
- Наявність: У наявності
- Код товару: 10050-000069
- Вага брутто: 90.00kg
PUDU HolaBot — це автономний сервісний робот із підвищеною вантажопідйомністю, призначений для закладів громадського харчування, охорони здоров'я та торгівлі з інтенсивним потоком відвідувачів. При власній масі 55 кг і висоті 1228 мм він транспортує до 60 кг вантажу на чотирьох регульованих лотках — 15 кг на кожному рівні — пересуваючись автономно за допомогою інтегрованої лазерно-візуальної навігації SLAM зі швидкістю 0,5–1,2 м/с та запасом ходу до 12 годин на одному заряді акумулятора.
| Загальна вантажопідйомність | 60 кг (15 кг на лоток × 4 лотки) |
|---|---|
| Технологія навігації | Інтегрований лазерно-візуальний SLAM |
| Час роботи акумулятора | 12 год (без навантаження), знімний блок 25,6 Агод |
| Крейсерська швидкість | 0,5–1,2 м/с (регульована) |
На зображенні нижче показано HolaBot із чотирма підсвіченими прозорими лотками у повній конфігурації — кожен розрахований на 15 кг на рівній поверхні, що забезпечує сукупну вантажопідйомність, якої рідко досягають комерційні сервісні роботи в цьому ціновому діапазоні.

Чотири режими роботи для будь-якого сценарію бізнесу
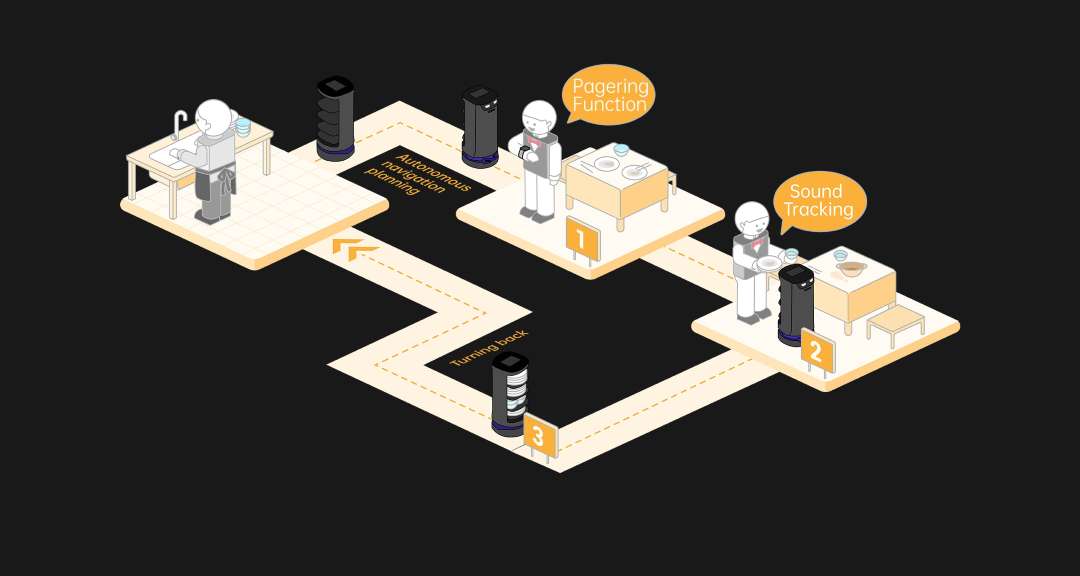
HolaBot не обмежує персонал одним робочим процесом: він пропонує чотири режими завдань, що вибираються безпосередньо з 10,1" РК-сенсорного екрана на Android. Режим доставки відправляє страви до кількох столиків за один рейс, автоматично прокладаючи найкоротший маршрут. Режим збору реалізує зворотний потік — робот об'їжджає до 20 точок підбору та консолідує позиції на одній станції повернення. Режим патрулювання підтримує безперервне курсування заданим маршрутом із налаштовуваними тимчасовими зупинками, що ідеально підходить для буфетних ліній або зон обслуговування в торгових центрах. Прямий режим відправляє робота до єдиного пункту призначення й зупиняє його після виконання завдання без автоматичного повернення.
Діаграма нижче ілюструє робочий процес збору в ресторані: пронумеровані зупинки, планування маршруту автономної навігації та автоматичне повернення до зони миття посуду — без участі людини.
Відсік 120 л: реальна місткість для інтенсивних кухонь
Закритий корпус HolaBot вміщує відсік надвеликого обсягу 120 л, розділений на чотири лотки розміром 390 × 360 мм кожен. На рівній поверхні кожен лоток витримує 15 кг; при переїзді через поріг висотою 5 мм безпечне навантаження знижується до 10 кг на лоток. Відстань між лотками асиметрична: верхній проміжок — 216 мм, три нижніх — по 184 мм, що дозволяє розміщувати високі ємності на верхньому рівні, максимізуючи обсяг на інших. Усі чотири лотки регулюються по висоті. Уся конструкція виконана з авіаційного алюмінієвого сплаву з панелями ABS: жорстка, корозійностійка і достатньо легка, щоб утримати власну масу робота в межах 55 кг.
Передня панель нижче демонструє промисловий дизайн HolaBot: датчики глибини зору у верхній частині, фасад із текстурою карбону, акцентна смуга LED кольору морської хвилі та фірмовий логотип Pudu Robotics — силует, розрахований на гармонійне вписування в інтер'єр ресторану преміум-класу або клінічного простору.

П'ять каналів виклику: робот приходить, коли потрібен
HolaBot підтримує п'ять незалежних каналів виклику, щоб персонал міг викликати його у спосіб, найзручніший для конкретного робочого процесу: смарт-годинник через додаток Pudu, Pudulink — цифрова консоль, пейджер (модуль Lora), NFC-картка на столику та акустичний зумер. Виклик через пейджер особливо ефективний у закладах великої площі: одне натискання кнопки на браслеті або пейджері відправляє робота саме до потрібної точки в режимі реального часу — персоналу не потрібно взаємодіяти з жодним екраном.
Інтерфейс смарт-годинника, показаний нижче, підтверджує модель відправлення у реальному часі: відправник бачить підтвердження виклику "Calling" з ідентифікатором столика (A0723 у цьому прикладі) та можливість скасування одним дотиком.

Air Motion: керування без дотику до екрана
У середовищах, де протоколи гігієни виключають торкання сенсорного екрана — операційних залах, коридорах приготування їжі, ізоляторах — технологія Air Motion HolaBot забезпечує безконтактне керування. Інфрачервоний датчик жестів, встановлений у верхній частині корпусу робота, розпізнає наближення руки та попередньо визначені жести без фізичного контакту з екраном або корпусом. Відстеження звуку доповнює цю функцію: робот може орієнтуватися на джерело голосу, що дозволяє скеровувати його наступні дії голосовими командами.
На зображенні нижче показана функція Air Motion у роботі: голографічна рука над РК-панеллю ілюструє зону виявлення, де жести проведення та дотику реєструються без фізичного контакту з екраном.

Навігація SLAM: злиття лазера та відеопотоку для надійної орієнтації
Точність навігації — найважливіший операційний параметр сервісного робота. HolaBot поєднує спеціальний лідар (кут огляду 220°, встановлений на висоті 0,21 м від підлоги) з двома глибинними камерами RGB-D — верхньою (на висоті 1 м, охоплює перешкоди на рівні тулуба та голови) і нижньою (на висоті 0,12 м, виявлення низьких перешкод та порогів). Це поєднання забезпечує позиціонування SLAM у реальному часі при мінімальній ширині прохідного коридору всього 70 см. Підтримуються три методи картографування: тільки маркери, тільки лазер або комбінований варіант маркер + лазер.
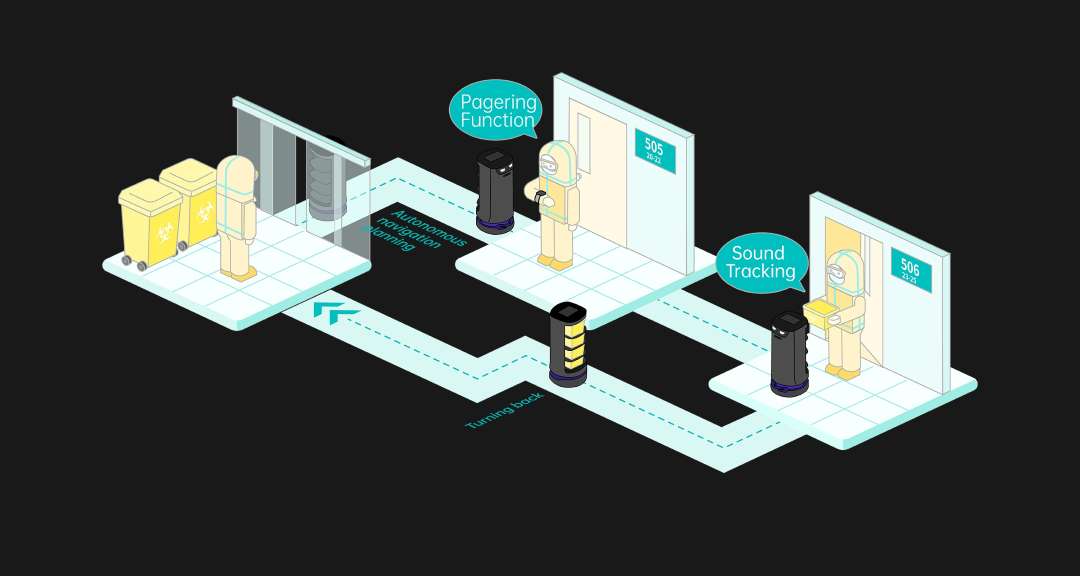
Діаграма медичного коридору нижче демонструє HolaBot у медичному закладі: функція пейджера ініціює автономну навігацію до конкретних номерів палат, а відстеження звуку забезпечує додатковий орієнтир — робот повертається до медичного персоналу, який його викликає, перш ніж рушати далі.
Основа з амортизуючим підвісом: плавний рух — захищений вантаж
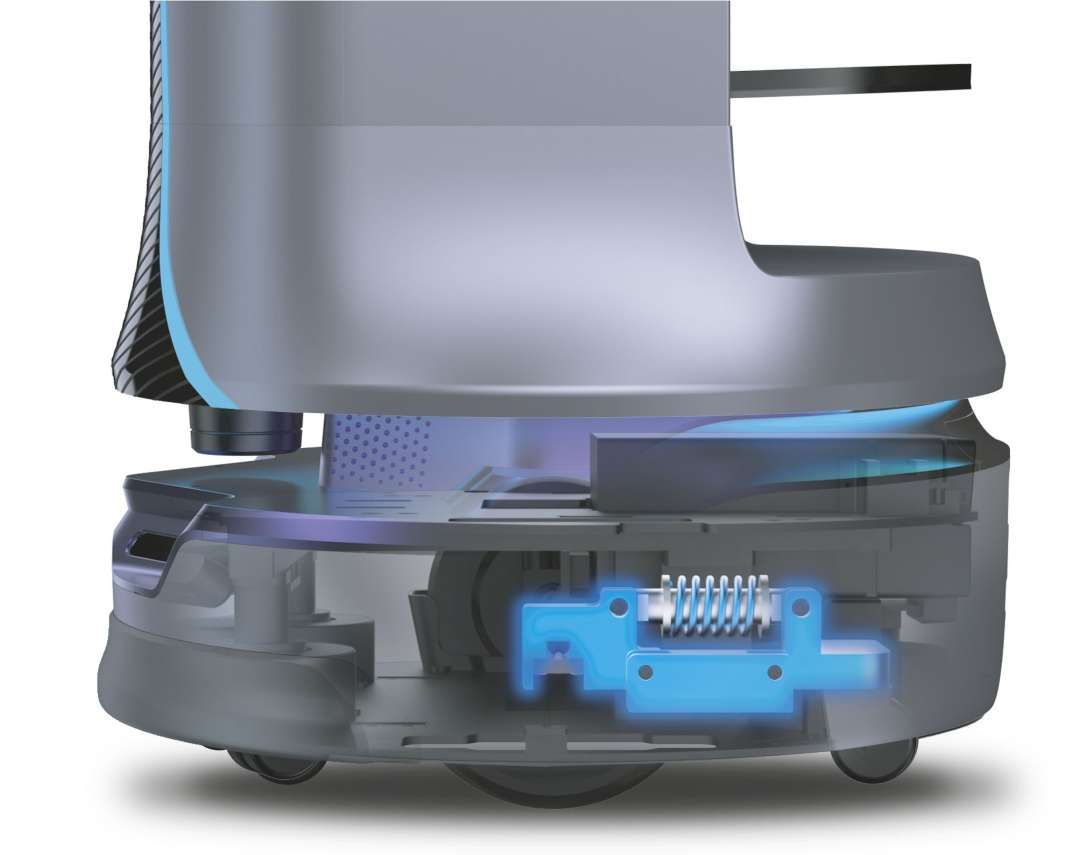
Основа HolaBot оснащена механізмом пружинного підвісу, що автоматично вирівнює шасі під час переїзду через стики підлоги, пороги дверей і переходи між покриттями. Робот долає перешкоди висотою до 7 мм і схили до 5°. Це не пасивна функція: пружинне з'єднання активно поглинає мікроударні навантаження, які інакше передавалися б на завантажені лотки. При 15 кг на лоток різниця між жорстким поштовхом і амортизованим переходом — це різниця між цілим посудом і розбитим.
Рентгенівський переріз нижче розкриває конструкцію підвісу основи: пружинний елемент з'єднання (виділений синім) розташований між колісним шасі та верхньою частиною корпусу й поглинає вертикальні переміщення до того, як вони поширяться через стопку лотків.
Водонепроникний внутрішній відсік: зручне миття, гігієнічні стандарти
У будь-якому закладі громадського харчування або клінічному середовищі питання внутрішньої гігієни не підлягає обговоренню. Внутрішній відсік HolaBot розроблений для прямого миття — рідини, що проливаються з завантажених лотків, не проникають до чутливої електроніки. Силіконові килимки лотків стійкі до масних забруднень і очищаються звичайною водою. Щотижневе технічне обслуговування полягає в протиранні привідних коліс, лотків і поверхонь датчиків чистою тканиною — без спеціальних інструментів або хімічних засобів.
Зображення нижче ілюструє водостійку конструкцію верхньої частини корпусу HolaBot: водний удар відхиляється від внутрішнього відсіку, підтверджуючи, що кабіна спроектована витримувати вологі умови кухонних коридорів.

Технічні характеристики PUDU HolaBot
Механічні розміри
| Загальні розміри (Д × Ш × В) | 542 × 534 × 1228 мм |
|---|---|
| Загальна маса | 55 кг |
| Матеріал корпусу | ABS / авіаційний алюмінієвий сплав |
| Мінімальна ширина проходу | 70 см |
| Мінімальна ширина для повороту | 70 см |
| Максимальна висота подоланої перешкоди | 7 мм |
| Максимальний кут підйому | 5° |
Лотки та вантажопідйомність
| Кількість лотків | 4 |
|---|---|
| Розмір лотка | 390 × 360 мм |
| Обсяг внутрішнього відсіку | 120 л |
| Відстань між лотками (зверху вниз) | 216 мм / 184 мм / 184 мм / 184 мм |
| Навантаження на лоток — рівна поверхня | 15 кг |
| Навантаження на лоток — поріг 5 мм | 10 кг |
| Загальна вантажопідйомність | 60 кг |
| Регулювання висоти лотків | Так — регулюються по висоті |
Привід та переміщення
| Крейсерська швидкість | 0,5–1,2 м/с (регульована) |
|---|---|
| Система підвісу | Пружинний амортизуючий підвіс (автовирівнювання) |
Навігація та датчики
| Метод навігації | Інтегрований лазерно-візуальний SLAM |
|---|---|
| Методи картографування | Маркер, Лазер, Маркер + Лазер (3 варіанти) |
| Положення лідара | 0,21 м від підлоги — кут огляду 220° |
| Верхня RGB-D камера | 1,0 м від підлоги (Astra mini: Г 58°, В 45° / HP60: Г 74°, В 59°) |
| Нижня RGB-D камера | 0,12 м від підлоги (D430: Г 85°, В 58° / Dabai: Г 65°, В 45°) |
| Інфрачервоний датчик жестів | Так — безконтактна взаємодія Air Motion |
Обчислення та інтерфейс
| Операційна система | Android |
|---|---|
| Основний екран | РК-дисплей 10,1" сенсорний |
| Матричний екран | Так — анімовані вирази статусу |
| Мікрофон | Кільцевий масив із 6 мікрофонів |
| Потужність динаміка | 10 Вт × 2 стерео |
| Світлова смуга | Так — RGB-індикатор статусу |
Виклик та програмне забезпечення
| Канали виклику | Смарт-годинник, Pudulink, Пейджер, NFC, Зумер (5 каналів) |
|---|---|
| Режими роботи | Доставка, Збір, Патрулювання, Прямий (4 режими) |
| Максимальна кількість точок збору | 20 на одне завдання |
| Автоматичний проїзд через ворота | Так |
| Хмарне керування | Хмарний сервіс PUDU |
| Оновлення програмного забезпечення OTA | Так (мінімальний заряд акумулятора 20%) |
Живлення та акумулятор
| Робоча напруга | DC 23–29,4 В |
|---|---|
| Вхідна напруга живлення | AC 100–240 В, 50/60 Гц |
| Вихід зарядного пристрою | 29,4 В, 8 А |
| Ємність акумулятора | 25,6 Агод (знімний) |
| Час заряджання | 4,5 год |
| Час роботи акумулятора | 12 год (без навантаження) |
Умови експлуатації та зберігання
| Робоча температура | 0 °C до 40 °C |
|---|---|
| Робоча вологість | ≤ 85% відн. вол. |
| Температура зберігання | -40 °C до 65 °C |
| Вологість при зберіганні | ≤ 85% відн. вол. |
Комплектація
- Сервісний робот PUDU HolaBot (у зібраному вигляді)
- Знімний розумний акумулятор 25,6 Агод (встановлений)
- Зарядний кабель та адаптер змінного струму (29,4 В / 8 А)
- Посібник із швидкого запуску та інструкція з експлуатації
Як увімкнути та запустити PUDU HolaBot
Ця процедура описує послідовність першого запуску HolaBot: від перевірки акумулятора до призначення першого завдання через сенсорний екран Android.
Крок 1: Перевірте відсік акумулятора
Відкрийте відсік акумулятора і переконайтеся, що ключовий перемикач встановлений у положення ON. Закрийте відсік. Переконайтеся, що рівень заряду акумулятора перевищує 10% — при нижчому рівні робот відображає попередження та обмежує виконання завдань.
Крок 2: Встановіть робота на маркер
Перекотіть HolaBot у позицію безпосередньо під будь-яким підлоговим маркером у картографованій зоні. Ініціалізація за маркером надає роботу відому опорну точку для локалізації до того, як повноцінна SLAM-навігація візьме управління на себе.
Крок 3: Увімкніть робота
Натисніть і утримуйте кнопку живлення протягом приблизно 1 секунди. Світлова смуга LED заблимає, а на РК-екрані послідовно відобразяться логотип завантаження, анімація та робочий стіл Android — це підтверджує успішне завантаження. Програма Pudu запускається автоматично; якщо цього не сталося, натисніть на її значок на робочому столі Android.
Крок 4: Оберіть режим роботи
На головному екрані оберіть потрібний режим завдання: Доставка, Збір, Патрулювання або Прямий. У режимі доставки призначте пункти призначення лоткам, торкнувшись кожного на екрані та обравши номер столика, потім натисніть «Поїхали». У режимі збору оберіть до 20 точок підбору та натисніть «Поїхали» — робот автоматично прокладе оптимальний маршрут.
Крок 5: Спостереження та пауза
Торкніться екрана в будь-який момент, щоб поставити робота на паузу під час виконання завдання. У режимі патрулювання робот автоматично відновлює рух через 20 секунд, якщо не виконано жодних дій; у всіх інших режимах — через 10 секунд. Щоб повернути робота на станцію стикування в будь-який момент, торкніться екрана паузи та оберіть «Повернутися».
Яка максимальна вантажопідйомність PUDU HolaBot?
HolaBot витримує 15 кг на лоток на рівній поверхні, на чотирьох лотках, що дає загальне корисне навантаження 60 кг. При переїзді через поріг або перешкоду висотою 5 мм ліміт на лоток знижується до 10 кг для захисту вантажу та збереження стабільності.
Скільки режимів роботи має HolaBot?
HolaBot має чотири режими роботи: Доставка (відправка до кількох столиків із оптимальним маршрутом), Збір (підбір у до 20 точок та консолідація на станції повернення), Патрулювання (маршрут заданим колом із налаштовуваними зупинками) та Прямий (відправка до єдиного пункту без автоматичного повернення).
Яку технологію навігації використовує HolaBot?
HolaBot використовує інтегроване лазерно-візуальне позиціонування SLAM, поєднуючи лідар із кутом огляду 220° та дві глибинні RGB-D камери (верхня та нижня позиції) для повноохватного виявлення перешкод. Підтримуються три методи картографування: тільки маркери, тільки лазер або комбінація маркер + лазер.
Скільки часу працює акумулятор HolaBot і чи можна його замінити?
Акумулятор ємністю 25,6 Агод забезпечує до 12 годин роботи без навантаження. Блок акумулятора є знімним, що дозволяє безперервну роботу шляхом заміни зарядженого акумулятора. Час повного заряджання — 4,5 год. Для максимального ресурсу акумулятора підтримуйте рівень заряду вище 10% під час звичайної експлуатації.
Які канали виклику підтримує HolaBot?
HolaBot підтримує п'ять незалежних каналів виклику: смарт-годинник (через програму Pudu), цифрова консоль Pudulink, пейджер із модулем Lora, NFC-картка або браслет та акустичний зумер. Усі канали працюють незалежно і можуть одночасно використовуватися в одному об'єкті.
Чому обрати EXPERT3D?
EXPERT3D спеціалізується на передовій робототехніці та 3D-технологіях з 2012 року — понад десятиліття практичного досвіду у підборі, впровадженні та підтримці професійних платформ у ресторанах, готелях, лікарнях та промислових об'єктах по всій Іспанії та Європі. Ми надаємо технічні консультації перед продажем, координуємо доставку та забезпечуємо постпродажну підтримку безпосередньо через контакти з виробниками. Як офіційний представник PUDU, ми гарантуємо найкращу ціну, авторизований сервіс та офіційну гарантію. HolaBot — це складна система, яка виграє від правильного картографування об'єкта та початкового налаштування: наша команда супроводжує вас від знімання плану приміщення до запуску в промислову експлуатацію. Зв'яжіться з нами, щоб обговорити конкретні вимоги вашого об'єкта та поточну наявність.











")





