



- Наявність: У наявності
- Код товару: G1-COMP-EDU
- Вага брутто: 68.00kg
Unitree G1-Comp EDU — це повнорозмірний бімануальний гуманоїдний робот, розроблений спеціально для змагальної робототехніки та передових університетських досліджень. Висота платформи становить приблизно 130 см, маса — близько 35 кг. Робот має 37 ступенів свободи, максимальний крутний момент у суглобах 120 Н.м, вбудовані триперсті спритні руки Dex3-1 із керуванням за зусиллям і виділений обчислювальний модуль розробника NVIDIA Jetson Orin NX потужністю 100 TOPS, що встановлює новий орієнтир для розгортуваних гуманоїдних платформ.
| Кількість ступенів свободи | 37 (конфігурація G1-Comp EDU) |
|---|---|
| Максимальний крутний момент — колінний суглоб | 120 Н.м |
| Обчислювальний модуль ШІ | NVIDIA Jetson Orin NX — 100 TOPS |
| Час роботи від акумулятора | ~2 год (9000 мАг, швидке від'єднання) |
На зображенні нижче показано G1-Comp у природному змагальному середовищі — на футбольному полі стандартних розмірів. Стабільна хода та цілеспрямовані рухи, що їх демонструє робот, цілком виправдовують його визначення як «Football Icon Designed for Competitions».

Тіло, розроблене для змагань: 130 см, 35 кг, готовий до руху
З розмірами 1320 × 450 × 200 мм у вертикальному положенні і можливістю складатися до 690 × 450 × 300 мм для транспортування G1-Comp EDU займає фізичний простір дорослої людини невисокого зросту. Маса приблизно 35 кг разом із акумулятором забезпечує чудове співвідношення потужності до маси завдяки повністю електричному приводу. Без гідравліки, без пневматики — кожен суглоб приводиться у рух фірмовим двигуном із порожнистою віссю власної розробки Unitree, а все проведення кабелів здійснюється всередині порожнистої конструкції суглоба, що повністю виключає зачіпання зовнішніх проводів.
На зображенні нижче показані розміри G1-Comp у вертикальному та складеному положеннях, що полегшують транспортування між майданчиками для змагань і науковими лабораторіями.

37 ступенів свободи: архітектура руху, подібна до людської
Достовірність гуманоїдної мобільності визначається кінематичною архітектурою. G1-Comp EDU має 37 ступенів свободи — базова платформа забезпечує від 25 до 45 налаштовуваних ступенів свободи в ногах, попереку, руках і голові, тоді як спритні руки Dex3-1 у комплекті додають 7 ступенів свободи на руку та 2 додаткових опціональних ступені в зап'ясті на кожну руку. Кожна нога артикулює в 6 ступенях свободи (стегно 3 + коліно 1 + гомілковостоп 2), що надає роботу необхідний діапазон відведення, обертання та згинання стегна для спритної двоногої ходи, бокового переміщення та відновлення після зовнішніх збурень.
Надширокий діапазон рухів у суглобах
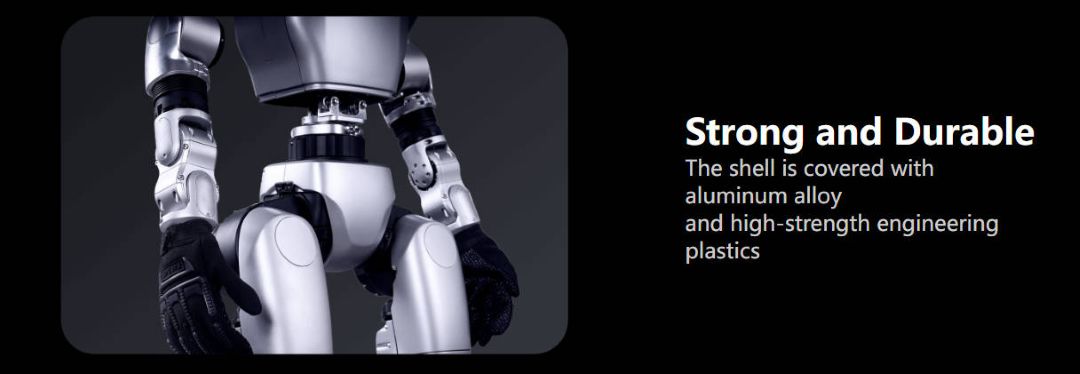
Порівняно з більшістю академічних гуманоїдних платформ G1-Comp пропонує незвично широку кутову огорожу. Попереково-крижовий суглоб обертається в діапазоні Z±155°, X±45°, Y±30°; колінний суглоб згинається від 0° до 165°; нахил стегна охоплює ±154°. Ці діапазони дозволяють присідати, тягнутися і виконувати динамічні перенесення центру мас, які недоступні роботам з обмеженими ступенями свободи. Корпус, видимий на зображенні нижче, виготовлений з алюмінієвого сплаву, підсиленого високоміцними конструкційними пластиками — поєднання, що поглинає ударні навантаження під час змагань без додавання зайвої маси до кінематичного ланцюга.
Система подвійного кодувальника в кожному суглобі
Точність позиціонування під навантаженням — це постійний виклик для гуманоїдів з великою кількістю ступенів свободи. G1-Comp вирішує це за допомогою системи подвійного кодувальника в кожному суглобі: один кодувальник на роторі двигуна, другий — на вихідному валу. Ця надлишкова петля зворотного зв'язку забезпечує точні та стабільні стани суглобів навіть тоді, коли зовнішні перешкоди або механічний люфт знизили б продуктивність системи з одним кодувальником. Результат — надійне перенесення Sim2Real, де поведінка, навчена в Isaac Gym або MuJoCo, передбачувано виконується на фізичному роботі.

Ходові характеристики: двонога хода зі швидкістю 2 м/с
Вбудована система керування рухом G1-Comp забезпечує пікову швидкість пересування 2 м/с — достатньо для участі у стандартних форматах матчів RoboCup Soccer. Система керування рухом, що є галузевим орієнтиром, розроблена спеціально для умов конкурентних матчів і зберігає стабільність ходи під час контактних збурень від м'яча та бокового натиску суперницьких роботів.
Надстабільне керування рівновагою
На практиці керування рівновагою визначає, чи залишається змагальний робот вертикально чи опиняється на газоні. Система керування G1-Comp поглинає несподівані поштовхи та варіації нерівної поверхні, не перериваючи безперервності ходи. На кадрі нижче зображено робота в середині кроку з центром мас, правильно проекованим на полігон опори — характерна ознака добре налаштованого контролера всього тіла.

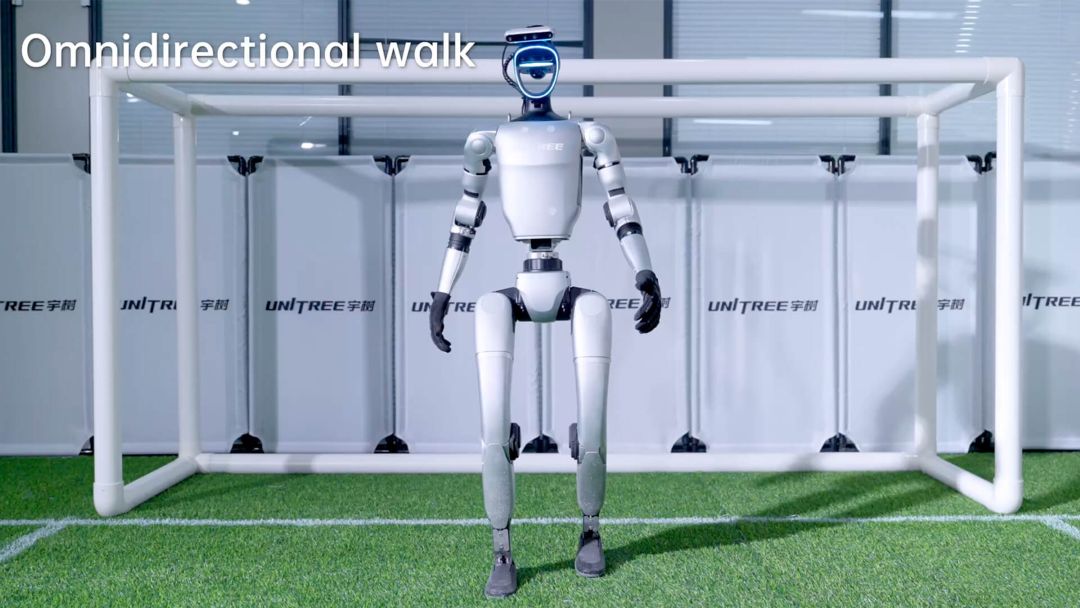
Всенаправлена хода
Окрім прямолінійного пересування, G1-Comp підтримує всенаправлену ходу — бічне переміщення, обертання на місці та зміну напряму без зупинки. Ця можливість є необхідною для переміщення поблизу воріт у футболі та однаково корисна для завдань інспекції або маніпуляцій у дослідницьких середовищах з перешкодами, де агільне управління відбитком стопи є визначальним.
Спритні руки Dex3-1: маніпуляція з керуванням за зусиллям
На відміну від багатьох гуманоїдних роботів для змагань, що постачаються з пасивними захватами, G1-Comp EDU включає пару триперстих спритних рук Dex3-1 як стандартне обладнання. Кожна рука має 7 активних ступенів свободи: великий палець — 3 ступені свободи, вказівний і середній — по 2 ступені свободи. Масив сенсорів сили охоплює діапазон відчуття від 10 г до 2500 г, що дозволяє точно захоплювати як крихкі предмети, так і стандартне змагальне обладнання. Робоча напруга — 12–58 В з живленням безпосередньо від шини живлення робота. Опціональне оновлення з масивом тактильних сенсорів доступне для дослідницьких процесів, що вимагають зворотного зв'язку про контакт на рівні шкіри.
Портрет нижче показує повну систему G1-Comp EDU: зверніть увагу на камеру глибини, змонтовану на шоломі, конфігурацію бімануальних рук та руки Dex3-1 з виглядом рукавичок, що надають платформі виразного гуманоїдного характеру.

NVIDIA Jetson Orin NX: 100 TOPS для ШІ на борту
Виділений обчислювальний модуль розробника — NVIDIA Jetson Orin NX — забезпечує 100 TOPS продуктивності виводу ШІ разом з 8-ядерним процесором Arm Cortex-A78AE з тактовою частотою до 2 ГГц, 16 ГБ уніфікованої пам'яті та 1024 ядрами відеокарти NVIDIA Ampere. Це не тонкий клієнт, що розвантажує обчислення в хмару — весь вивід, сприйняття та рішення з керування виконуються на борту в реальному часі. Операційний обчислювальний вузол, що керує низькорівневим керуванням двигунами, виконує фірмове програмне забезпечення Unitree, недоступне кінцевому користувачу, зберігаючи цілісність системи керування рухом, водночас залишаючи весь Jetson-простір відкритим для власної розробки.
Конфігурація апаратних інтерфейсів
Правобічна панель G1-Comp надає широкий апаратний інтерфейс для вторинної розробки. На зображенні нижче показана повна конфігурація: порти USB Type-C з підтримкою режимів хоста USB 3.0 і USB 3.2 з виходом живлення 5 В / 1,5 А, два порти Gigabit Ethernet RJ45 для потоків даних сенсорів з великою пропускною здатністю, та шини живлення з кількома напругами: 5 В, 12 В, 24 В і 54,8 В. Система камери глибини використовує Intel RealSense D455, що у поєднанні з обертанням голови в 2 ступені свободи забезпечує покриття поля зору 180°. Масив з 4 мікрофонів включає шумопридушення та ехоскасування для надійного сприйняття голосових команд навіть у галасливому змагальному середовищі.

Відкрита екосистема розробки
Окрім обчислювальної потужності, G1-Comp EDU постачається з комплексним програмним стеком розробки. Діаграма нижче ілюструє шість стовпів екосистеми: багаторівневий шар API (верхній рівень, нижній рівень, DDS, аудіо/освітлення); середовища симуляції Isaac Gym і MuJoCo; мультимодальна взаємодія через великомасштабну мовну модель UnifoLM з підтримкою TTS і ASR; сумісність з екосистемою ROS; мобільний додаток для швидкого налаштування; і Jetson Orin NX як обчислювальний модуль розробки. Сумісність з ROS означає, що наявні лабораторні кодові бази, драйвери сенсорів і конвеєри візуалізації переносяться з мінімальними зусиллями.

SDK RoboCup: від симуляції до розгортання на змаганнях
Спеціальний SDK RoboCup скорочує шлях між навчанням стратегій і днем матчу. Три спеціалізовані шари API охоплюють кожен етап конвеєра змагального агента. API візуального розпізнавання надає доступ до вбудованої нейромережі виявлення об'єктів у реальному часі YOLO11, забезпечуючи насичений інтерфейс інформації про стадіон: позиція м'яча, орієнтація воріт, розташування партнерів і суперників. API просторового позиціонування поєднує монокулярне геометричне позиціонування з бінокулярним позиціонуванням за глибиною для точних метричних оцінок позиції на полі. API керування рухом перетворює сигнали рішень верхнього рівня на дійсні команди пересування та маніпуляції.
Навчання підтримується фреймворком навчання з підкріпленням unitree_rl_gym, що інтегрує Isaac Gym і MuJoCo для ефективної фізичної симуляції. Параметри навчання (кількість паралельних середовищ, випадкове зерно, максимальна кількість ітерацій) повністю налаштовуються. Повний конвеєр Sim2Sim → Sim2Real задокументований і підтримується. На зображенні нижче показано G1-Comp, що виконує навчену поведінку підходу до м'яча на тренувальному майданчику у приміщенні.

Технічна порада: Під час перенесення навченої в Isaac Gym стратегії на фізичний G1-Comp увімкніть попередньо налаштовані параметри доменної рандомізації sim-to-real для тертя поверхні (μ = 0,4–1,2) та затримки двигуна (5–20 мс). Ці діапазони параметрів відображають реальну мінливість, спостережену на штучному газоні на змагальних майданчиках. Навчання без доменної рандомізації дає стратегії, що значно деградують уже при першому розгортанні на реальному обладнанні.
Акумулятор 9000 мАг: ~2 години безперервної роботи
G1-Comp працює від 13-ланцюгового літієвого акумулятора ємністю 9000 мАг, що забезпечує приблизно 2 години автономної роботи в типових умовах змішаної активності. Механізм швидкого від'єднання дозволяє замінити акумулятор за секунди, що є критично важливим на турнірах, де час між матчами обмежений. Зарядний пристрій працює при 54 В / 5 А. Інтелектуальні OTA-оновлення програмного забезпечення встановлюються бездротово, підтримуючи актуальність усіх систем без необхідності фізичного підключення до комп'ютера.
На інфографіці нижче показано приблизний час роботи 120 хвилин разом із функціями швидкої заміни та швидкої зарядки, що входять до комплекту G1-Comp.
Технічні характеристики Unitree G1-Comp EDU
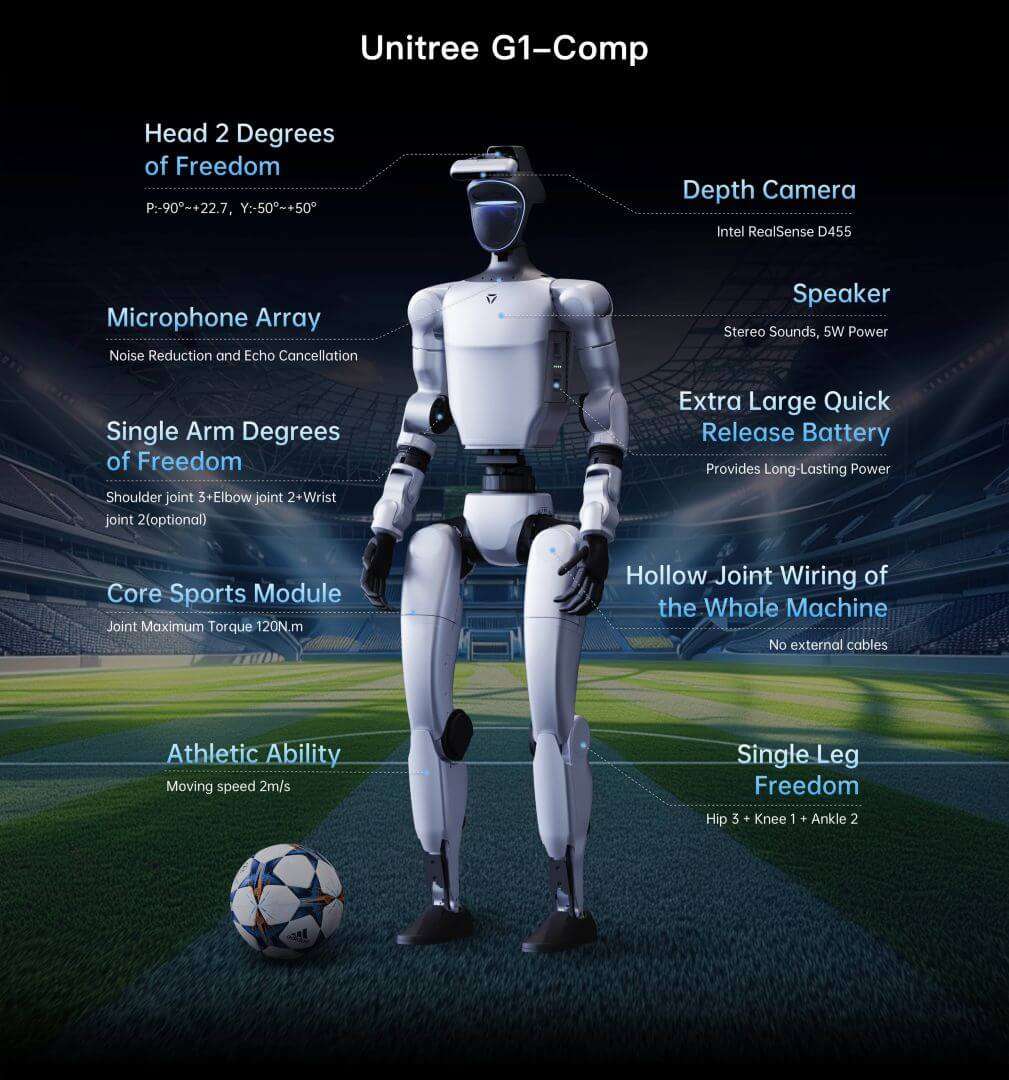
Анотована діаграма нижче надає візуальний довідник ключових апаратних компонентів та їх фізичного розташування на платформі G1-Comp EDU перед повними числовими таблицями характеристик.
Механічні розміри
| Модель | G1 Comp |
|---|---|
| Висота × ширина × товщина (стоячи) | 1320 × 450 × 200 мм |
| Висота × ширина × товщина (складено) | 690 × 450 × 300 мм |
| Маса (з акумулятором) | ~35 кг+ |
| Матеріал корпусу | Алюмінієвий сплав + високоміцні конструкційні пластики |
| Довжина гомілки + стегна | 0,6 м |
| Розмах рук | ~0,45 м |
Ступені свободи
| Загальна кількість ст. св. — конфігурація G1-Comp EDU | 37 |
|---|---|
| Загальна кількість ст. св. — діапазон базової платформи | 25–45 (налаштовується) |
| Ст. св. однієї ноги | 6 (стегно 3 + коліно 1 + гомілковостоп 2) |
| Ст. св. попереку | 1 + опціональні 2 додаткові |
| Ст. св. однієї руки | 5 (плече 3 + лікоть 2) |
| Ст. св. голови | 2 |
| Ст. св. однієї кисті — Dex3-1 (в комплекті) | 7 + опціональні 2 ст. св. зап'ястя (великий 3 + вказівний 2 + середній 2) |
Характеристики суглобів
| Максимальний крутний момент — колінний суглоб | 120 Н.м |
|---|---|
| Максимальне навантаження руки | ~3 кг |
| Максимальна швидкість пересування | 2 м/с |
| Тип кодувальника суглобів | Подвійний кодувальник (ротор + вихідний вал) |
| Внутрішнє проведення кабелів у всіх суглобах | Так — без зовнішніх кабелів |
| Система охолодження | Локальне повітряне охолодження |
Діапазон рухів суглобів
| Діапазон попереково-крижового суглоба | Z±155°, X±45°, Y±30° |
|---|---|
| Діапазон колінного суглоба | 0~165° |
| Діапазон кульшового суглоба | P±154°, R-30~+170°, Y±158° |
| Діапазон зап'ястного суглоба | P±92,5°, Y±92,5° |
| Діапазон суглоба голови | P:-90°~+22,7°, Y:-50°~+50° |
Обчислення та штучний інтелект
| Базова обчислювальна потужність | 8-ядерний високопродуктивний процесор |
|---|---|
| Обчислювальний модуль розробника | NVIDIA Jetson Orin NX |
| Продуктивність ШІ | 100 TOPS |
| Процесор Jetson | Arm Cortex-A78AE, 8 ядер, до 2 ГГц |
| Відеокарта Jetson | 1024 ядра NVIDIA Ampere CUDA |
| Пам'ять Jetson | 16 ГБ уніфікованої пам'яті |
Сенсори та сприйняття
| Камера глибини | Intel RealSense D455 (поле зору 180° при обертанні голови) |
|---|---|
| 3D LiDAR | Так — горизонтальне поле зору 360°, вертикальне 59° |
| Масив мікрофонів | 4-мікрофонний масив з шумопридушенням та ехоскасуванням |
| Динамік | 5 Вт стерео |
Підключення та інтерфейси
| WiFi | WiFi 6 |
|---|---|
| Bluetooth | Bluetooth 5.2 |
| Дротова мережа | Gigabit Ethernet ×2 (RJ45) |
| USB-інтерфейси | USB 3.0 Type-C ×3, USB 3.2 / DP1.4 Type-C ×1 |
| Шини живлення (доступні для розробки) | 5 В, 12 В, 24 В, 54,8 В |
Живлення та акумулятор
| Джерело живлення | 13-ланцюговий літієвий акумулятор |
|---|---|
| Ємність розумного акумулятора | 9000 мАг (швидке від'єднання) |
| Зарядний пристрій | 54 В / 5 А |
| Час роботи акумулятора | ~2 год |
Триперста спритна рука Dex3-1
| Загальна кількість ст. св. на руку | 7 активних (великий 3 + вказівний 2 + середній 2) |
|---|---|
| Діапазон відчуття зусилля | 10–2500 г |
| Робоча напруга | 12–58 В |
| Кути суглобів великого пальця | 0°~+100°, -35°~+60°, -60°~+60° |




")
")









