



- Наявність: У наявності
- Код товару: 00-00013724
- Вага брутто: 35.00kg
Unitree G1 Edu Flagship B-U4 — гуманоїдний робот повного зросту для університетів, дослідницьких лабораторій та спеціалізованих програм у галузі робототехніки. Він має 43 ступені свободи, систему спритних рук Dex3-1 із 33 тактильними сенсорами на кожній руці та модуль NVIDIA Jetson Orin потужністю 100 TOPS для обчислень штучного інтелекту безпосередньо на борту — все у корпусі, що складається з 1320 мм до 690 мм для транспортування.
| Загальна кількість ступенів свободи | 43 |
|---|---|
| Модуль ШІ | NVIDIA Jetson Orin, 100 TOPS |
| Розумна батарея | 9000 mAh, ~2 год автономної роботи |
| Максимальний крутний момент колінного суглоба | 120 N.m |
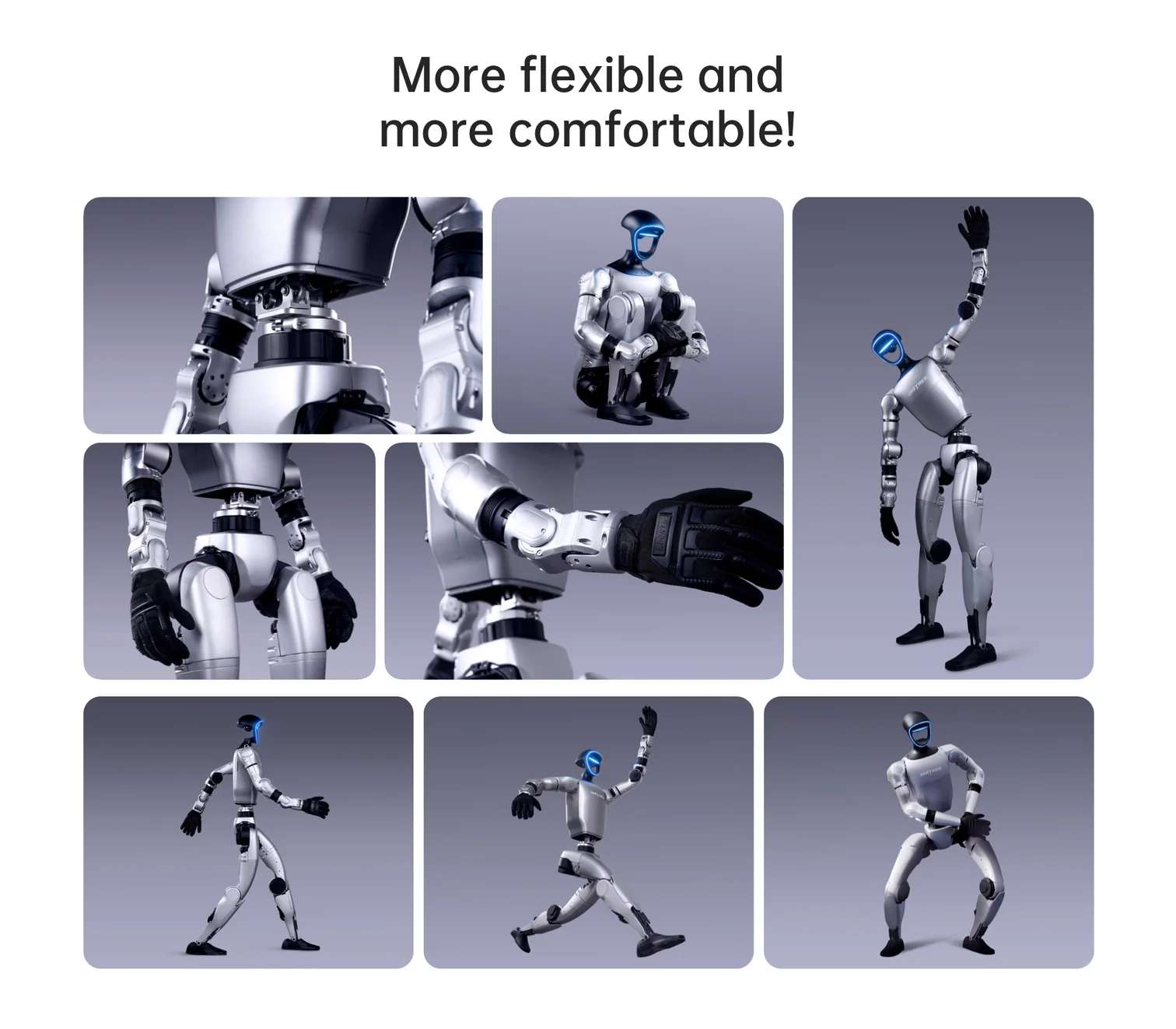
Архітектура руху: що означають 43 ступені свободи
Більшість гуманоїдних роботів жертвують або діапазоном руху, або крутним моментом. G1 Edu Flagship B-U4 не поступається ні тим, ні іншим. Кожна нога має 6 ступенів свободи, поперек додає 3 ступені свободи, кожна рука — ще 7 ступенів свободи, що формує кінематичний діапазон, який точно відтворює біомеханіку людини. Колінний суглоб витримує до 120 N.m крутного моменту — достатньо для динамічного відновлення рівноваги після спотикання або утримання статичного положення присідання під навантаженням.
Кожен суглоб оснащено двигуном PMSM із внутрішнім ротором низької інерції та високої швидкості (синхронний двигун на постійних магнітах) у поєднанні з промисловими хрестовими роликовими підшипниками. Конфігурація подвійного енкодера на кожному суглобі зменшує похибку позиціонування і забезпечує контуру керування зворотний зв'язок, необхідний для стабільної динамічної ходи. Результат: робот здатен самостійно відновлюватись після падіння, долати нерівний рельєф і за відповідного режиму навчання виконувати акробатичні маневри.
На зображенні нижче показано G1 у повному діапазоні руху — від вертикальної ходи до глибокого присідання, що наочно демонструє практичне охоплення кінематичної оболонки з 43 ступенями свободи.
Діапазон руху суглобів
Кутові діапазони кожного суглоба — ось що відрізняє дослідницьке апаратне забезпечення від комерційних коботів. Один лише поперек охоплює Z±155° рискання, надаючи верхній частині тіла обертання, порівнянне з поворотом людини в положенні сидячи. Рискання стегна сягає Y±158°, а згинання коліна — від 0° до 165°, що достатньо для повного опускання на коліно.
Втілений ШІ: UnifoLM та навчання на борту
У обчислювальному ядрі знаходиться Уніфікована велика модель роботів Unitree (UnifoLM), що виконується на нейронному процесорі Jetson Orin потужністю 100 TOPS. Ця архітектура підтримує навчання з наслідування та навчання з підкріпленням безпосередньо на роботі — без зовнішнього сервера для інференсу. Платформа здатна адаптувати свою ходу та стратегію маніпулювання до нових об'єктів і середовищ у реальному часі, що робить її справжнім стендом для досліджень у галузі втіленого ШІ.
Набір сенсорів підкріплює ці обчислювальні можливості: камера глибини забезпечує просторове картографування на близькій відстані, а 3D LiDAR — виявлення перешкод на далекій дистанції. Масив із 4 мікрофонів і динамік 5 W підтримують конвеєри голосових команд та експерименти з діалогу між людиною та роботом.
Руки Dex3-1: дослідницька платформа для дрібної моторики
Версія B-U4 постачається з двома триперстими спритними руками Dex3-1, кожна з яких містить 33 тактильні сенсори, розміщені на кінчиках пальців і долоні. Гібридне керування силою та позицією дозволяє руці плавно перемикатися між піддатливим захватом і жорстким позиціонуванням. Кожна рука може підняти до ~3 kg при розмаху приблизно 0,45 M.
На фотографії нижче — рука Dex3-1 у момент точного контакту з невеликим об'єктом, що наочно демонструє тактильну роздільність кінчиків пальців, яка уможливлює маніпуляції з керуванням силою.

Ця архітектура підтримує дослідження в галузі маніпуляцій, натхненних протезуванням, використання інструментів, обробки текстилю та будь-яких застосувань, де жорсткий захват пошкодить об'єкт роботи. Сенсинг сили також уможливлює виявлення контакту для безпечніших експериментів з фізичної взаємодії людини та робота.
Компактний форм-фактор: польові дослідження без вантажного автомобіля
У вертикальному положенні розміри становлять 1320 × 450 × 200 мм; у складеному вигляді робот зменшується до 690 × 450 × 300 мм. При масі приблизно 35 kg з батареєю команда з двох осіб може завантажити його у стандартний автомобіль без підйомного обладнання. Це робить зовнішні дослідження локомоції, тести на подолання рельєфу та багатомайданчикові експерименти реально здійсненними.
Технічна порада: Перед транспортуванням G1 у складеному положенні переконайтесь, що захисна опора задіяна, а гальма всіх суглобів увімкнені через пульт дистанційного керування. Батарея 9000 mAh зі швидким від'єднанням має бути знята для авіаперельотів відповідно до правил IATA щодо літій-іонних акумуляторів. Після прибуття скористайтесь системою OTA для перевірки актуальності мікропрограми перед першим сеансом — Unitree регулярно випускає оновлення стабільності.
Екосистема розробки: відкрита платформа для вторинних досліджень
Unitree G1 Edu Flagship B-U4 підтримує вторинну розробку через опублікований SDK та повні посібники розробника. 8-ядерний процесор керує керуванням рухом у реальному часі, тоді як Jetson Orin паралельно обробляє сприйняття та завдання ШІ. Підключення через WiFi 6 і Bluetooth 5.2 забезпечує дротовий і бездротовий обмін даними зі станціями ROS/ROS2. Система розширеного інтелектуального OTA дозволяє дистанційно оновлювати мікропрограму — необхідно для організацій, що експлуатують кілька одиниць на різних об'єктах.
Повний порожній електричний кабельний ввід через кожен суглоб гарантує, що прокладання кабелів не обмежує діапазон руху — практична необхідність для будь-якої конфігурації, що вимагає від робота досягати предметів позаду себе або перетинати центральну лінію.
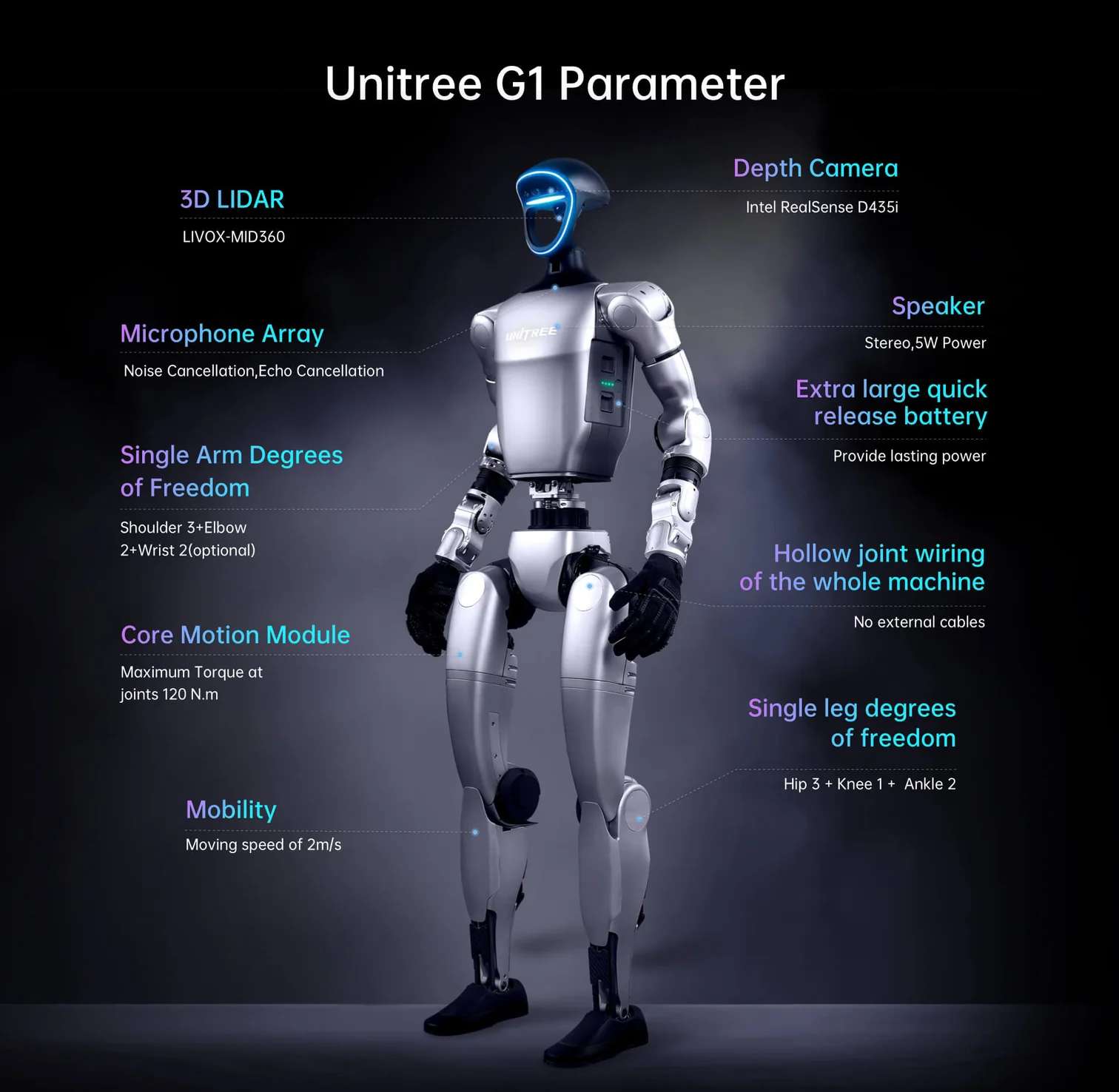
Зображення технічного огляду нижче надає підписаний вигляд основних підсистем G1 — пропорцій шасі, розташування суглобів і розміщення сенсорів — зручний довідник при плануванні завдань інтеграції.
Технічні характеристики гуманоїдного робота Unitree G1 Edu Flagship B-U4
Фізичні розміри
| Модель | G1 Edu Flagship B-U4 |
|---|---|
| Висота × Ширина × Глибина (стоячи) | 1320 × 450 × 200 мм |
| Висота × Ширина × Глибина (складений) | 690 × 450 × 300 мм |
| Маса (з батареєю) | ~35 kg |
| Довжина гомілки + стегна | 0,6 M |
| Розмах рук | ~0,45 M |
Ступені свободи
| Загальна кількість ступенів свободи | 43 |
|---|---|
| Ступені свободи ноги | 6 |
| Ступені свободи попереку | 3 |
| Ступені свободи руки | 7 |
| Ступені свободи кисті | 2 × триперсті спритні руки Dex3-1 із силовим керуванням (33 тактильні сенсори на руку) |
Характеристики суглобів
| Вихідний підшипник суглоба | Промислові хрестові роликові підшипники (висока точність, висока вантажопідйомність) |
|---|---|
| Двигун суглоба | PMSM із внутрішнім ротором низької інерції та високої швидкості (синхронний двигун на постійних магнітах) |
| Максимальний крутний момент колінного суглоба | 120 N.m |
| Максимальне навантаження руки | ~3 kg |
| Повний порожній електричний ввід у суглобах | Так |
| Кодування суглобів | Подвійний енкодер |
| Система охолодження | Місцеве повітряне охолодження |
Простір руху суглобів
| Діапазон руху суглоба попереку | Z±155°, X±45°, Y±30° |
|---|---|
| Діапазон руху колінного суглоба | 0~165° |
| Діапазон руху кульшового суглоба | P±154°, R-30~+170°, Y±158° |
| Діапазон руху суглоба зап'ястка | P±92,5°, Y±92,5° |
Обчислення та штучний інтелект
| Базова обчислювальна потужність | 8-ядерний високопродуктивний процесор |
|---|---|
| Модуль обчислень підвищеної потужності | NVIDIA Jetson Orin, 100 TOPS |
Сенсори та підключення
| Сенсор виявлення | Камера глибини + 3D LiDAR |
|---|---|
| Мікрофон | Масив із 4 мікрофонів |
| Динамік | 5 W |
| Бездротове підключення | WiFi 6, Bluetooth 5.2 |
Система живлення
| Джерело живлення | 13-секційна літієва батарея |
|---|---|
| Ємність розумної батареї | 9000 mAh (швидке від'єднання) |
| Зарядний пристрій | 54 V 5 A |
| Час роботи від батареї | ~2 год |
Розробка та підтримка
| Ручний пульт дистанційного керування | Так |
|---|---|
| Розширений інтелектуальний OTA | Так |
| Вторинна розробка | Так |
| Захисна опора | Так |
| Гарантія | 12 місяців |
| Технічна підтримка | Так — повні посібники розробника та підтримка екосистеми включені |
Чому обрати EXPERT3D?
EXPERT3D — спеціаліст у галузі 3D-технологій і передової робототехніки з 2012 року. Наша команда надає персоналізовані консультації перед покупкою для підбору апаратного забезпечення відповідно до ваших дослідницьких цілей, супровід на всіх етапах придбання та спеціалізовану технічну допомогу після доставки. Ми тримаємо повну екосистему Unitree G1 на складі та можемо надати рекомендації щодо інтеграції з середовищами ROS2, підключення до обчислювальних кластерів і конфігурацій безпеки в лабораторії. Довірте понад десятиліття прикладного досвіду для захисту ваших інвестицій.




")
")









