio o de terremoto, el robot ejecuta automáticamente una respuesta de emergencia preprogramada: navegación autónoma hasta una zona de estacionamiento de seguridad designada, o un aparcamiento inteligente en el lugar seleccionado para minimizar la obstrucción de las vías de evacuación. Una flota de unidades T600 no se congela en posición durante una emergencia del edificio, sino que despeja el área operativa de forma coordinada.
El escenario siguiente ilustra el comportamiento de protección ante emergencias a nivel de flota: múltiples unidades T600 reciben señales de advertencia (triángulos naranja) y ajustan automáticamente sus rutas lejos de las zonas de alarma activadas, coordinadas por el planificador central para evitar cuellos de botella durante la secuencia de evacuación.

Mango con asistencia de potencia: control manual bajo carga completa
Incluso en el almacén más automatizado se requieren ocasionalmente reposicionamientos manuales: tras un mantenimiento, durante la construcción inicial del mapa del recinto o al guiar el robot por una zona temporalmente sin mapear. Mover manualmente un robot de 112 kg con una carga de cientos de kilogramos no es tarea de una sola persona sin asistencia. El interruptor de asistencia de potencia con mango ergonómico de la versión Estándar resuelve esto: al presionar el interruptor, se activa un modo de asistencia motorizada que amplifica la fuerza de empuje del operador hasta un nivel manejable para una sola persona. Esta función no está disponible en la versión Underride.
La imagen siguiente muestra a un operario utilizando el mango de asistencia de potencia para guiar manualmente el T600 Estándar mientras transporta una plataforma de carga totalmente cargada, demostrando la utilidad práctica del mecanismo de asistencia en un escenario real de mantenimiento en almacén.

Consejo técnico: Al desplegar unidades T600 en rampas o pendientes de 3°, la capacidad de carga permitida disminuye a medida que aumentan la altura del centro de masa de la carga y su desplazamiento lateral. La guía de operaciones especifica tablas de altura de carga frente a desplazamiento del centro de masa (CoM) que definen la carga máxima segura en cada combinación de pendiente. Antes de enviar un robot cargado al máximo por cualquier rampa, verifique que el desplazamiento del CoM de la carga esté dentro del rango permitido para ese nivel de carga: es configurable desde Ajustes > Funciones del Robot > Configuración de Operación.
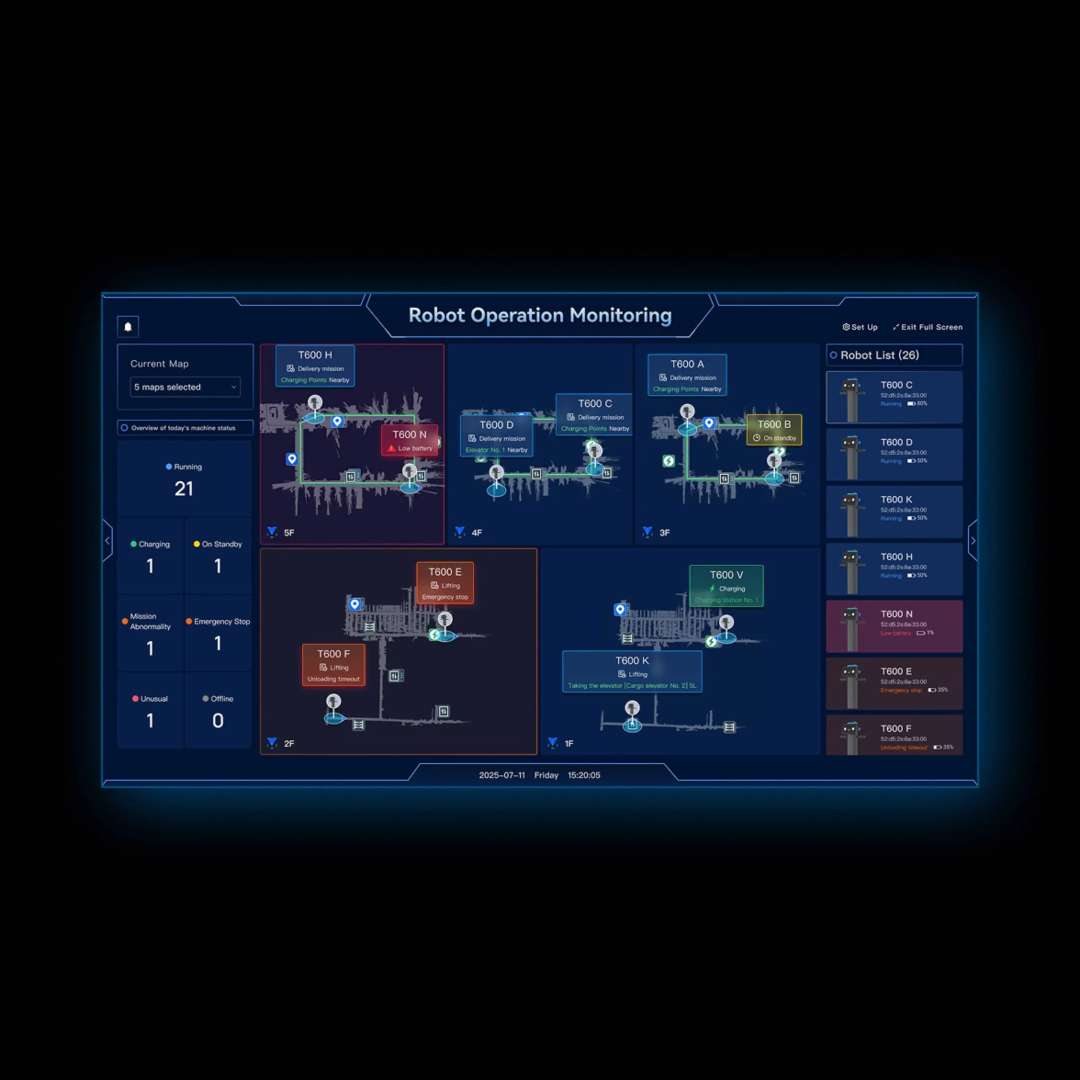
Planificación de flota, protocolo VDA5050 e integración IoT
El T600 está diseñado como un nodo de red, no como una unidad aislada. El cumplimiento del protocolo VDA5050 proporciona una interfaz de comunicación estandarizada para recibir datos de misión, reportar estado y coordinarse con otros robots compatibles con VDA5050 independientemente del fabricante. Una flota mixta de unidades T600 junto a otros AMRs compatibles se gestiona desde una única capa de planificación sin necesidad de trabajo de integración personalizado. Para almacenes que ya ejecutan un sistema de gestión de almacén (SGA) compatible con VDA5050, la integración se logra sin desarrollo de API a medida. El despliegue en servidores propios (on-premises) está disponible para instalaciones con requisitos estrictos de seguridad de datos o arquitecturas de red cerrada.
El panel de supervisión en tiempo real que se muestra a continuación ofrece una vista de 26 unidades T600 distribuidas en cinco plantas del edificio, cada una reportando su nivel de batería, estado de misión actual y posición en el plano del recinto, todo visible simultáneamente desde una única interfaz de control.
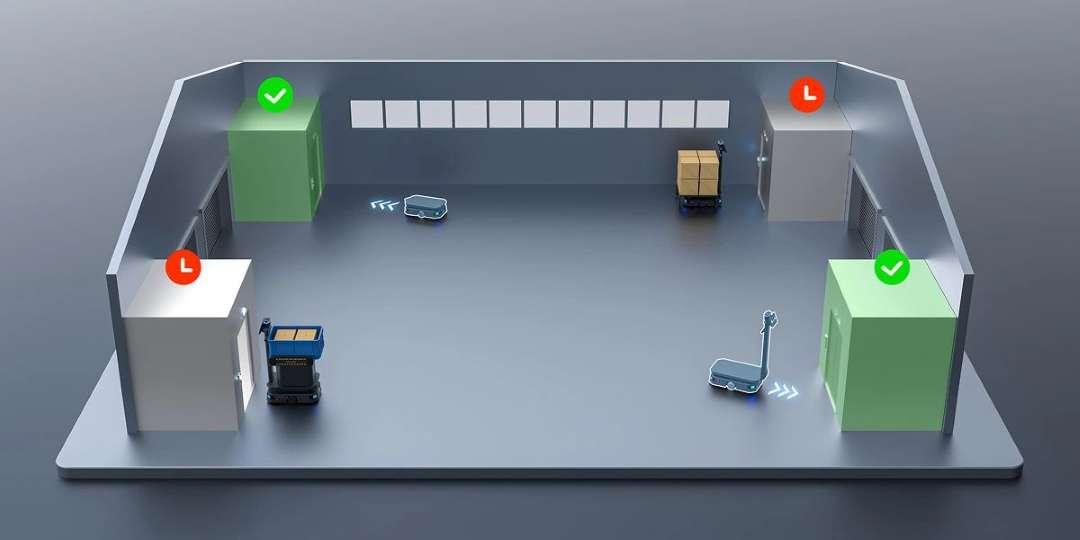
Integración con ascensores IoT: reparto autónomo entre plantas
El transporte de mercancías entre plantas en instalaciones de varios pisos es habitualmente la tarea logística más difícil de automatizar: requiere que el robot interactúe con la infraestructura del edificio, no solo que navegue por el espacio a nivel de suelo. El T600 lo resuelve mediante integración directa con los sistemas de control de ascensores por IoT: el robot se comunica con el sistema del ascensor para llamar a una cabina disponible, navegar hasta ella, seleccionar la planta de destino y salir al llegar, sin asistencia humana en ninguna fase. El algoritmo de Planificación Prioritaria de Ascensores Libres monitoriza en tiempo real todas las cabinas y selecciona la que esté desocupada en ese momento, minimizando los tiempos de espera en los picos de actividad y evitando conflictos de recursos cuando varios robots compiten por el mismo ascensor.
El mapa de despacho del recinto que se muestra a continuación ilustra la lógica de prioridad de ascensores libres: los indicadores verdes señalan las cabinas disponibles que están siendo asignadas a los robots que se aproximan, mientras que los indicadores rojos muestran las cabinas ocupadas que la capa de planificación descarta.
Despliegue a gran escala: conectividad WiFi y arquitectura en servidor propio
Las instalaciones empresariales con decenas de unidades T600 en un gran recinto requieren una arquitectura de comunicaciones y gestión que sea fiable a escala. El sistema admite el despliegue en servidores propios: toda la lógica de planificación, los mapas del recinto y la telemetría de la flota permanecen dentro de la infraestructura de red de la propia instalación, sin enrutar datos a través de servicios de nube pública. Esto es especialmente relevante para entornos de fabricación con requisitos estrictos de protección de propiedad intelectual o para instalaciones con conectividad externa poco fiable. La aplicación móvil PUDU Link proporciona asignación de tareas, supervisión del estado de la flota y gestión de alertas desde cualquier punto dentro de la cobertura WiFi del recinto.
La visualización a vista de pájaro que se muestra a continuación representa un despliegue industrial multi-robot a gran escala, con unidades T600 y otros AMRs conectados a través de una malla WiFi unificada, ilustrando la amplitud de la automatización logística que una única capa de gestión puede orquestar sin supervisión manual por unidad.

Funcionamiento ininterrumpido: batería, modos de carga y planificación de autonomía
El T600 lleva una batería de iones de litio de 30 Ah diseñada para ciclos industriales de descarga profunda. Sin carga, la autonomía alcanza las 12 horas; a la carga máxima de 600 kg, la ventana operativa es de 6 horas, suficiente para un turno estándar completo a plena capacidad. Para instalaciones con tres turnos, el ciclo de carga rápida de 2 horas (del 0 % al 90 %) permite una estrategia de carga entre turnos con un tiempo de inactividad mínimo. Para operaciones verdaderamente ininterrumpidas durante las 24 horas, están disponibles en paralelo dos opciones: carga de acoplamiento automático, donde el robot navega autónomamente hasta la estación de carga cuando el nivel de batería cae por debajo del umbral configurado; y sustitución rápida de batería, que permite instalar una batería nueva en aproximadamente 60 segundos manteniendo la alimentación del robot (si está habilitado en los Ajustes Avanzados).
- Batería de iones de litio de 30 Ah — sin efecto memoria, diseñada para ciclos industriales de descarga profunda
- Carga de acoplamiento automático: el robot navega autónomamente a la estación de carga cuando la batería está baja
- Sustitución rápida: cambio de batería en 60 segundos con continuidad de alimentación (Ajustes Avanzados)
- Almacenamiento de la batería: cargar al 30–50 % antes de períodos de inactividad superiores a 15 días
- Rango de temperatura de operación: 0 °C a 40 °C; almacenamiento a corto plazo hasta 60 °C
Especificaciones técnicas del PUDU T600
Mecánica
| Dimensiones — versión Estándar | 960 × 500 × 1350 mm |
|---|---|
| Dimensiones — versión Underride | 845 × 500 × 255 mm |
| Peso — versión Estándar | 112 kg (246,92 lbs) |
| Peso — versión Underride | 94 kg (207,23 lbs) |
| Carga máxima | 600 kg (1.322,77 lbs) |
| Altura máx. de obstáculo superable | 10 mm (0,39 pulgadas) |
| Ranura máx. superable | 35 mm (1,38 pulgadas) |
| Pasabilidad mínima — Estándar | 70 cm (27,6 pulgadas) |
| Pasabilidad mínima — Underride | 65 cm (25,6 pulgadas) |
Alimentación y electricidad
| Tensión de funcionamiento | CC 20,8 V ~ 29,2 V |
|---|---|
| Capacidad de batería | 30 Ah |
| Tiempo de carga | Aprox. 2 h (del 0 % al 90 %) |
| Autonomía de batería — sin carga | 12 h |
| Autonomía de batería — carga máxima | 6 h |
Navegación y movilidad
| Método de navegación — Estándar | Visual-SLAM + Laser-SLAM (VSLAM + LiDAR SLAM) |
|---|---|
| Método de navegación — Underride | Solo Laser-
Productos vistos recientemente
Marca: PUDU
Código del producto: 10310-000002
El PUDU T600 es un robot móvil autónomo (AMR) de carga pesada
diseñado para la logística industrial en almacenes y entornos de fabricación,
con ca..
27 830€
Sin IVA:23 000€

Marca: PUDU
Código del producto: 00-00014079
PUDU MT1 Max robot industrial autónomo de limpieza con IA
PUDU MT1 Max es un robot de limpieza industrial de nueva generación diseñado para automatiz..
24 079€
Sin IVA:19 900€


Marca: PUDU
Código del producto: 00-00014081
PUDU CC1 Pro robot inteligente de limpieza con IA
PUDU CC1 Pro es una solución avanzada de limpieza autónoma diseñada para el mantenimiento completo ..
24 200€
Sin IVA:20 000€

Marca: PUDU
Código del producto: 00-00014080
PUDU CC1 Black Pro robot inteligente de limpieza con IA
PUDU CC1 Black Pro es una versión mejorada de la serie CC1, diseñada para el mantenimiento co..
25 410€
Sin IVA:21 000€


Marca: PUDU
Código del producto: 00-00014083
PUDU BellaBot Pro (White) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (White) es un robot de servicio autónomo diseñado para restaura..
13 310€
Sin IVA:11 000€


Marca: PUDU
Código del producto: 00-00014082
PUDU BellaBot Pro (Black) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (Black) es un robot de servicio autónomo moderno diseñado par..
13 310€
Sin IVA:11 000€


Marca: PUDU
Código del producto: 10080-000097
El PUDU SwiftBot es un robot de servicio comercial de
interior diseñado para la entrega autónoma de alimentos, el transporte de
artículos y la int..
13 915€
Sin IVA:11 500€

Marca: PUDU
Código del producto: 10040-000071
El PUDU BellaBot es un robot de reparto autónomo de interior diseñado para
restaurantes, hoteles y entornos de servicio comercial, que combina posic..
9 680€
Sin IVA:8 000€


Marca: PUDU
Código del producto: 10070-000059
PUDU KettyBot Pro es un robot autónomo de entrega y recepción diseñado para restaurantes, hoteles y entornos de venta al público, con navegación SLAM ..
9 075€
Sin IVA:7 500€


Marca: PUDU
Código del producto: 10170-000015
El PUDU PuduBot 2 es un robot de reparto autónomo para
interiores diseñado para entornos comerciales de alta actividad: restaurantes,
hoteles, hos..
7 078€
Sin IVA:5 850€

Marca: PUDU
Código del producto: 10050-000069
El PUDU HolaBot es un robot de servicio autónomo de alta
capacidad diseñado para entornos de hostelería, sanidad y comercio con alto
volumen de ac..
11 011€
Sin IVA:9 100€


Marca: PUDU
Código del producto: 10250-000008
El PUDU MT1 es un robot barredora autónomo con inteligencia
artificial, diseñado para entornos comerciales e industriales de gran
afluencia: almac..
18 029€
Sin IVA:14 900€

Marca: PUDU
Código del producto: 10080-000037
El PUDU FlashBot es un robot autónomo de entrega para edificios diseñado
específicamente para hoteles y torres de oficinas de múltiples plantas, cap..
16 335€
Sin IVA:13 500€
 – Robot de Publicidad y Hostes")
Marca: PUDU
Código del producto: 10070-000011
PUDU KettyBot es un robot de entrega y recepción
multipropósito diseñado para restaurantes, hoteles, supermercados y entornos
comerciales de alto ..
8 349€
Sin IVA:6 900€

Marca: PUDU
Código del producto: 10251-000002
El PUDU MT1 Vac es un robot de limpieza autónomo 3 en 1 de
gama comercial con inteligencia artificial — barre, aspira y pasa mopa —
diseñado para ..
18 029€
Sin IVA:14 900€

Marca: PUDU
Código del producto: 10260-000013
El PUDU T300 Elevator es un robot móvil autónomo (AMR)
industrial diseñado para el transporte de materiales y la gestión de cargas
pesadas en ento..
20 570€
Sin IVA:17 000€
Marca: PUDU
Código del producto: 00-00014079
PUDU MT1 Max robot industrial autónomo de limpieza con IA
PUDU MT1 Max es un robot de limpieza industrial de nueva generación diseñado para automatiz..
24 079€
Sin IVA:19 900€
Marca: PUDU
Código del producto: 00-00014081
PUDU CC1 Pro robot inteligente de limpieza con IA
PUDU CC1 Pro es una solución avanzada de limpieza autónoma diseñada para el mantenimiento completo ..
24 200€
Sin IVA:20 000€
Marca: PUDU
Código del producto: 00-00014080
PUDU CC1 Black Pro robot inteligente de limpieza con IA
PUDU CC1 Black Pro es una versión mejorada de la serie CC1, diseñada para el mantenimiento co..
25 410€
Sin IVA:21 000€
Marca: PUDU
Código del producto: 00-00014083
PUDU BellaBot Pro (White) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (White) es un robot de servicio autónomo diseñado para restaura..
13 310€
Sin IVA:11 000€
Marca: PUDU
Código del producto: 00-00014082
PUDU BellaBot Pro (Black) robot inteligente de entrega y publicidad
PUDU BellaBot Pro (Black) es un robot de servicio autónomo moderno diseñado par..
13 310€
Sin IVA:11 000€
Marca: PUDU
Código del producto: 10080-000097
El PUDU SwiftBot es un robot de servicio comercial de
interior diseñado para la entrega autónoma de alimentos, el transporte de
artículos y la int..
13 915€
Sin IVA:11 500€
Marca: PUDU
Código del producto: 10040-000071
El PUDU BellaBot es un robot de reparto autónomo de interior diseñado para
restaurantes, hoteles y entornos de servicio comercial, que combina posic..
9 680€
Sin IVA:8 000€
Marca: PUDU
Código del producto: 10070-000059
PUDU KettyBot Pro es un robot autónomo de entrega y recepción diseñado para restaurantes, hoteles y entornos de venta al público, con navegación SLAM ..
9 075€
Sin IVA:7 500€
Marca: PUDU
Código del producto: 10170-000015
El PUDU PuduBot 2 es un robot de reparto autónomo para
interiores diseñado para entornos comerciales de alta actividad: restaurantes,
hoteles, hos..
7 078€
Sin IVA:5 850€
Marca: PUDU
Código del producto: 10050-000069
El PUDU HolaBot es un robot de servicio autónomo de alta
capacidad diseñado para entornos de hostelería, sanidad y comercio con alto
volumen de ac..
11 011€
Sin IVA:9 100€
Marca: PUDU
Código del producto: 10250-000008
El PUDU MT1 es un robot barredora autónomo con inteligencia
artificial, diseñado para entornos comerciales e industriales de gran
afluencia: almac..
18 029€
Sin IVA:14 900€
Marca: PUDU
Código del producto: 10080-000037
El PUDU FlashBot es un robot autónomo de entrega para edificios diseñado
específicamente para hoteles y torres de oficinas de múltiples plantas, cap..
16 335€
Sin IVA:13 500€
Marca: PUDU
Código del producto: 10070-000011
PUDU KettyBot es un robot de entrega y recepción
multipropósito diseñado para restaurantes, hoteles, supermercados y entornos
comerciales de alto ..
8 349€
Sin IVA:6 900€
Marca: PUDU
Código del producto: 10251-000002
El PUDU MT1 Vac es un robot de limpieza autónomo 3 en 1 de
gama comercial con inteligencia artificial — barre, aspira y pasa mopa —
diseñado para ..
18 029€
Sin IVA:14 900€
Marca: PUDU
Código del producto: 10260-000013
El PUDU T300 Elevator es un robot móvil autónomo (AMR)
industrial diseñado para el transporte de materiales y la gestión de cargas
pesadas en ento..
20 570€
Sin IVA:17 000€
¿Aún no tienes una cuenta?
|