



- Наявність: У наявності
- Код товару: 00-00013723
- Вага брутто: 35.00kg
Unitree G1 Edu Flagship A-U3 — гуманоїдний робот для дослідницьких лабораторій та розробки втіленого штучного інтелекту з 43 ступенями свободи, восьмиядерним процесором і обчислювальним модулем NVIDIA Jetson Orin потужністю 100 Tops. Акумулятор ємністю 9000 мАг зі швидкою заміною, маніпулятори Dex3-1 з керуванням за силою та механізм складання до висоти 690 мм перетворюють платформу на повноцінний фізичний стенд для досліджень у сфері локомоції, маніпуляцій та навчання з підкріпленням у реальних умовах.
| Загальна кількість ступенів свободи | 43 |
|---|---|
| Обчислювальний модуль ШІ | NVIDIA Jetson Orin 100 Tops |
| Інтелектуальний акумулятор | 9000 мАг (швидка заміна) |
| Маса (з акумулятором) | ~35 кг |
Біомеханіка 43 ступенів свободи: локомоція без обмежень
Кінетична архітектура G1 Edu виходить за межі звичних двоногих дослідницьких платформ. Завдяки 6 ступеням свободи на ногу і 3 ступеням свободи поясу (Z±155°, X±45°, Y±30°) робот виконує патерни ходи на нерівних поверхнях, динамічні сальто назад і автономне відновлення після падіння — без будь-яких змін апаратного забезпечення.
PMSM-двигуни з внутрішнім ротором і низькою інерцією забезпечують швидку реакцію крутного моменту та ефективне розсіювання тепла. Хрестоворолікові підшипники промислового класу витримують високі навантаження протягом тисяч циклів ходьби без втрати точності. З 7 ступенями свободи на руку і максимальним крутним моментом коліна 120 Н·м G1 Edu вірно відтворює кінематичний простір дорослого оператора-людини.
- 6 ступенів свободи на ногу для всеспрямованого руху та нерівних поверхонь
- 3 ступені свободи поясу з обертанням Z±155° для широкого розвороту корпусу
- 7 ступенів свободи на руку для тривимірного робочого простору
- Максимальний крутний момент коліна: 120 Н·м — для підйому по сходах і відновлення після падіння
- Порожнисте прокладення кабелів у всіх суглобах захищає проводку при повторних навантаженнях
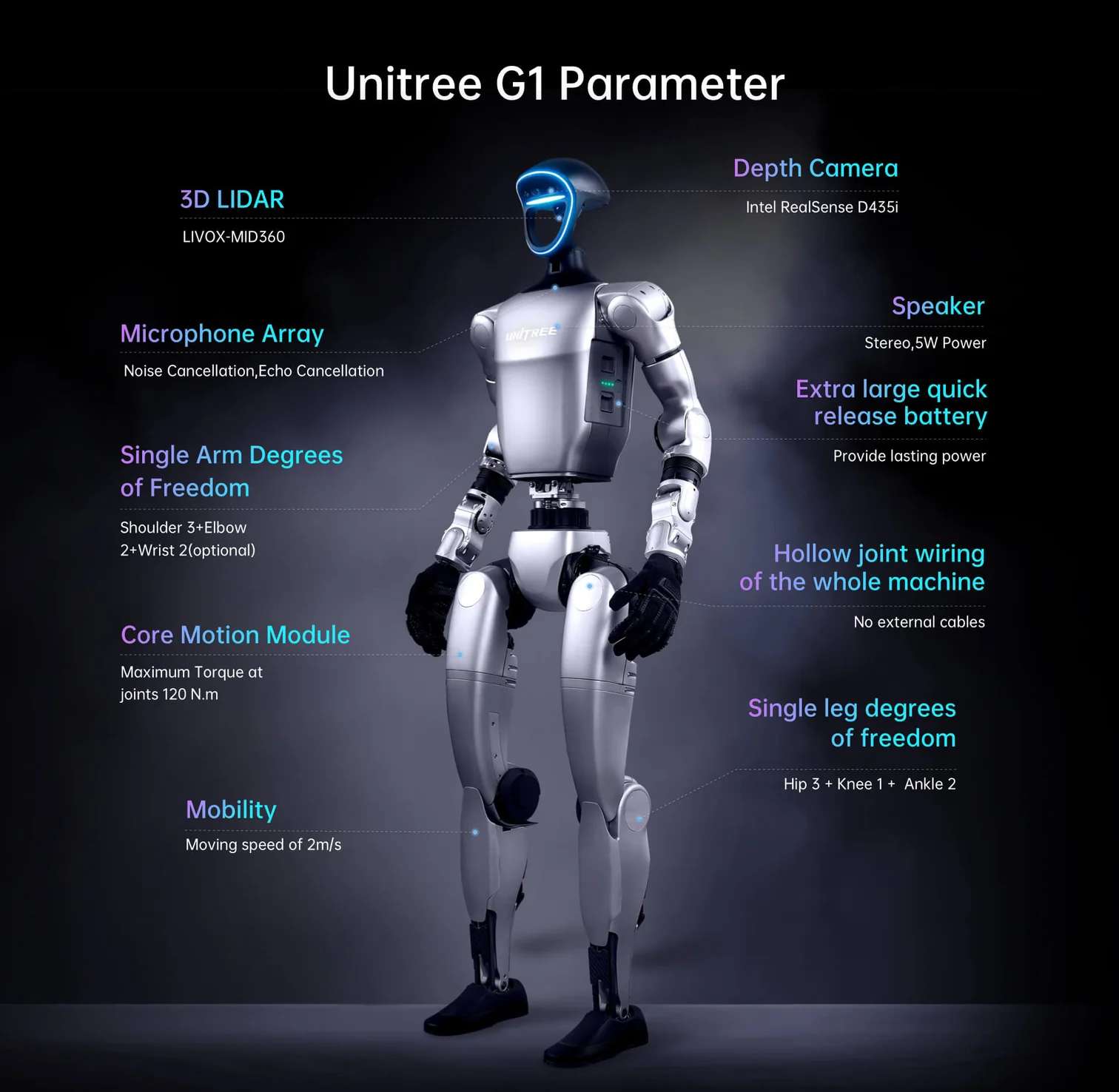
Дворівнева обчислювальна архітектура: 8-ядерний процесор + NVIDIA Jetson Orin 100 Tops
Ефективна гуманоїдна робототехніка потребує одночасної обробки сенсорних і моторних даних та виводу нейронних мереж. G1 Edu вирішує це за допомогою дворівневої архітектури: 8-ядерний процесор управляє низькозатримковим керуванням рухом, тоді як модуль NVIDIA Jetson Orin на 100 Tops виконує логічне виведення нейромережі для сприйняття та прийняття рішень.
Ця конфігурація є основою UnifoLM (Unitree Robot Unified Large Model) — уніфікованої великої моделі, яка застосовує навчання з підкріпленням і навчання наслідуванням безпосередньо на фізичному апаратному забезпеченні. Робот сприймає середовище за допомогою камери глибини та 3D LiDAR, реагує в реальному часі та вдосконалює поведінку через фізичну взаємодію — зменшуючи залежність від зовнішніх симуляторів у кожному циклі налаштування.
Маніпулятори Dex3-1: гібридне керування силою-положенням для точних завдань
Дослідження у сфері сервісної робототехніки вимагають маніпуляторів, здатних адаптувати силу захоплення відповідно до об'єкта. Маніпулятори Dex3-1 G1 Edu реалізують гібридне керування силою-положенням, яке розрізняє крихкі вироби — наприклад, електронні компоненти — і інструменти, що потребують міцного захоплення.

Кожна рука має 3 пальці та 2 незалежних ступені свободи (конфігурація A-U3, без інтегрованих тактильних датчиків). Максимальне навантаження на руку — ~3 кг, розмах рук — ~0.45 м, що відповідає робочому простору дорослої людини аналогічного зросту. Такий рівень спритності відкриває дослідницькі напрямки в монтажі, тонкому маніпулюванні та людино-роботизованій співпраці.
Портативна лабораторна платформа: складання до 690 мм, акумулятор зі швидкою заміною
Незважаючи на повний руховий потенціал, G1 Edu спроектовано для практичного використання в лабораторії та транспортування. Механізм складання зменшує висоту від 1320 мм до 690 мм, що дозволяє перевезення стандартним автомобілем і компактне зберігання в лабораторному приміщенні.
Інтелектуальний акумулятор ємністю 9000 мАг забезпечує близько 2 годин безперервної роботи і замінюється за лічені секунди завдяки механізму швидкого від'єднання. Зарядний пристрій, що входить до комплекту, працює при 54 В 5 А. Вдосконалене бездротове OTA-оновлення прошивки не переривається в процесі розробки, а підтримка вторинної розробки спрощує інтеграцію з середовищами ROS або власними фреймворками штучного інтелекту.
Технічна порада: Для максимального ресурсу PMSM-двигунів під час агресивних тестів локомоції використовуйте режим керування крутним моментом замість позиційного режиму при перевірці алгоритмів відновлення після падіння: це знижує пікові струми в приводах коліна до 30 % і суттєво подовжує термін служби хрестоворолікових підшипників.
Технічні характеристики Unitree G1 Edu Flagship A-U3
Розміри та маса
| Висота × Ширина × Глибина (стоячи) | 1320 × 450 × 200 мм |
|---|---|
| Висота × Ширина × Глибина (складено) | 690 × 450 × 300 мм |
| Маса (з акумулятором) | ~35 кг |
Ступені свободи
| Загальна кількість ступенів свободи | 43 |
|---|---|
| Ступені свободи на ногу | 6 |
| Ступені свободи поясу | 3 (Z±155°, X±45°, Y±30°) |
| Ступені свободи на руку | 7 |
| Ступені свободи на кисть | 2 × маніпулятори Dex3-1 (3 пальці, керування силою, без тактильних датчиків) |
Механіка та привід
| Вихідний підшипник суглоба | Хрестоворолікові підшипники промислового класу (висока точність, висока несуча здатність) |
|---|---|
| Двигун суглоба | PMSM з внутрішнім ротором і низькою інерцією (висока швидкість реакції та розсіювання тепла) |
| Максимальний крутний момент коліна | 120 Н·м |
| Максимальне навантаження на руку | ~3 кг |
| Довжина гомілки + стегна | 0.6 м |
| Розмах рук | ~0.45 м |
Кут руху суглобів
| Суглоб коліна | 0~165° |
|---|---|
| Суглоб стегна | P±154°, R-30~+170°, Y±158° |
| Суглоб зап'ястя | P±92.5°, Y±92.5° |
Електроніка та кабельне прокладення
| Порожнисте прокладення кабелів у всіх суглобах | Так |
|---|---|
| Енкодер суглоба | Подвійний енкодер |
| Система охолодження | Місцеве повітряне охолодження |
Обчислення та датчики
| Базова обчислювальна потужність | 8-ядерний процесор високої продуктивності |
|---|---|
| Обчислювальний модуль ШІ | NVIDIA Jetson Orin 100 Tops |
| Датчик виявлення | Камера глибини + 3D LiDAR |
| Аудіо | Матриця 4 мікрофонів, динамік 5 Вт |
| Підключення | WiFi 6, Bluetooth 5.2 |
Живлення та акумулятор
| Джерело живлення | 13-елементний літієвий акумулятор |
|---|---|
| Інтелектуальний акумулятор | 9000 мАг (швидка заміна) |
| Зарядний пристрій | 54 В 5 А |
| Час роботи від акумулятора | ~2 год |
Додаткові функції та обслуговування
| Ручний пульт дистанційного керування | Так |
|---|---|
| Покращене бездротове OTA-оновлення | Так |
| Вторинна розробка | Так |
| Захисна підставка | Так |
| Гарантія | 12 місяців |
| Технічна підтримка | Так (повна документація розробника та підтримка екосистеми) |
Чому обрати EXPERT3D?
У EXPERT3D, що спеціалізується на 3D-технологіях та передовій робототехніці з 2012 року, ви отримаєте персоналізовану технічну консультацію для підбору платформи, що найкраще відповідає вашим дослідницьким цілям. Наша команда супроводжує кожен етап проєкту — до, під час і після придбання — забезпечуючи успішну реалізацію ваших розробок. Замовляйте в EXPERT3D ➔ €




")
")









