



- Наявність: У наявності
- Код товару: 10250-000008
- Вага брутто: 160.00kg
PUDU MT1 — це професійний автономний підмітальний робот зі штучним інтелектом, розроблений для великих приміщень зі значним накопиченням сміття: складів, логістичних центрів, виробничих підприємств, аеропортів і торговельних супермаркетів з твердими підлогами. Робот поєднує систему подвійного позиціонування LiDAR SLAM + VSLAM, вбудовану ШІ-камеру розпізнавання сміття та контейнер для сміття ємністю 35 л із системою швидкого від'єднання — і забезпечує професійне сухе прибирання на площах до 100 000 м² зі швидкістю 0,2–1,2 м/с, працюючи безперервно до 8 годин на одному заряді на підлогах із полірованого бетону, епоксидної смоли, гуми та керамічної плитки.
Відео нижче демонструє повний операційний діапазон PUDU MT1 — від виявлення сміття за допомогою ШІ до автономного стикування зі станцією зарядки.
| Ємність контейнера для сміття | 35 л (швидке від'єднання) |
|---|---|
| Максимальний час автономної роботи | До 8 год (акумулятор 45 А·год) |
| Ефективна ширина прибирання | ~70 см (із бічними щітками) |
| Система навігації | Подвійне позиціонування LiDAR SLAM + VSLAM |
На зображенні нижче показано PUDU MT1 в повністю автономному режимі: робот прибирає широкий освітлений промисловий коридор — передня LED-панель увімкнена, бічні щітки повністю розгорнуті — охоплюючи весь прохід за один безперервний прохід.

Промислове прибирання — покриття до 100 000 м²
Більшість роботизованих підмітальних систем розроблено для офісів або роздрібної торгівлі. PUDU MT1 відповідає на принципово інший виклик: великі, завантажені сміттям підлоги логістичних складів, складальних цехів, будівельних супермаркетів і транспортних вузлів, де одна зміна прибирання повинна охопити десятки тисяч квадратних метрів без зупинки для спустошення контейнера. Ємність 35 л є основою цієї витривалості. У поєднанні з до 8 годинами роботи на одному заряді MT1 може виконати повне покриття об'єкту площею 50 000 м² без жодного ручного втручання.
Система подвійної щітки — будь-яке сміття за один прохід
Система прибирання MT1 поєднує центральний роликовий кий із двома обертовими бічними щітками для досягнення ефективної ширини підмітання близько 70 см. Бічні щітки спрямовують великогабаритне сміття — листя, пластикові пляшки, фрагменти картону, алюмінієві банки — до центрального входу, де роликовий кий подає захоплений матеріал у контейнер через систему вентиляції з активним негативним тиском. Вбудований повітряний фільтр затримує дрібнодисперсний пил і запобігає вторинному завихренню частинок — критично важливий фактор на харчових та фармацевтичних складах, де прибирання підлоги не має повторно забруднювати упаковані товари.
На зображенні нижче показано передній профіль PUDU MT1 та геометрію бічної щітки, включно з її розташуванням відносно краю шасі для безщілинного підмітання по периметру.

Контейнер 35 л із швидким від'єднанням — для тривалих робочих циклів
Об'єм 35 л дозволяє MT1 збирати сміття протягом годин безперервної роботи у середовищах з великою кількістю відходів. Зображення нижче — зроблено під час заводської валідації — показує обсяг змішаних промислових відходів за одну сесію: фрагменти картону, плівка, пляшки, клаптики паперу та різне підлогове сміття. Механізм швидкого від'єднання дозволяє витягти та спустошити контейнер без інструментів менш ніж за 30 секунд, мінімізуючи перерви на обслуговування навіть у режимі кількох робочих змін.

Модульна конструкція із швидким від'єднанням
Усі витратні матеріали — контейнер, бічні щітки, роликовий кий і повітряний фільтр — оснащені модульними роз'ємами швидкого від'єднання, що не потребують інструментів. Зелена кнопка бокового фіксатора, видима на зображенні нижче, є єдиним механізмом звільнення всього модуля контейнера. Ця конструктивна філософія реалізована у кожному вузлі технічного обслуговування: бічні щітки знімаються вручну, ручка видалення пилу фільтра доступна зовні, а гумові контактні смуги замінюються без демонтажу.

Розпізнавання сміття засобами ШІ — навчається шаблонам відходів, а не лише прибирає їх
Передня ШІ-камера MT1 безперервно сканує підлогу в режимі реального часу, класифікуючи окремі предмети сміття за допомогою моделі глибокого навчання, яка вдосконалюється через регулярні оновлення бази даних. Серед категорій відходів, що розпізнаються: пластикові пляшки, алюмінієві банки, листя та органічні відходи, зім'яті фольговані обгортки, недопалки та вільні поліетиленові пакети. Коли виявлено зону з підвищеною щільністю сміття, система активує режим «Ультра-точкового прибирання» — цільовий прохід підвищеної інтенсивності, що забезпечує до 500% більшу ефективність прибирання в цій зоні порівняно зі стандартною патрульною швидкістю. ШІ також відрізняє справжнє сміття від малюнків підлоги — надрукованих плиткових орнаментів або пофарбованих ліній — запобігаючи помилковим активаціям прибирання.
На зображенні нижче показано конус виявлення ШІ-камери PUDU MT1, що одночасно ідентифікує п'ять категорій сміття — від твердих ємностей до розсипаних органічних відходів.

LiDAR SLAM + VSLAM — подвійне позиціонування в умовах живого виробничого середовища
Система навігації з одним датчиком відмовляє у живому виробничому приміщенні. Навантажувачі переміщуються, піддони змінюють місця, а персонал постійно перебудовує просторову карту. MT1 вирішує це завдання шляхом злиття LiDAR SLAM з круговим охопленням 360° і візуального VSLAM. LiDAR забезпечує глобальну метричну узгодженість за картографованим планом підлоги; VSLAM компенсує у зонах з відбивними стелажами, скляними перегородками або поверхнями без характерних деталей, де чисте LiDAR-позиціонування втрачає точність. Разом вони підтримують точну й адаптивну локалізацію незалежно від того, як змінюється операційне середовище впродовж робочого дня.
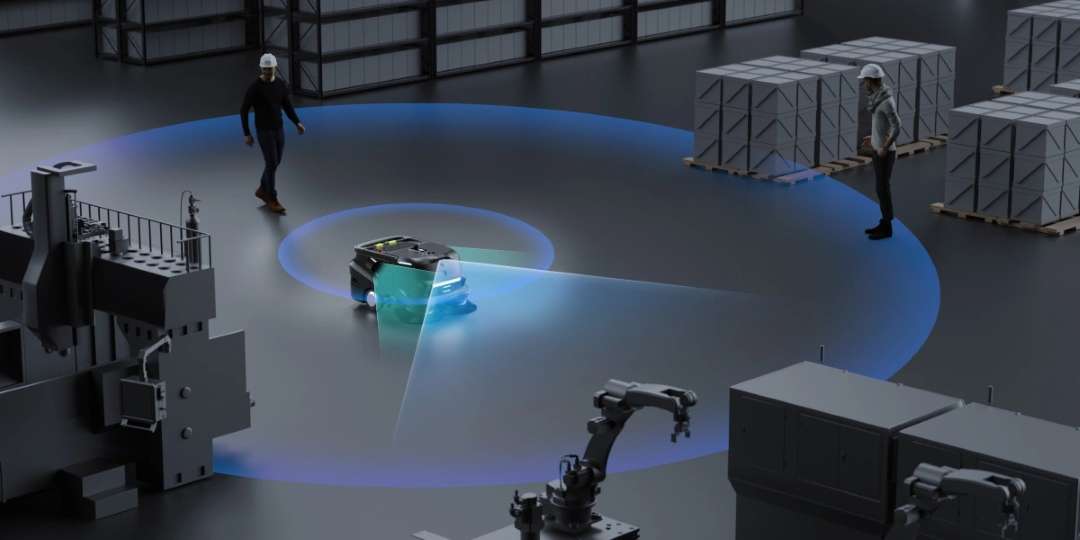
На 3D-рендері нижче зображено навігаційний відбиток MT1 усередині заводу в нічний час: сині дуги — це LiDAR-покриття на 360°, передній конус вказує на активне RGB-D-сприйняття глибини під час живого сканування перешкод, а двоє присутніх робітників підтверджують здатність системи виявляти людей.
Багатосенсорна система безпечного сприйняття
Безпека у завантажених промислових просторах потребує надлишковості датчиків. MT1 поєднує LiDAR, дві RGB-камери, дві RGB-D-камери глибини та лазерні датчики лінії в багаторівневій архітектурі виявлення. Злиття цих датчиків дозволяє розпізнавати низькопрофільні перешкоди, персонал на рівні підлоги, що рухається, та динамічні об'єкти, що перетинають траєкторію прибирання, — активуючи ухилення або контрольовану зупинку ще до будь-якого контакту. Розміщення переднього верхнього вузла датчиків видно на великому плані нижче: VSLAM-камера і передня RGB-камера розташовані над зоною розгортання бічної щітки для безперешкодного поля виявлення.

Ручний режим та ергономічна рукоятка — управління людиною там, де це необхідно
Автономна навігація не завжди є оптимальним режимом. Під'їзди до доків вантаження, переходи через ліфтові пороги, будівельні зони та прибирання після інцидентів потребують прямого управління людиною. MT1 переходить з автономного в ручний режим підняттям висувної рукоятки керування, перетворюючи робота на ходовий підмітальний апарат. Щітки та система контейнера залишаються повністю активними в ручному режимі: оператор керує, робот прибирає.
На зображенні нижче показано MT1 в режимі ручного прибирання на бетонному доку вантаження: оператор прибирає змішане поле з листя, обрізків паперу та фрагментів картону за один прохід.

Знімний екран 10,1 дюйма та механізм висувної рукоятки
Інтерфейс управління MT1 базується на 10,1-дюймовому LCD-екрані на платформі Android зі захисною кришкою. Екран повністю знімається — його можна тримати в руці або кріпити на напрямній рукоятки для повного доступу до інтерфейсу під час ручної роботи. На великому плані нижче показано шарнірний механізм ергономічної рукоятки та позицію кріплення екрана на верхній штанзі: конструкція типу «ножиці» дозволяє регулювати висоту та складається заподлицо з корпусом робота під час автономної роботи.

Безперервна робота 24/7 — автономна зарядка, три цикли на добу
Акумулятор ємністю 45 А·год забезпечує від 4 до 8 годин роботи на один цикл зарядки в стандартних умовах змішаної швидкості. Повна зарядка займає приблизно 3 години, що дозволяє три повних цикли заряд-розряд за 24-годинний період. Коли рівень заряду знижується до порогу повернення, MT1 автономно рухається до зарядної станції, стикується без втручання оператора, заряджається до 100% і відновлює запрограмований графік прибирання. Заплановані завдання можна налаштувати для конкретних часових вікон, дозволяючи нічне прибирання об'єкта без персоналу.
На зображенні зверху нижче показано MT1, повністю пристикований до своєї зарядної станції з екраном, що відображає 100% заряду — стандартний стан готовності перед початком наступного автоматичного сеансу.

Технічні характеристики PUDU MT1
Ідентифікація та фізичні параметри
| Модель | MTBC01 |
|---|---|
| Габарити (Д × Ш × В) | 84 × 60 × 49 см |
| Маса | ~65 кг |
| Матеріал корпусу | PC+ABS |
Живлення та акумулятор
| Робоча напруга | DC 23–29,2 В |
|---|---|
| Вхідна напруга живлення | AC 100–240 В, 50/60 Гц |
| Вихідна потужність | Макс. 29,2 В, 20 А |
| Ємність акумулятора | 45 А·год |
| Час заряджання | ~3 год |
| Час автономної роботи | 4–8 год |
Рухливість та навігація
| Метод навігації | Інтегроване подвійне позиціонування LiDAR та VSLAM |
|---|---|
| Крейсерська швидкість | 0,2–1,2 м/с (регульована) |
| Мінімальна ширина проходу | 75 см |
| Мінімальна ширина для повороту | 110 см |
| Максимальна висота перешкоди | 20 мм |
| Максимальний кут підйому | 8° |
| Максимальна щілина для подолання | 30 мм |
| Рівень шуму під час роботи | <75 дБ |
Система прибирання
| Ширина прибирання (із бічними щітками) | ~70 см |
|---|---|
| Ємність контейнера для сміття | 35 л |
| Типи відходів для прибирання | Папір, поліетиленова плівка, листя, пляшки та загальне підлогове сміття |
Інтерфейс та обчислення
| Екран | 10,1-дюймовий LCD (знімний) |
|---|---|
| Операційна система | Android |
| Мобільний додаток | Підтримується |
| Режим роботи | Ручний / Автоматичний |
Підключення та автоматизація
| Зв'язок | 4G, Wi-Fi, Bluetooth, Lora / 2,4G (опціонально) |
|---|---|
| Автоматична зарядка | Підтримується (разом із зарядною станцією MT1) |
Умови навколишнього середовища
| Робоча температура | 0–40°C (32–104°F) |
|---|---|
| Вологість при роботі | ≤90% ВВ |
| Температура зберігання | -20–70°C (-4–158°F) |
| Вологість при зберіганні | ≤90% ВВ |
| Робоча висота над рівнем моря | <2000 м |
| Область застосування | Полірований бетон, епоксидна смола, гума, цегла, керамічна плитка |
| Ступінь захисту IP | IPX3 |
Комплектація
- Основний блок PUDU MT1 (у зібраному вигляді)
- Зарядний пристрій × 1
- Бічні підмітальні щітки × 2
- Роликовий підмітальний кий × 1
- Посібник користувача PUDU MT1 × 1
- Сертифікат відповідності × 1
- Маркер позиціонування (візуальний маркер) × 1
- Попереджувальний прапорець-стійка × 1
Як запустити автоматичне завдання прибирання на PUDU MT1
Ця процедура описує кроки для запуску заздалегідь налаштованого автономного завдання прибирання на PUDU MT1 — від увімкнення живлення до виконання завдання.
Крок 1: Увімкнути робота
Натисніть та утримуйте кнопку живлення приблизно 3 секунди. Смуга LED у нижній частині робота загориться синім, підтверджуючи запуск системи. Зачекайте повного завантаження екрана, перш ніж продовжувати.
Крок 2: Розташувати робота біля візуального маркера
Розмістіть робота безпосередньо під або перед встановленим маркером візуального позиціонування (залежно від позиції монтажу маркера). Правильне початкове позиціонування необхідне для того, щоб система SLAM зафіксувала початкову локацію. Якщо роботу не вдається позиціонуватися, перевірте вирівнювання з маркером.
Крок 3: Опустити рукоятку
Переконайтеся, що висувна рукоятка управління повністю опущена та складена. Автоматичні завдання прибирання вимагають, щоб рукоятка знаходилась у нижньому положенні перед початком завдання. Якщо екран змонтований на рукоятці, від'єднайте його та прикріпіть до корпусу робота або тримайте в руці.
Крок 4: Вибрати завдання прибирання та натиснути «Старт»
На головній сторінці виберіть заздалегідь налаштоване завдання прибирання для цільової зони. Перегляньте параметри завдання (швидкість прибирання, швидкість щіток, цільова зона) і натисніть «Старт». Робот негайно почне автономну навігацію, рухаючись за картографованим маршрутом.
Крок 5: Контролювати завдання та використовувати аварійну зупинку за необхідності
Контролюйте виконання завдання на екрані або через мобільний додаток. Щоб призупинити в будь-який момент, торкніться екрана один раз. У разі надзвичайної ситуації натисніть червону кнопку аварійної зупинки для негайного зупинення робота. Щоб відновити роботу, поверніть кнопку за годинниковою стрілкою та дотримуйтесь підказок на екрані.
З якими типами підлоги та сміття може працювати PUDU MT1?
PUDU MT1 призначений для твердих підлогових покриттів у приміщеннях: полірований бетон, епоксидна смола, гумове покриття, стандартна цегла та керамічна плитка. Бічні щітки та центральний роликовий кий справляються як з великогабаритним сміттям — листям, пластиковими пляшками, фрагментами картону, банками, — так і з дрібнодисперсним пилом. Не підходить для сильно замаслених поверхонь, підлог зі стоячою водою або нерівних вуличних покриттів.
Скільки часу працює акумулятор PUDU MT1 на одному заряді?
Акумулятор ємністю 45 А·год забезпечує від 4 до 8 годин роботи на цикл зарядки в стандартних умовах змішаної активності. Фактичний час залежить від крейсерської швидкості, щільності сміття та типу підлогового покриття. Повна зарядка з нуля займає близько 3 годин, що дозволяє до трьох повних робочих циклів за 24-годинний період.
Чи повертається PUDU MT1 на зарядну станцію автоматично?
Так. Коли заряд знижується до порогу повернення, MT1 автономно рухається до зарядної станції MT1, стикується без втручання оператора, заряджається до 100% і відновлює запрограмований графік прибирання. Цей цикл автономної зарядки забезпечує безперервну роботу 24/7 на об'єктах з нічними змінами прибирання.
Яка мінімальна ширина коридору потрібна для PUDU MT1?
PUDU MT1 потребує мінімальної ширини проходу 75 см. Для плавного руху довгими коридорами рекомендується ширина понад 85 см. Мінімальна ширина для повороту — 110 см. Проходи або проїзди вужчі за 75 см не підходять для автономної роботи.
Чи можна керувати PUDU MT1 у ручному режимі?
Так. Підняття висувної рукоятки управління негайно активує ручний режим прибирання, перетворюючи MT1 на ходовий підмітальний апарат. Усі щітки та система контейнера залишаються повністю активними під ручним управлінням. Екран 10,1 дюйма можна від'єднати від корпусу та закріпити на рукоятці або тримати в руці для повного доступу до інтерфейсу під час ручної роботи.
Чому обрати EXPERT3D?
EXPERT3D спеціалізується на передовій робототехніці та 3D-технологіях з 2012 року — понад десятиліття практичного досвіду у підборі, впровадженні та підтримці професійних платформ у логістичних операціях, виробничих підприємствах, торговельних мережах та транспортній інфраструктурі по всій Іспанії та Європі. Ми надаємо технічні консультації перед продажем, координуємо доставку та забезпечуємо постпродажну підтримку безпосередньо через контакти з виробниками. PUDU MT1 — це комплексна автономна система: наша команда може допомогти вам оцінити сценарії розгортання, налаштувати графіки прибирання та інтегрувати робота в існуючі процеси управління об'єктом. Як офіційний представник PUDU, ми гарантуємо найкращу ціну, авторизований сервіс та офіційну гарантію. Зв'яжіться з нами, щоб обговорити конкретні вимоги вашого застосування та поточну наявність.












")





")
")

