")
")
")



- Наявність: У наявності
- Код товару: G1-D-Flagship
- Вага брутто: 80.00kg
Unitree G1-D Flagship — це колісний гуманоїдний сервісний робот, розроблений для стійкого комерційного розгортання: поєднує подвійні маніпулятори з 7 ступенями свободи кожен, висувну телескопічну колонку з регульованою висотою від 1260 до 1680 мм та процесор NVIDIA Jetson Orin NX з продуктивністю 100 TOPS для виводу штучного інтелекту на борту. Маючи масу близько 80 кг і систему подвійного акумулятора, платформа забезпечує до 6 годин автономної роботи шасі та максимальну робочу висоту ~2 м.
| Загальна кількість ст. св. (без кінцевого ефектора) | 19 (7×2 руки + 2 попереку + 1 колонка + 2 база) |
|---|---|
| Діапазон регульованої висоти | 1260–1680 мм (макс. робоча висота ~2 м) |
| Обчислювальний модуль ШІ | NVIDIA Jetson Orin NX — 100 TOPS |
| Час роботи акумулятора шасі | ~6 год (вбудований акумулятор 30 Аг) |
На відміну від двоногих гуманоїдів, які витрачають весь інженерний ресурс на підтримання динамічного балансу, G1-D Flagship спрямовує цей ресурс повністю на спритність маніпуляторів та інтелект для виконання завдань. Колісне шасі з диференційним приводом усуває складність стабілізації на двох ногах, дозволяючи верхній частині тіла зосередитися на точному маніпулюванні та сприйнятті. На зображенні нижче показано G1-D у ролі автономного бариста — робот впевнено керує обладнанням для приготування кави, що вимагає делікатного поводження з об'єктами та надійної повторюваності позиціонування.

Телескопічна колонка: від рівня підлоги до 2 м робочого охоплення
Ключове механічне рішення в конструкції G1-D — це підіймальна телескопічна колонка. Вона проходить 450 мм вертикального ходу зі швидкістю до 60 мм/с та точністю позиціонування 1 мм. На мінімальній висоті робот має 1260 мм — компактно для завдань на рівні підлоги та прохід у стандартні дверні прорізи. На максимальній висоті — 1680 мм, що підіймає робочий простір маніпуляторів до ~2 м над рівнем землі. Цей діапазон охоплює практично будь-яку висоту полиць у роздрібній торгівлі, складських та лабораторних середовищах. Попереку робота одночасно обертається в межах Z±155° та нахиляється в діапазоні Y від -2,5° до +135°, дозволяючи маніпуляторам охоплювати простір від рівня нижче шасі до значно вище голови без переміщення бази.
Діаграма нижче ілюструє параметри вертикального ходу та повний діапазон рухів попереку, що разом визначають розширений робочий простір G1-D — на ній показано робота, який захоплює стандартну вантажну коробку на висоті конвеєра.

Маніпулятори з 7 ступенями свободи та модульна система кінцевих ефекторів
Кожен маніпулятор має 7 активних ступенів свободи: нахил плеча, відведення плеча, обертання плеча, лікоть, обертання зап'ястя, нахил зап'ястя та рискання зап'ястя. Маніпулятори з 7 ступенями свободи є еталонним стандартом у прецизійній роботизованій маніпуляції — вони дозволяють безперервний рух у нульовому просторі, тобто робот може переорієнтовувати зап'ястя без переміщення кінцевого ефектора, що принципово важливо у стиснених робочих просторах. Максимальне корисне навантаження одного маніпулятора становить ~3 кг при досяжності ~0,45 м, що охоплює маси об'єктів у роздрібній торгівлі, громадському харчуванні, логістиці та легкому складанні.
Кінцевий ефектор навмисно не є фіксованим. Залежно від застосування доступні чотири варіанти: двопальцевий захват з силовим керуванням, трипальцева спритна рука без тактильних сенсорів, трипальцева спритна рука з тактильними сенсорами для завдань, що потребують зворотного зв'язку про контакт, і п'ятипальцева спритна рука для найбільш антропоморфних вимог до маніпуляції. Анотована діаграма нижче показує обидві висотні конфігурації та повний перелік сумісних кінцевих ефекторів у контексті.

Платформа з 19 ступенями свободи: кінематична архітектура
19 загальних ступенів свободи тіла (без кінцевих ефекторів) розподілені з навмисною точністю. Маніпулятори забезпечують 14 ст. св. (7 на кожен), надаючи кожній кінцівці ту саму кінематичну надлишковість, що і в промислових колаборативних роботизованих руках. Два ступені свободи попереку дозволяють тулубу повертатися та нахилятися незалежно, відокремлюючи орієнтацію маніпуляторів від курсу шасі. Один ступінь свободи колонки забезпечує вертикальне регулювання висоти. Два базові ступені свободи відповідають диференційному управлінню шасі: поздовжня швидкість та кутова швидкість рискання. При встановленні двопальцевого захвату на кожен маніпулятор загальна кількість зростає до 21 ст. св..
Діаграма специфікацій платформи нижче підсумовує повний розподіл ступенів свободи по підсистемах, підтверджуючи, що архітектура одного маніпулятора з 7 ступенями свободи відповідає кінематичній потужності окремої промислової колаборативної руки.

Керування з низькою затримкою: VR-телеоперування та прецизійне позиціонування
Телеоперування з високою точністю — це основний механізм збору демонстраційних даних для навчання автономних стратегій. Система керування G1-D забезпечує затримку системи телеоперування <100 мс при частоті дискретизації 60 Гц — достатньо швидко, щоб оператор у VR-гарнітурі відчував переконливе відчуття присутності під час прецизійного маніпулювання. Точність позиціонування колонки при VR-телеоперуванні досягає ±0,5 мм; точність захвату кінцевого ефектора становить ±0,1 мм (залежить від конфігурації ефектора). Ці допуски критично важливі для таких завдань, як підбирання дрібних компонентів, вставлення з'єднувачів або складання гнучких матеріалів, де неточне відтворення нівелює цінність демонстрації.
На зображенні нижче показано оператора, який виконує VR-телеоперування разом із G1-D, ілюструючи ключові параметри відгуку системи керування, що роблять масштабний збір якісних даних практичним.

Колісне шасі та автономна SLAM-навігація
Мобільна база працює на диференційному приводі з двома незалежними ведучими колесами, підтримує обертання на 360° на місці та максимальну швидкість руху 1,5 м/с. Вбудовані сенсори шасі включають 3D LiDAR, дві камери глибини, два датчики фізичного зіткнення та два датчики виявлення низьких перешкод — сенсорний набір, що дозволяє роботу будувати карти, визначати своє місцезнаходження, уникати динамічних перешкод та автономно повертатися на зарядну станцію. Навігація керується через сервіс SLAM, доступний через REST API, з підтримкою точок інтересу, віртуальних стін, заборонених зон та маршрутів із кількома точками. Вбудований акумулятор шасі ємністю 30 Аг живить базу протягом приблизно 6 годин до наступного стикування. На зображенні нижче показано G1-D за виконанням завдання складання одягу в домашній спальні — ілюстративний сценарій, де шасі переміщається до робочого місця, а колонка налаштовує висоту під поверхню ліжка.

Наскрізна платформа ШІ: від даних до розгорнутої стратегії
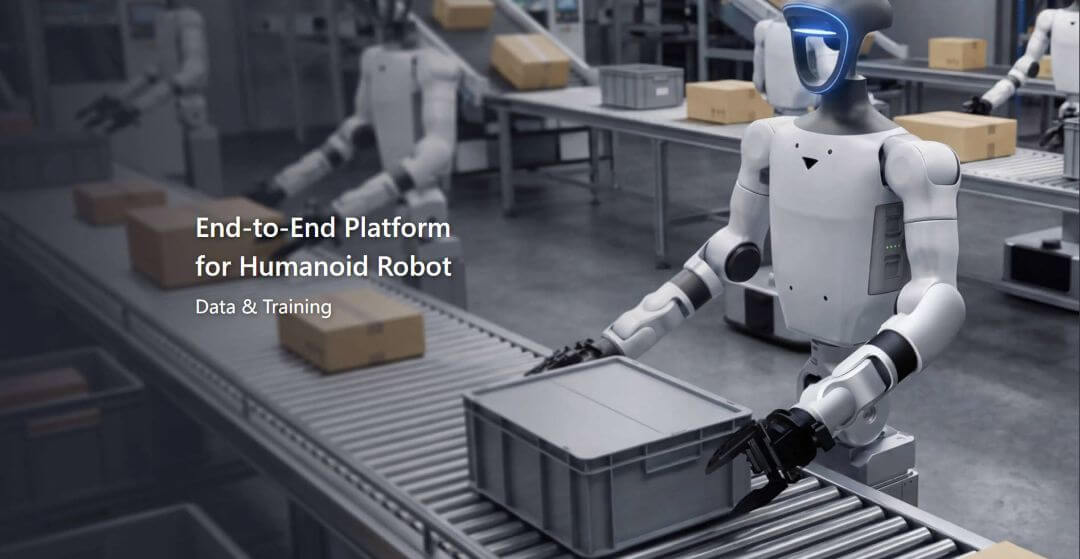
G1-D — це не просто робот, а фізичний вузол виконання повноцінного стека розробки втіленого ШІ. Платформа Unitree інтегрує три взаємопов'язані шари: оптимізований конвеєр збору даних, комплексне середовище навчання та виводу моделей, і архітектуру «модель світу — дія» UnifoLM-WMA-0. Конвеєр даних стандартизує збір за допомогою візуального керування шаблонами, генерації завдань одним кліком, планування з високим паралелізмом для сотень роботів одночасно та безперервного цілодобового збору — все з виводом безпосередньо у провідні формати навчання.
На зображенні нижче показано кілька одиниць G1-D, що працюють на промисловій складальній лінії — сценарій масштабного збору даних, який забезпечується конкурентною архітектурою платформи.
UnifoLM-WMA-0: архітектура «модель світу — дія»
Шар навчання моделей підтримує розподілене навчання з завантаженням GPU до 90%, інтеграцію з програмами з відкритим кодом, включаючи PI та GROOT, розгортання одним кліком і середовище симуляції з високою точністю для оцінки стратегій перед фізичним впровадженням. У центрі — UnifoLM-WMA-0, відкрита архітектура Unitree, що охоплює кілька роботичних втілень. Вона функціонує у двох режимах: режим прийняття рішень, що передбачає майбутні фізичні взаємодії для керування виконанням стратегії, та режим симуляції, який генерує синтетичні навчальні дані з високою точністю на основі вхідних даних руху робота. Повний конвеєр Sim2Real задокументований і підтримується.
Застосування в сервісі, роздрібній торгівлі та промисловій інспекції
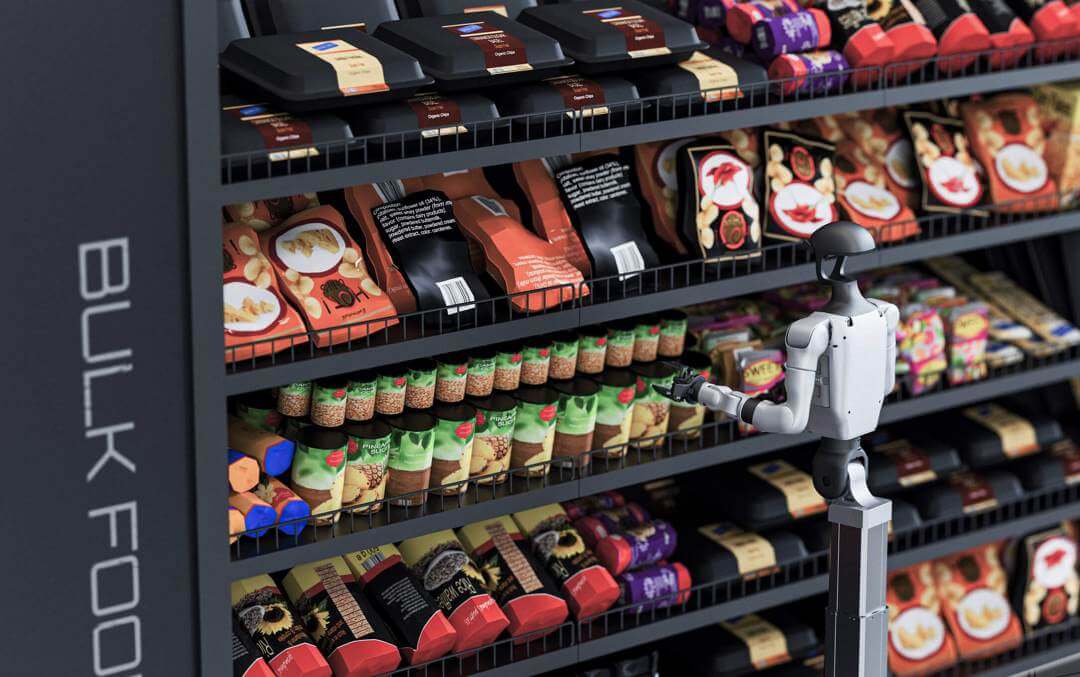
Змінне охоплення та автономія SLAM G1-D дозволяють його практичне розгортання у трьох основних напрямках. У роздрібних середовищах робот може переміщатися між торговельними рядами, ідентифікувати позиції на полицях за допомогою бортових камер та поповнювати товари без участі людини. На зображенні нижче показано G1-D, який обробляє фасовану продукцію у секції сипучих продуктів — завдання, що вимагає точної ідентифікації об'єктів, контрольованого прикладання сили та надійного просторового позиціонування.
У промислових контекстах та центрах обробки даних здатність G1-D переміщатися у вузьких проходах, висувати колонку до верхніх позицій стелажів та контрольовано прикладати зусилля через маніпулятори робить його придатним інструментом для інспекції обладнання, управління кабелями та роботи з компонентами. На зображенні нижче показано платформу, що працює в серверній кімнаті — просторі з вузькими проходами, вертикально згрупованим обладнанням та необхідністю дуже точних рухів маніпуляторів без непередбаченого контакту.

Технічні характеристики Unitree G1-D Flagship
Механічні розміри
| Модель | G1-D Flagship |
|---|---|
| Габаритні розміри (мін. висота колонки) | ~1260 × 525 × 570 мм |
| Габаритні розміри (макс. висота колонки) | ~1680 × 525 × 570 мм |
| Загальна маса (з акумулятором) | ~80 кг |
| Система охолодження | Локальне повітряне охолодження |
Ступені свободи
| Загальна кількість ст. св. (без кінцевого ефектора) | 19 |
|---|---|
| Ст. св. одного маніпулятора (без кінцевого ефектора) | 7 |
| Ст. св. попереку | 2 |
| Ст. св. колонки | 1 |
| Ст. св. бази | 2 |
| Загальна кількість ст. св. із двопальцевим захватом ×2 | 21 (19 + 1 на захват × 2) |
Характеристики маніпуляторів
| Максимальне корисне навантаження одного маніпулятора | ~3 кг |
|---|---|
| Досяжність маніпулятора (без кінцевого ефектора) | ~0,45 м |
| Варіанти кінцевих ефекторів | Двопальцевий захват / Трипальцева спритна рука (без тактильних сенсорів) / Трипальцева спритна рука (з тактильними сенсорами) / П'ятипальцева спритна рука |
Діапазон рухів колонки та попереку
| Хід підйому колонки | 450 мм |
|---|---|
| Швидкість підйому колонки | Макс. 60 мм/с |
| Точність підйому (загальна робота) | 1 мм |
| Точність підйому (VR-телеоперування) | ±0,5 мм |
| Максимальна робоча висота | ~2 м |
| Діапазон руху попереку — вісь Z | ±155° |
| Діапазон руху попереку — вісь Y | від -2,5° до +135° |
Характеристики шасі
| Розміри шасі (Д × Ш × В) | 570 × 525 × 197 мм |
|---|---|
| Тип приводу | Диференційний привід — підтримує обертання на 360° на місці |
| Максимальна швидкість руху | 1,5 м/с |
| Сенсори шасі | LiDAR ×1 + Камера глибини ×2 + Датчик фізичного зіткнення ×2 + Датчик виявлення низьких перешкод ×2 |
Обчислення та штучний інтелект
| Базова обчислювальна потужність | 8-ядерний високопродуктивний процесор |
|---|---|
| Модуль обчислень з високою продуктивністю | NVIDIA Jetson Orin NX 16 ГБ (100 TOPS) |
Сенсори та сприйняття
| HD-бінокулярна камера на голові | ×1 — кут огляду: Г 115°, В 80°, Д 125° — роздільна здатність: 3840 × 1200 |
|---|---|
| HD-камера на зап'ясті | ×2 — кут огляду: Г 130°, В 60°, Д 160° — роздільна здатність: 1920 × 1080 |
| LiDAR бази | ×1 |
| Камера глибини бази | ×2 |
| Датчик фізичного зіткнення (база) | Присутній |
| Датчик виявлення низьких перешкод (база) | Присутній |
Аудіо та взаємодія
| Масив мікрофонів | Лінійний масив із 4 мікрофонів, відстань між ними 20 мм |
|---|---|
| Динамік | 8 Ом 3 Вт (5 Вт пік) |
| RGB-підсвічування | 256 кольорів |
| Розпізнавання мовлення (ASR) | Локальна автономна модель |
| Синтез мовлення (TTS) | Локальний автономний синтез — китайська та англійська |
Підключення
| WiFi | WiFi 6 |
|---|---|
| Bluetooth | Bluetooth 5.2 |
Керування та телеоперування
| Затримка системи телеоперування | <100 мс |
|---|---|
| Частота дискретизації | 60 Гц |
| Точність захвату кінцевого ефектора | ±0,1 мм (залежить від конфігурації ефектора) |
Живлення та акумулятор — верхня частина тіла
| Живлення верхньої частини тіла | Акумулятор або пряме підключення кабелем |
|---|---|
| Ємність акумулятора верхньої частини (швидке від'єднання) | 9000 мАг |
| Час роботи акумулятора верхньої частини | ~2 год |
| Зарядний пристрій верхньої частини | 54 В / 5 А |
Живлення та акумулятор — шасі
| Живлення шасі | Акумулятор / зарядна станція |
|---|---|
| Ємність акумулятора шасі (вбудований) | 30 Аг |
| Час роботи акумулятора шасі | ~6 год |
| Зарядна станція шасі | 51 В / 10 А |
Програмне забезпечення та розробка
| SDK | unitree_sdk2 (на основі SDK для G1) |
|---|---|
| SLAM-навігація |
Так — REST API, підтримка
Нещодавно переглянуті товари")
")
Новинка
Бренд: Unitree
Код товару: G1-D-Flagship
Unitree G1-D Flagship — це колісний гуманоїдний сервісний
робот, розроблений для стійкого комерційного розгортання: поєднує подвійні
маніпулятори ..
59 000€
Без ПДВ:48 760€


Новинка
Бренд: Unitree
Код товару: G1-AIR
Unitree G1 AIR — компактний повністю електричний гуманоїдний робот, розроблений для професійних демонстрацій, публічних заходів і виставкових показів ..
24 805€
Без ПДВ:20 500€
Бренд: Unitree
Код товару: 00-00013727
Unitree G1 Edu Standard-U1 — компактний гуманоїдний робот, розроблений для поглиблених досліджень у сфері штучного інтелекту та освітньої робототехнік..
35 000€
Без ПДВ:28 926€
Бренд: Unitree
Код товару: 00-00013725
Unitree G1 Edu Flagship C-U5 — повнорозмірний робот-гуманоїд, розроблений для передових досліджень у сфері штучного інтелекту, експериментів із втілен..
69 900€
Без ПДВ:57 769€
Бренд: Unitree
Код товару: 00-00013724
Unitree G1 Edu Flagship B-U4 — гуманоїдний робот повного зросту для університетів, дослідницьких лабораторій та спеціалізованих програм у галузі робот..
62 900€
Без ПДВ:51 983€
Бренд: Unitree
Код товару: 00-00013722
Unitree G1 Edu Advanced-U2 — це гуманоїдний робот дослідницького класу з 29 ступенями свободи, розроблений для університетів, лабораторій НДДКР і кома..
41 900€
Без ПДВ:34 628€
Бренд: Unitree
Код товару: 00-00013723
Unitree G1 Edu Flagship A-U3 — гуманоїдний робот для дослідницьких лабораторій та розробки втіленого штучного інтелекту з 43 ступенями свободи, восьми..
53 900€
Без ПДВ:44 545€
Бренд: Unitree
Код товару: 00-00013726
Unitree G1 Edu Flagship D-U6 — гуманоїдний дослідницький робот із 41 ступенем свободи, розроблений для втіленого штучного інтелекту та алгоритмів прос..
69 000€
Без ПДВ:57 025€
Новинка
Бренд: Unitree
Код товару: RB-G1-U7-EDU
UNITREE G1-U7 EDU — повнорозмірний гуманоїдний робот, призначений для академічних досліджень, промислової автоматизації та розробки систем штучного ін..
64 900€
Без ПДВ:53 636€
Новинка
Бренд: Unitree
Код товару: G1-U8-EDU
Unitree G1-U8 EDU — гуманоїдний робот повного зросту, розроблений для наукових досліджень у галузі робототехніки, поглибленої освіти та прототипування..
58 000€
Без ПДВ:47 934€
Новинка
Бренд: Unitree
Код товару: G1-U9-EDU
UNITREE G1-U9 EDU — це повнорозмірний гуманоїдний робот, розроблений для передових наукових досліджень та промислової автоматизації: висота 1 320 мм, ..
59 000€
Без ПДВ:48 760€
Новинка
Бренд: Unitree
Код товару: G1-U10-EDU
Гуманоїдний робот Unitree G1-U10 EDU — це повнорозмірна дослідницька платформа, розроблена для навчання з наслідування на основі штучного інтелекту, с..
54 000€
Без ПДВ:44 628€


Новинка
Бренд: Unitree
Код товару: G1-COMP-EDU
Unitree G1-Comp EDU — це повнорозмірний бімануальний
гуманоїдний робот, розроблений спеціально для змагальної робототехніки та
передових університ..
46 900€
Без ПДВ:38 760€


Бренд: Unitree
Код товару: 00-00013716
Розкрийте повний потенціал
інтегрованого штучного інтелекту разом із
роботом-собакою Unitree Go2 Edu Intelligent U2 —
передовою чотириноговою пл..
17 500€
Без ПДВ:14 463€
Бренд: Unitree
Код товару: 00-00013717
Робопес Unitree Go2 Intelligent Laser U3: Майбутнє робототехніки на основі ШІ
Розкрийте весь
потенціал штучного інтелекту разом із робопесом
U..
18 900€
Без ПДВ:15 620€
Бренд: Unitree
Код товару: 00-00013715
Відкрийте для себе робопса Unitree Go2 Edu Flagship U4
Розкрийте повний потенціал вбудованого штучного інтелекту разом із
робопсом Unitree ..
20 495€
Без ПДВ:16 938€

Новинка
Бренд: PUDU
Код товару: 00-00014079
PUDU MT1 Max автономний промисловий робот для прибирання з AI
PUDU MT1 Max — це сучасний робот для автоматизованого прибирання, створений для роботи ..
24 079€
Без ПДВ:19 900€


Новинка
Бренд: PUDU
Код товару: 00-00014081
PUDU CC1 Pro інтелектуальний робот для прибирання з AI
PUDU CC1 Pro — це сучасне автономне рішення для повного догляду за підлогами в комерційних при..
24 200€
Без ПДВ:20 000€

Новинка
Бренд: PUDU
Код товару: 00-00014080
PUDU CC1 Black Pro інтелектуальний робот для прибирання з AI
PUDU CC1 Black Pro — це вдосконалена версія серії CC1, створена для повністю автономного..
25 410€
Без ПДВ:21 000€


Новинка
Бренд: PUDU
Код товару: 00-00014083
PUDU BellaBot Pro (White) інтелектуальний робот для доставки та реклами
PUDU BellaBot Pro (White) — це сучасний автономний сервісний робот, створений..
13 310€
Без ПДВ:11 000€


Новинка
Бренд: PUDU
Код товару: 00-00014082
PUDU BellaBot Pro (Black) інтелектуальний робот для доставки та реклами
PUDU BellaBot Pro (Black) — це сучасний автономний сервісний робот, розроблен..
13 310€
Без ПДВ:11 000€
Новинка
Бренд: Unitree
Код товару: G1-AIR
Unitree G1 AIR — компактний повністю електричний гуманоїдний робот, розроблений для професійних демонстрацій, публічних заходів і виставкових показів ..
24 805€
Без ПДВ:20 500€
Бренд: Unitree
Код товару: 00-00013727
Unitree G1 Edu Standard-U1 — компактний гуманоїдний робот, розроблений для поглиблених досліджень у сфері штучного інтелекту та освітньої робототехнік..
35 000€
Без ПДВ:28 926€
Бренд: Unitree
Код товару: 00-00013725
Unitree G1 Edu Flagship C-U5 — повнорозмірний робот-гуманоїд, розроблений для передових досліджень у сфері штучного інтелекту, експериментів із втілен..
69 900€
Без ПДВ:57 769€
Бренд: Unitree
Код товару: 00-00013724
Unitree G1 Edu Flagship B-U4 — гуманоїдний робот повного зросту для університетів, дослідницьких лабораторій та спеціалізованих програм у галузі робот..
62 900€
Без ПДВ:51 983€
Бренд: Unitree
Код товару: 00-00013722
Unitree G1 Edu Advanced-U2 — це гуманоїдний робот дослідницького класу з 29 ступенями свободи, розроблений для університетів, лабораторій НДДКР і кома..
41 900€
Без ПДВ:34 628€
Бренд: Unitree
Код товару: 00-00013723
Unitree G1 Edu Flagship A-U3 — гуманоїдний робот для дослідницьких лабораторій та розробки втіленого штучного інтелекту з 43 ступенями свободи, восьми..
53 900€
Без ПДВ:44 545€
Бренд: Unitree
Код товару: 00-00013726
Unitree G1 Edu Flagship D-U6 — гуманоїдний дослідницький робот із 41 ступенем свободи, розроблений для втіленого штучного інтелекту та алгоритмів прос..
69 000€
Без ПДВ:57 025€
Новинка
Бренд: Unitree
Код товару: RB-G1-U7-EDU
UNITREE G1-U7 EDU — повнорозмірний гуманоїдний робот, призначений для академічних досліджень, промислової автоматизації та розробки систем штучного ін..
64 900€
Без ПДВ:53 636€
Новинка
Бренд: Unitree
Код товару: G1-U8-EDU
Unitree G1-U8 EDU — гуманоїдний робот повного зросту, розроблений для наукових досліджень у галузі робототехніки, поглибленої освіти та прототипування..
58 000€
Без ПДВ:47 934€
Новинка
Бренд: Unitree
Код товару: G1-U9-EDU
UNITREE G1-U9 EDU — це повнорозмірний гуманоїдний робот, розроблений для передових наукових досліджень та промислової автоматизації: висота 1 320 мм, ..
59 000€
Без ПДВ:48 760€
Ще не маєте облікового запису?
|