



- Наявність: У наявності
- Код товару: 00-00013722
- Вага брутто: 35.00kg
Unitree G1 Edu Advanced-U2 — це гуманоїдний робот дослідницького класу з 29 ступенями свободи, розроблений для університетів, лабораторій НДДКР і команд розробників робототехніки. Вбудований обчислювальний модуль NVIDIA Jetson Orin потужністю 100 TOPS у поєднанні з системою сприйняття 360°, що складається з 3D LiDAR і камери глибини, утворюють фізичну платформу для досліджень у галузі матеріалізованого штучного інтелекту, навчання з підкріпленням і складних алгоритмів локомоції.
| Загальна кількість ступенів свободи | 29 DOF |
|---|---|
| Обчислювальний модуль | NVIDIA Jetson Orin 100 TOPS |
| Максимальний момент (коліно) | 120 Н·м |
| Автономна робота | ~2 год (акумулятор 9000 мА·год) |
На зображенні нижче показаний Unitree G1 Edu Advanced-U2 у робочій позиції стоячи: силует висотою 1320 мм з чітко видимими сегментами шарнірних кінцівок демонструє реальні габарити та пропорції кожної частини тіла.
Технічні можливості Unitree G1 Edu Advanced-U2
Адаптивне навчання на базі UnifoLM
Основою інтелекту G1 Edu Advanced-U2 є Єдина велика модель Unitree (UnifoLM) — фундаментальна модель, що дозволяє роботу набувати нових поведінкових шаблонів двома взаємодоповнювальними шляхами. Навчання з підкріпленням дозволяє агенту вдосконалювати свою стратегію через взаємодію з реальним середовищем, а навчання методом наслідування дає змогу відтворювати послідовності, які демонструє людина-оператор. Результат: кожна лабораторна сесія генерує навчальні дані для наступної, скорочуючи цикл ітерацій з днів до годин.
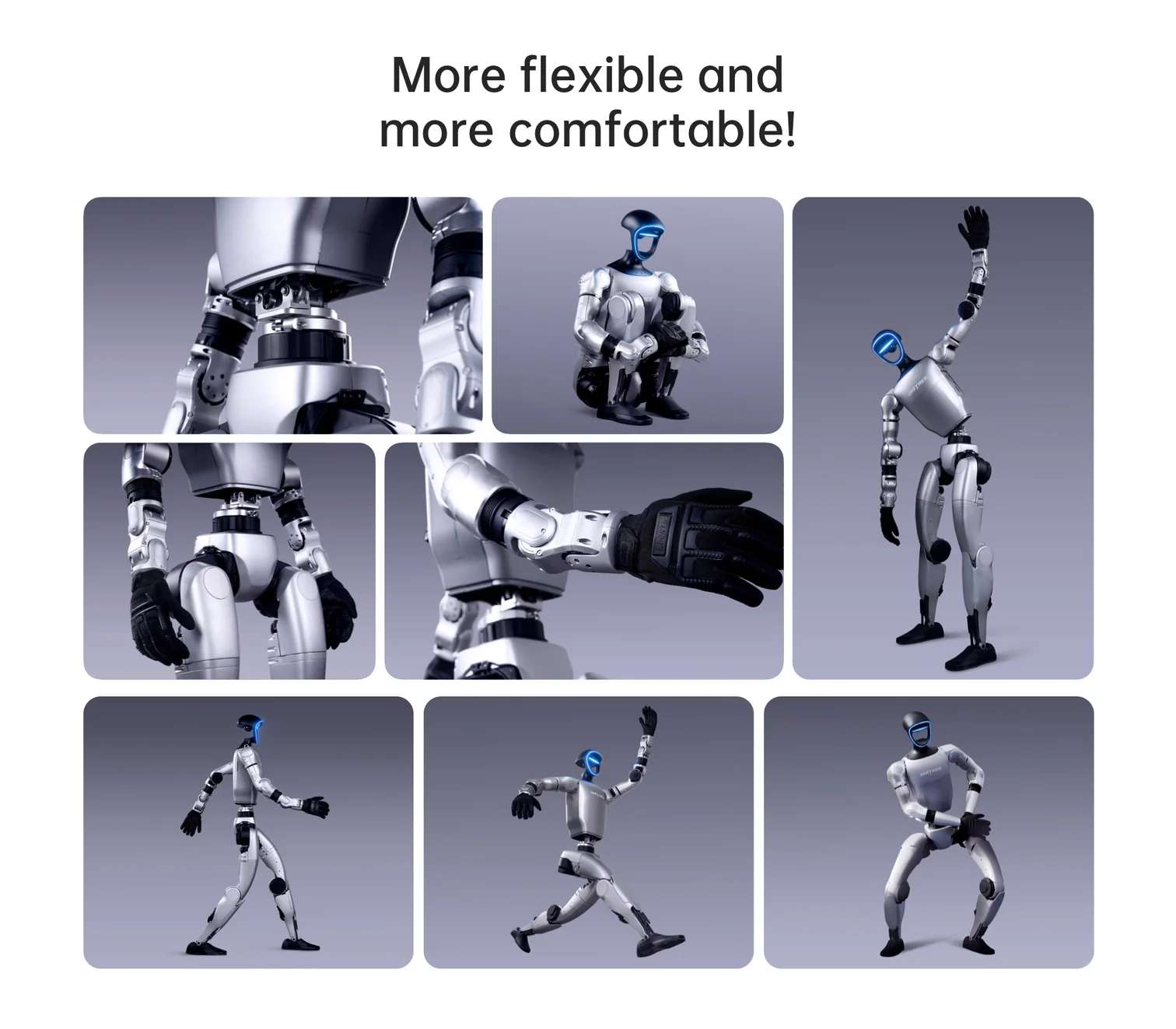
Рухливість з 29 ступенями свободи та алгоритм відновлення після падінь
Механічна архітектура забезпечує 12 ступенів свободи в ногах (6 на кінцівку), 14 ступенів свободи в руках (7 на руку) та 3 ступені свободи в поясі (нахил, крен, рискання) — точно відтворюючи діапазон рухів суглобів людини. Надширокі кути — коліно від 0° до 165°, кульшовий суглоб за нахилом ±154° — дозволяють роботу підніматися з положення лежачи, присідати для підбирання предметів і складатися до компактних транспортних габаритів 690 × 450 × 300 мм без розбирання.
- вбудовані алгоритми відновлення після падінь для стабільної роботи на нерівних поверхнях
- гібридне керування силою та позицією для тактильної чутливості, подібної до людської
- максимальне корисне навантаження на руку ~3 кг для маніпуляційних експериментів
- складений формат дозволяє транспортування між лабораторіями без спеціального підйомного обладнання
Наступне зображення фіксує робота під час демонстрації просунутих рухових можливостей, з акцентом на діапазон руху суглобів та динамічну рівновагу.
Точне приведення в дію: двигуни PMSM з низькою інерцією
Кожен суглоб приводиться швидкохідним двигуном PMSM з внутрішнім ротором і низькою інерцією, встановленим на промислових хрестових роликопідшипниках. Хрестові роликопідшипники одночасно сприймають радіальні та осьові навантаження, що усуває люфт, характерний для однорядних вузлів, і забезпечує стабільну жорсткість суглоба по всьому діапазону руху. У поєднанні з гібридним керуванням силою і позицією ця апаратна конфігурація надає роботу точність крутного моменту, необхідну для делікатних маніпуляцій та безпечної фізичної взаємодії з людиною (pHRI).
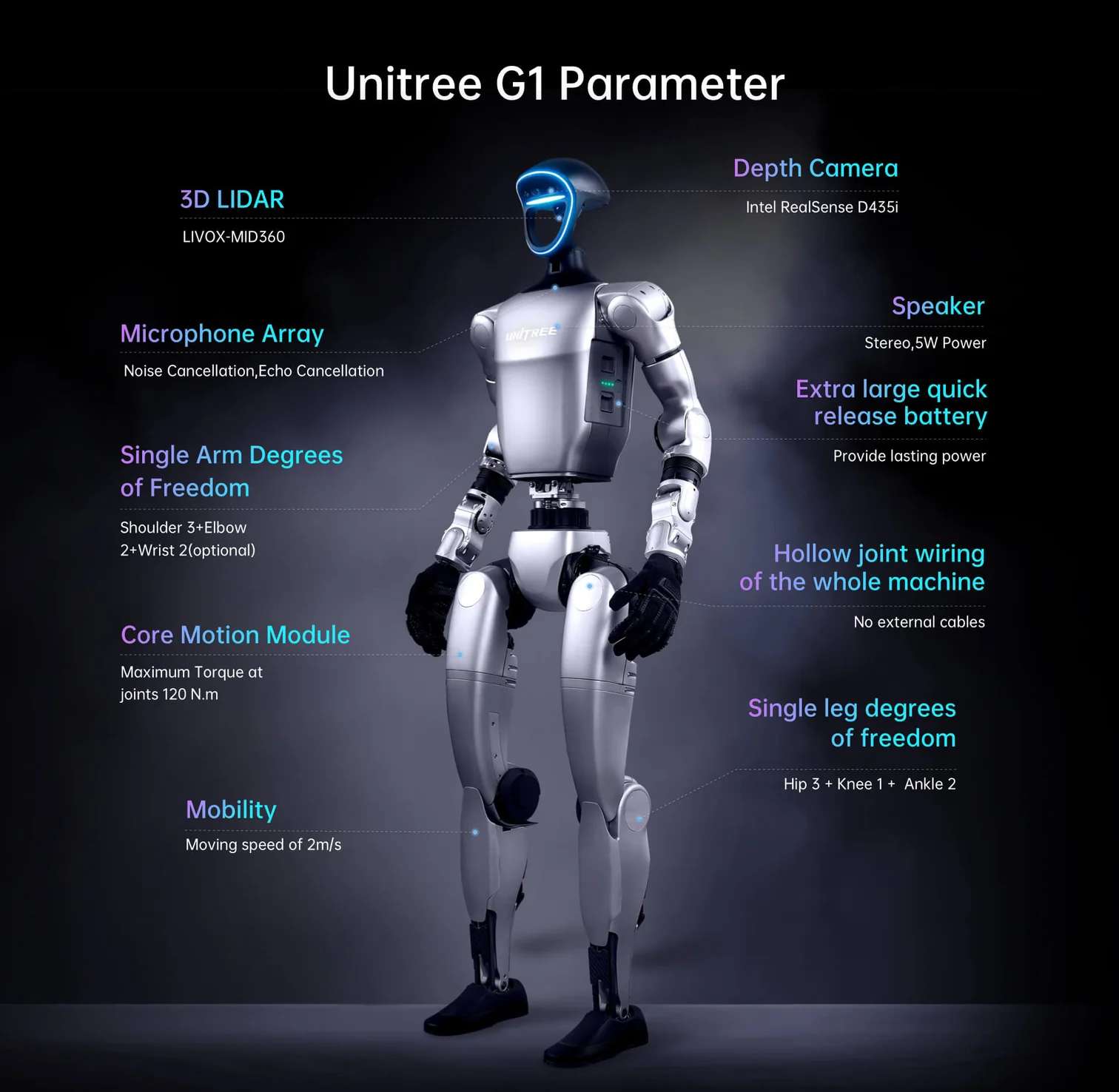
Сприйняття на 360° та бортові обчислення штучного інтелекту
Голова робота інтегрує 3D LiDAR і камеру глибини для побудови щільної карти навколишнього середовища в реальному часі, що уможливлює безпечне уникнення перешкод і планування локомоції з урахуванням середовища. Обробку цих потоків даних виконує бортовий NVIDIA Jetson Orin із продуктивністю 100 TOPS для вивідних обчислень — достатньо для одночасного виконання виявлення об'єктів, оцінки пози тіла та алгоритмів локальної навігації без вивантаження на зовнішній сервер. Масив із 4 мікрофонів і динамік потужністю 5 Вт забезпечують рівень взаємодії, тоді як WiFi 6 і Bluetooth 5.2 підтримують малозатримкний зв'язок із наглядовими системами.
Технічна порада: При розробці політик локомоції методом навчання з підкріпленням починайте з конвеєра перенесення з симуляції в реальність (sim-to-real), використовуючи офіційну URDF-модель Unitree в Isaac Sim або MuJoCo. Конструкція з порожнистим електричним кабелюванням у всіх суглобах дозволяє прокладати додаткові кабелі датчиків — наприклад, шестиосьових датчиків сили-моменту в зап'ясті — крізь сегменти рук без зміни зовнішньої структури, зберігаючи колізійну геометрію робота ідентичною між симуляцією і реальністю.
Технічні характеристики Unitree G1 Edu Advanced-U2
Зображення нижче надає детальний вигляд збоку, що дозволяє перевірити реальні габарити та розташування сенсорних і обчислювальних модулів.

Механічні характеристики
| Габарити (стоячи) | 1320 × 450 × 200 мм |
|---|---|
| Габарити (складено) | 690 × 450 × 300 мм |
| Маса | ~35 кг |
| Загальна кількість ступенів свободи | 29 DOF |
| Ступені свободи ніг | 12 (6 на ногу) |
| Ступені свободи пояса | 3 (нахил / крен / рискання) |
| Ступені свободи рук | 14 (7 на руку) |
| Маніпуляційні кисті | Не входять до комплекту |
Характеристики суглобів
| Максимальний момент (коліно) | 120 Н·м |
|---|---|
| Максимальне корисне навантаження на руку | ~3 кг |
| Тип підшипника суглоба | Промислові хрестові роликопідшипники |
| Тип двигуна суглоба | Швидкохідний PMSM з внутрішнім ротором і низькою інерцією |
Діапазон руху суглобів
| Пояс — рискання (Z) | ±155° |
|---|---|
| Пояс — крен (X) | ±45° |
| Пояс — нахил (Y) | ±30° |
| Коліно | 0° ~ 165° |
| Кульшовий суглоб — нахил (P) | ±154° |
| Кульшовий суглоб — крен (R) | -30° ~ +170° |
| Кульшовий суглоб — рискання (Y) | ±158° |
| Зап'ястя — нахил (P) | ±92,5° |
| Зап'ястя — рискання (Y) | ±92,5° |
Обчислення та електроніка
| Базові обчислення | 8-ядерний високопродуктивний процесор |
|---|---|
| Модуль розширених обчислень | NVIDIA Jetson Orin 100 TOPS (у комплекті) |
| Сенсори сприйняття | Камера глибини + 3D LiDAR |
| Аудіо | Масив із 4 мікрофонів, динамік 5 Вт |
| Підключення | WiFi 6, Bluetooth 5.2 |
Живлення
| Акумулятор | Інтелектуальний акумулятор 9000 мА·год (швидке знімання) |
|---|---|
| Розрахунковий час роботи | ~2 год |
| Зарядний пристрій | 54 В / 5 А |
Додаткові характеристики
| Гарантія | 12 місяців |
|---|---|
| Вторинна розробка | Підтримується |
| Система охолодження | Місцеве повітряне охолодження |
| Внутрішнє кабелювання | Порожнисте електричне кабелювання у всіх суглобах |
Комплектація
- Гуманоїдний робот Unitree G1 Edu Advanced-U2
- Модуль NVIDIA Jetson Orin 100 TOPS (попередньо встановлений)
- Інтелектуальний акумулятор 9000 мА·год із механізмом швидкого знімання
- Зарядний пристрій 54 В / 5 А
- Ручний пульт дистанційного керування
- Захисна підставка
Які мови програмування та фреймворки підтримує Unitree G1 Edu Advanced-U2?
Робот підтримує вторинну розробку через відкритий SDK Unitree, сумісний із ROS2 та популярними фреймворками глибокого навчання. Модуль NVIDIA Jetson Orin дозволяє запускати моделі на базі PyTorch або TensorFlow безпосередньо на апаратному забезпеченні робота без потреби у зовнішньому обчислювальному сервері.
Як розподілені 29 ступенів свободи у Unitree G1 Edu Advanced-U2?
29 ступенів свободи розподілені так: 12 у ногах (6 на ногу), 14 у руках (7 на руку) і 3 у поясі. Маніпуляційні кисті в цій конфігурації не входять до комплекту; кінці рук розраховані на встановлення інструментів або захоплювачів відповідно до вимог конкретного проєкту.
Чим відрізняється версія Advanced-U2 від стандартного G1 Edu?
Версія Advanced-U2 включає модуль розширених обчислень NVIDIA Jetson Orin 100 TOPS як штатний компонент. Базові конфігурації G1 Edu постачаються лише з вбудованим 8-ядерним процесором. Саме наявність модуля Jetson Orin уможливлює бортові вивідні обчислення штучного інтелекту без мережевої затримки, що робить Advanced-U2 оптимальним вибором для досліджень у галузі сприйняття та навчання в реальному часі.
Чому обрати EXPERT3D?
З 2012 року EXPERT3D підтримує університети, дослідницькі центри та технологічні компанії в Іспанії та Європі у виборі й інтеграції високотехнологічного обладнання. Наша технічна команда оцінює кожен проєкт перед придбанням і надає кваліфіковану підтримку впродовж усього терміну експлуатації обладнання — від початкового введення в дію до інтеграції в дослідницький робочий процес — із офіційною гарантією 12 місяців і розрахунками в євро.




")
")









