")
- Наявність: У наявності
- Код товару: 10040-000071
- Вага брутто: 95.00kg
PUDU BellaBot — це автономний робот-доставник для приміщень, розроблений для ресторанів, готелів і комерційних закладів обслуговування. Він поєднує інтегроване лазерне та візуальне SLAM-позиціонування з дизайном у котячому стилі, який отримав відзнаку Good Design Award 2022. Чотири розумні підноси витримують по 10 кг кожен, акумулятор ємністю 25,6 А·год із можливістю гарячої заміни забезпечує від 12 до 24 годин безперервної роботи, а потрійна система камер глибини RGBD виявляє перешкоди зі швидкістю до 5400 разів на хвилину — і все це у шасі вагою 55 кг і висотою 1290 мм, виготовленому з авіаційного алюмінієвого сплаву.
| Час автономної роботи | 12–24 год (батарея на 25,6 А·год із гарячою заміною) |
|---|---|
| Вантажопідйомність підноса | 10 кг/ярус × 4 підноси |
| Навігаційна система | Інтегроване лазерне та візуальне SLAM-позиціонування |
| Частота виявлення перешкод | До 5400 разів/хв |
На зображенні нижче показаний BellaBot у своїй відзначеній нагородами формі з котячим стилем, що відображається у дзеркалі, щоб підкреслити чотири рівні підносів, анімований РК-дисплей та характерний модуль голови з котячими вушками, завдяки якому робот отримав відзнаку Good Design Award 2022.

Good Design Award 2022: технології гостинності, які запам'ятовуються гостям
Дизайн сервісного робота — це не просто косметика, він визначає, чи будуть гості взаємодіяти з машиною, чи триматимуться від неї подалі. BellaBot був створений саме з урахуванням цього розуміння. Силует, натхненний котами, анімований 10,1-дюймовий РК-дисплей, який відтворює десятки оригінальних виразів обличчя, і світлодіодні стрічки з м'яким світінням, що проходять уздовж країв кожного підноса, поєднуються у візуальну ідентичність, яка виглядає привітною в обідньому залі, а не індустріальною. Корпус відлитий з ABS-пластику та посилений шасі з авіаційного алюмінієвого сплаву, що дозволяє зберегти загальну вагу на рівні 55 кг, водночас забезпечуючи конструктивну жорсткість, необхідну для багатозмінного комерційного використання з розрахунковим терміном служби 5 років.
Вбудовано шість різних режимів роботи: Delivery (Доставка), Cruise (Круїз), Direct Delivery (Пряма доставка), Birthday (День народження), Special (Спеціальний) та Guiding (Супровід). Потреби ресторану змінюються протягом дня — обслуговування столиків під час обіду, рекламне патрулювання у щасливі години, супровід гостей під час вечері. Один робот адаптується до будь-якого сценарію без перепрограмування, достатньо лише вибрати відповідний режим на вбудованому сенсорному екрані з ОС Android.
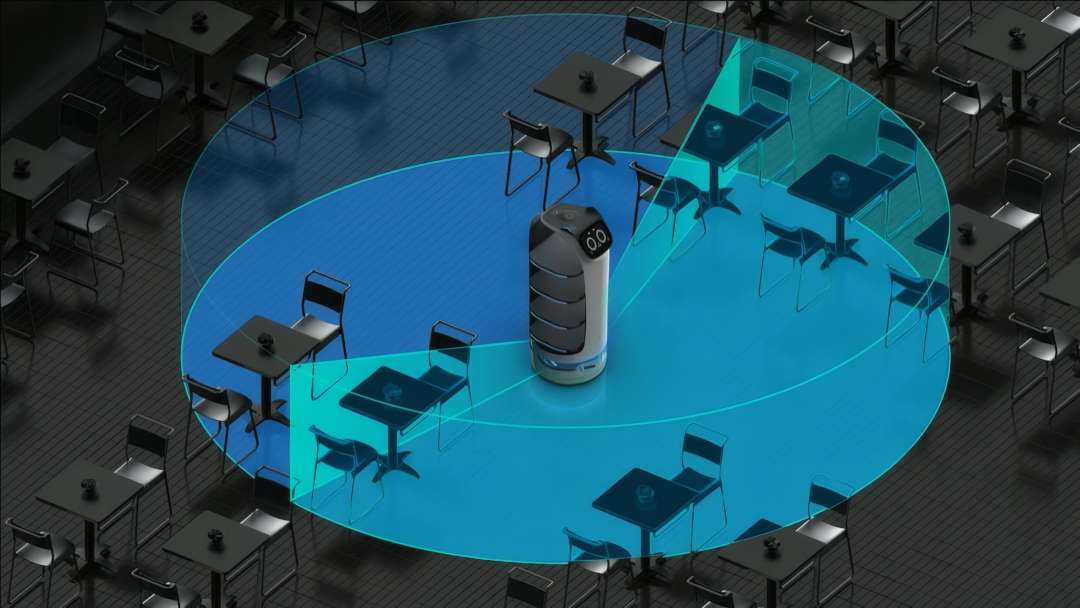
Подвійна SLAM-навігація: робот, який ніколи не губиться
Надійність навігації відрізняє корисне впровадження від дорогого експерименту. BellaBot використовує інтегроване лазерне та візуальне SLAM-позиціонування — два незалежні методи локалізації, що працюють одночасно. Компонент LiDAR генерує екологічну карту на 360° з точністю до сантиметра; візуальний компонент прив'язує робота до маркерів доповненої реальності (AR), встановлених на стелі, для абсолютної корекції положення. На практиці це означає, що BellaBot підтримує точне позиціонування навіть тоді, коли меблі переставляються, часткові перешкоди блокують лінію видимості маркерів або змінюється навколишнє освітлення між періодами обслуговування. На зображенні нижче проілюстровано радіус 360-градусного сканування LiDAR BellaBot під час його навігації у повністю заповненому залі ресторану.
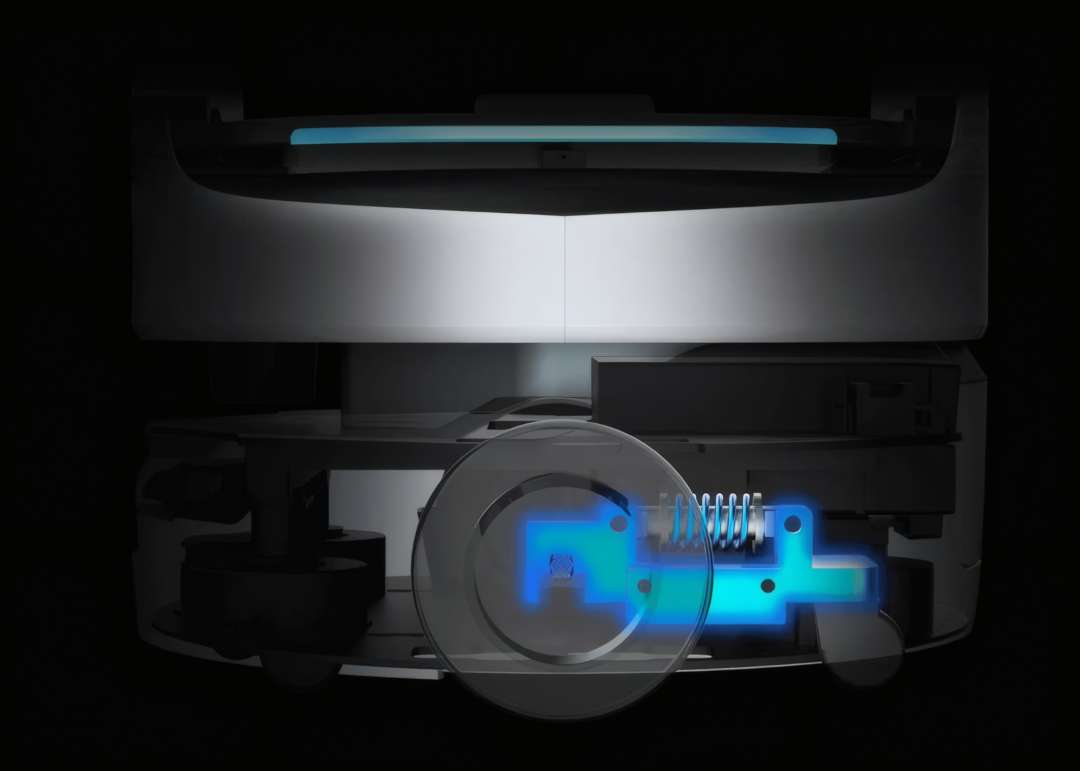
Вдосконалена підвіска: плавний рух реальними поверхнями
Підлога в ресторанах і готелях рідко буває ідеально рівною. Переходи між плиткою та килимом, деформаційні шви та нерівності створюють мікроперешкоди, які дестабілізують роботів із жорстким шасі, спричиняючи коливання підносів і розливання страв. У шасі BellaBot інтегровано спеціальну пружинно-амортизаційну підвіску у вузлі ведучого колеса, яка безперервно поглинає вертикальне зміщення до 10 мм. Страви залишаються на рівні; наповнені рідиною келихи не перевертаються. На поперечному перерізі нижче показана геометрія пружини та амортизатора, вбудованих у приводний модуль.
Трирівневе виявлення перешкод для переповненого залу
Потрійна система RGBD-камер: час відгуку 0,5 секунди
Найнебезпечніші перешкоди в ресторані — це не меблі, а рухливі ноги людей, діти нижче рівня датчиків і предмети, несподівано залишені на підлозі. BellaBot протидіє цьому за допомогою трьох спрямованих вперед камер глибини RGBD у нижньому кільці шасі, забезпечуючи те, що компанія PUDU називає найсильнішим 3D-сприйняттям у своєму класі. Робот може точно виявити перешкоду та ініціювати повну зупинку з часом відгуку всього 0,5 секунди. На зображенні нижче показані три отвори RGBD, встановлені у синьому акцентному кільці біля основи модуля голови.

Частота виявлення: до 5400 сканувань на хвилину
Частота виявлення визначає, наскільки швидко робот реагує на динамічні перешкоди — гостя, який відсуває стілець, або офіціанта, що перетинає його шлях. Блок датчиків BellaBot досягає частоти оновлення до 5400 разів на хвилину, виконуючи нове сканування навколишнього середовища приблизно кожні 11 мілісекунд. На інфографіці нижче показано цей показник поруч із спрямованим конусом сканування, спроєктованим перед роботом.

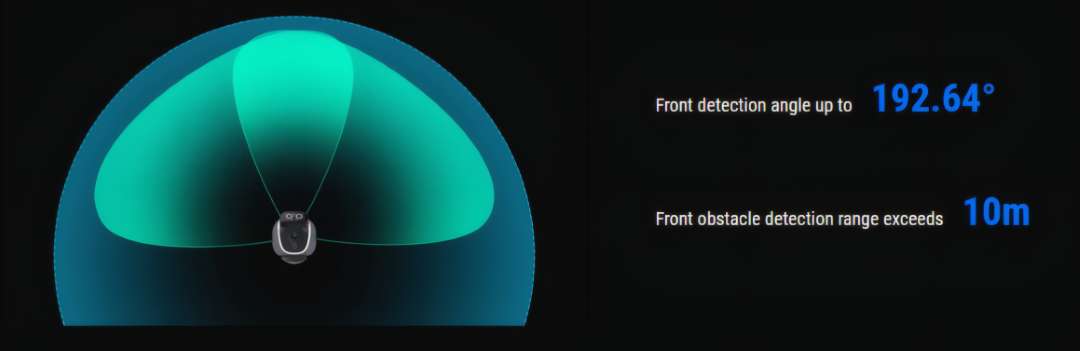
Кут та дальність виявлення: 192,64° на відстані понад 10 метрів
Геометрія покриття так само важлива, як і частота оновлення. Передня дуга виявлення BellaBot охоплює 192,64° — ширше, ніж власні габарити робота — з дальністю виявлення понад 10 м. Це означає, що BellaBot починає планувати траєкторію ухилення задовго до того, як перешкода увійде в зону мінімального гальмівного шляху, що забезпечує плавне коригування маршруту, характерне для професійно налаштованих сервісних роботів. На діаграмі нижче проілюстровано повну півсферу охоплення датчиків.
Мультимодальна взаємодія людини та робота
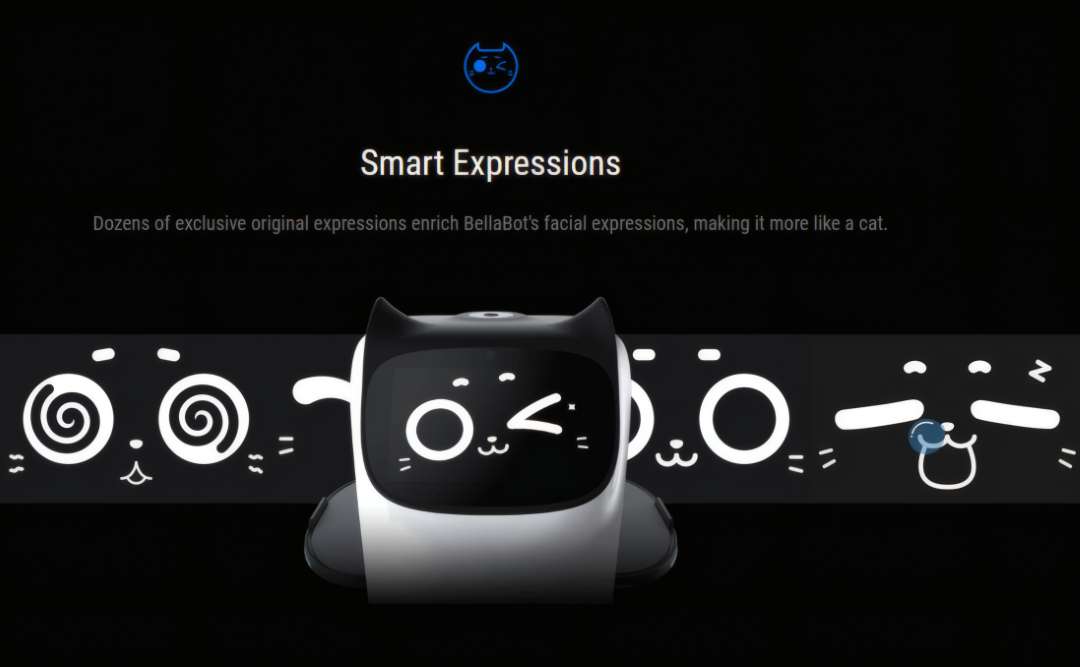
Розумні вирази обличчя: десятки оригінальних анімацій
Гості по-різному реагують на робота, який виглядає так, ніби має індивідуальність. 10,1-дюймовий РК-дисплей BellaBot містить бібліотеку десятків ексклюзивних оригінальних виразів обличчя — пильність, радість, цікавість, сонливість та кілька ступенів роздратування — які активуються в залежності від контексту на основі робочого стану, сенсорного вводу та виконання завдань. Смуга виразів нижче демонструє широту бібліотеки анімацій: від широко розплющених очей до задоволеного підморгування кота.
Тактильний зворотний зв'язок: дотик, який відчуває робот
Кожне вухо та верхня поверхня голови BellaBot оснащені сенсором тактильного зворотного зв'язку. Одне погладжування викликає дружню реакцію; повторні дотики призводять до дедалі більш ентузіастичних реакцій; занадто багато швидких дотиків викликають легкий вираз незадоволення. Цей цикл створює пам'ятний момент для гостей — особливо для сімей з дітьми — перетворюючи кожну доставку на коротку позитивну взаємодію для закладу. На зображенні нижче показано розташування тактильних датчиків з активними зонами світіння на модулі голови.

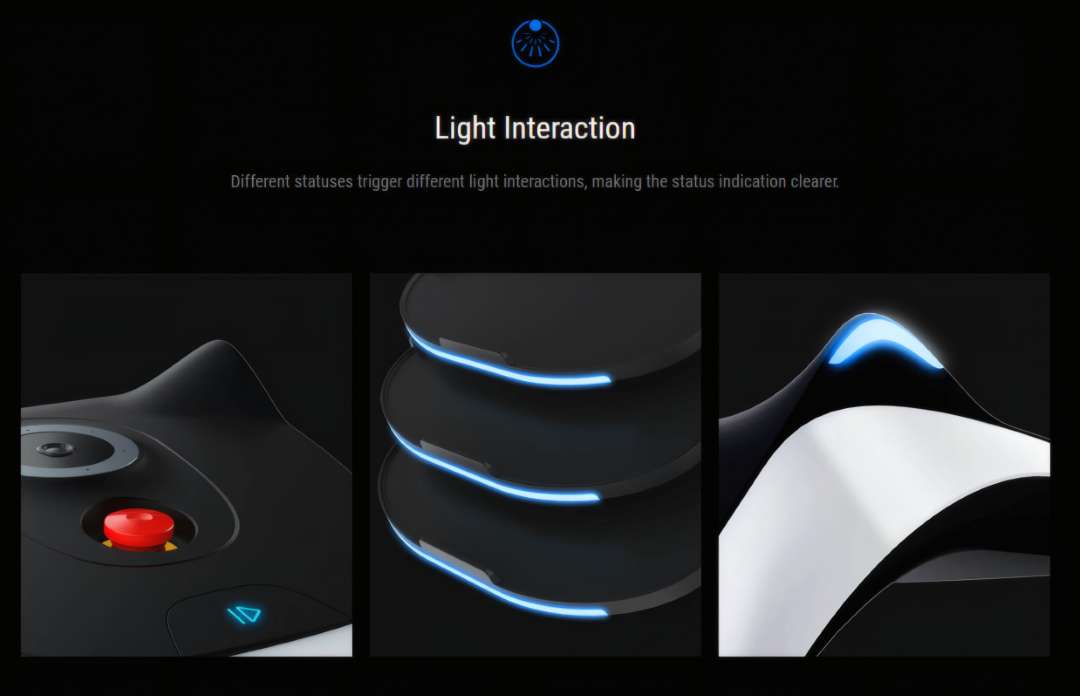
Світлова взаємодія: статус, що передається без слів
Світлодіодні стрічки другого покоління BellaBot проходять уздовж країв кожного підноса та базового кільця, циклічно змінюючи різні патерни для сигналізації про робочий статус — піднос готовий, завдання активне, заряджання або помилка — не вимагаючи від персоналу чи гостей читати інформацію на екрані. Світлодіоди на рівні підноса точно вказують, з якого саме підноса гість повинен забрати страву, усуваючи плутанину під час доставки до кількох пунктів призначення. На трипанельному зображенні нижче зафіксовано аварійний модуль, підсвічування країв підносів та контур котячих вушок у різних станах.
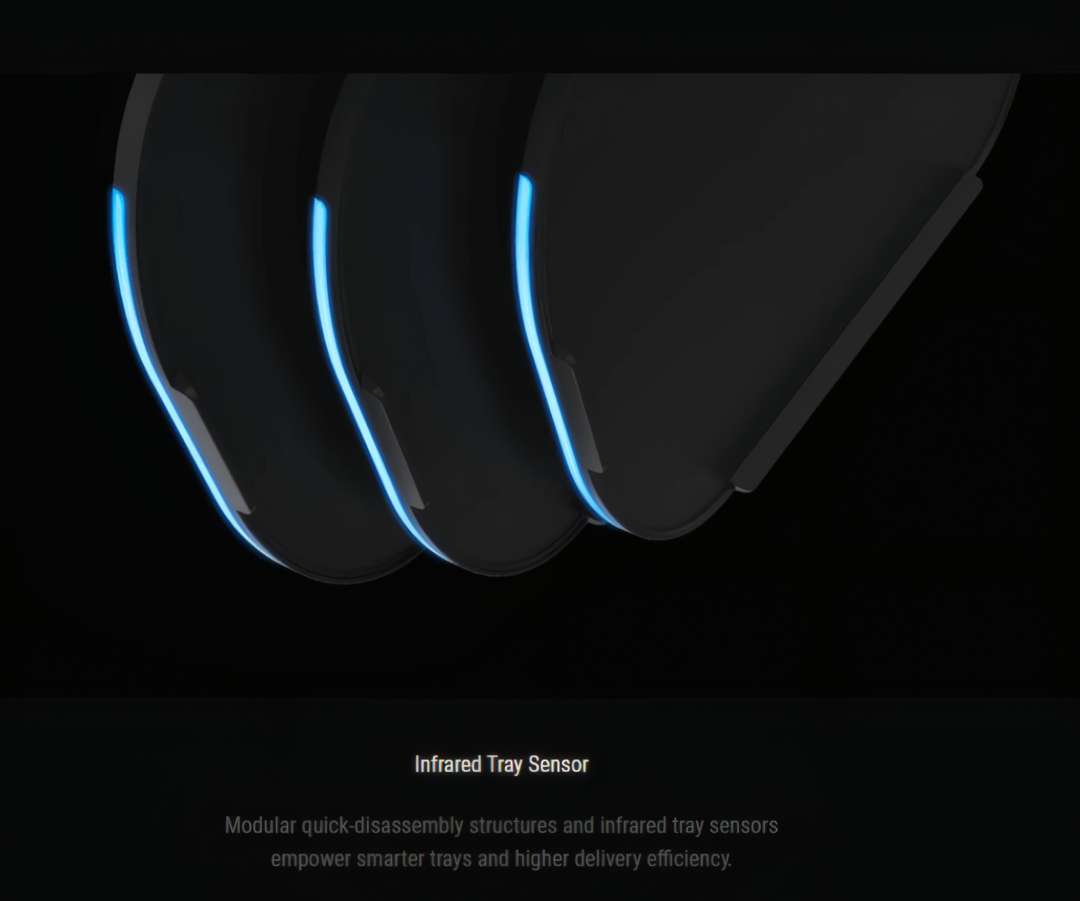
Інтелектуальні підноси з інфрачервоними датчиками
Кожен із чотирьох підносів BellaBot має інфрачервоний датчик присутності, який визначає, завантажений піднос чи порожній. Коли піднос звільняється, датчик подає сигнал роботу — якщо увімкнено перемикач сенсора підноса, BellaBot автоматично завершує поточне завдання біля столика та переходить до наступного доручення через 5 секунд після зняття останньої страви, не вимагаючи участі персоналу. Модульна швидкознімна конструкція означає, що заміна підноса на місці займає лічені секунди. Кожен піднос має розміри 410 мм × 510 мм і витримує до 10 кг. На зображенні нижче показані інфрачервоні сенсорні дуги, що світяться, вбудовані в обід підноса.
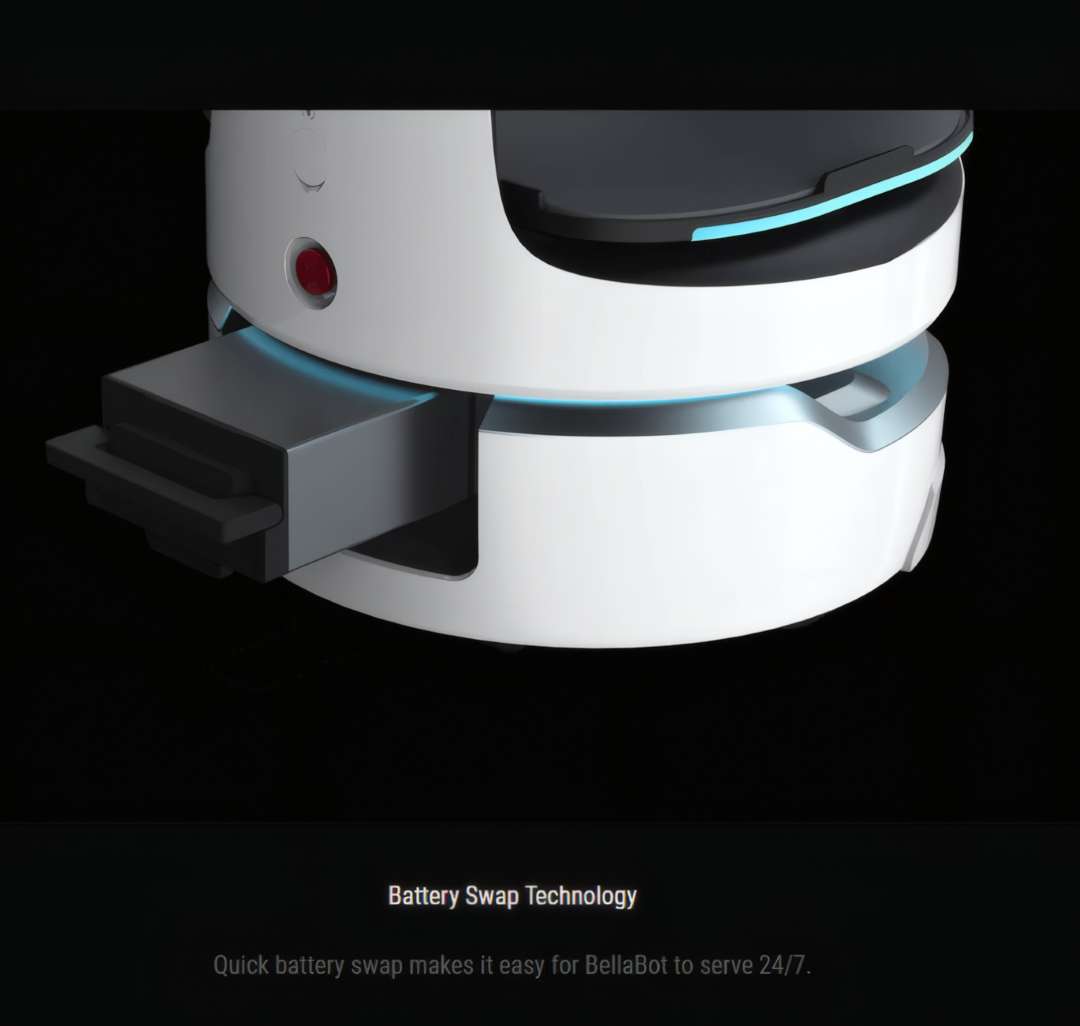
Змінний акумулятор: від 12 до 24 годин безперебійної роботи
Традиційні сервісні роботи потребують 4–5 годинної перерви на заряджання за зміну. BellaBot усуває це обмеження завдяки акумулятору з можливістю гарячої заміни. Літієва батарея на 25,6 А·год витягується з базового блоку за лічені секунди, дозволяючи вставити попередньо заряджений замінник і негайно відновити роботу. За типових умов змішаної активності час автономної роботи становить від 12 до 24 годин, охоплюючи як денні, так і вечірні зміни. Перезаряджання розрядженого акумулятора займає 4,5 години при струмі 29,4 В / 8 А. На зображенні нижче показано механізм вилучення з частково висунутим акумуляторним блоком.
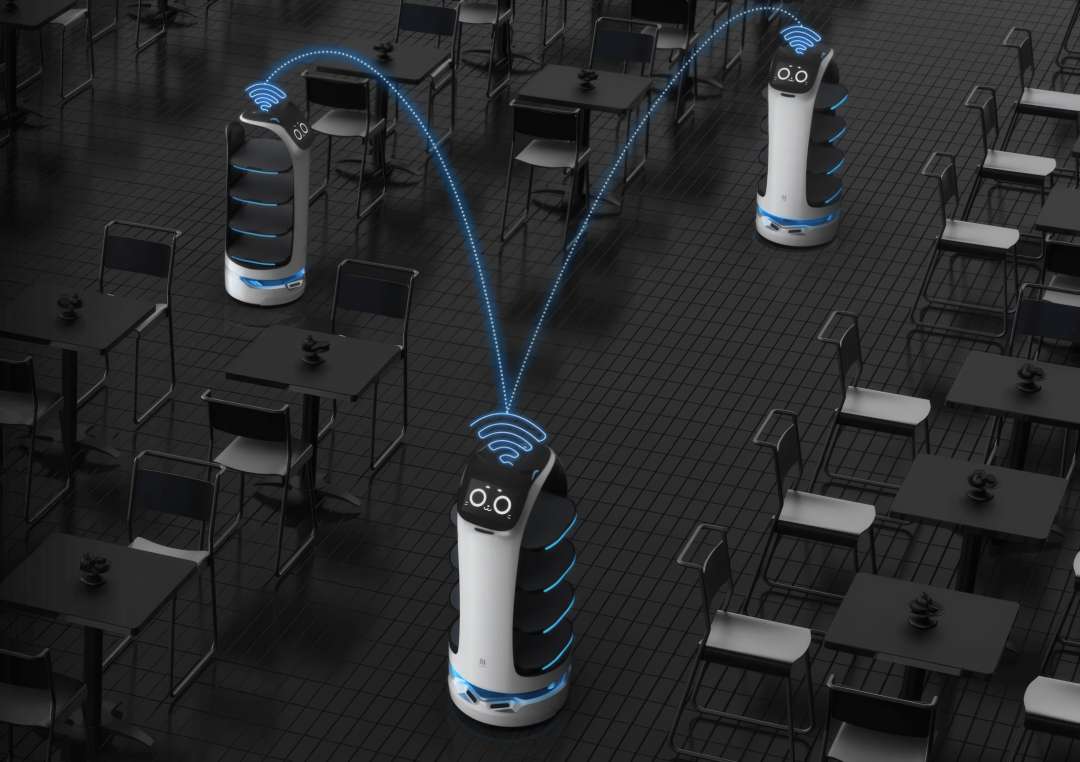
Інтелектуальне управління парком роботів
Один BellaBot трансформує обідній зал. А скоординований парк трансформує всю операційну діяльність. Кілька пристроїв обмінюються даними про позиціонування та завдання через Wi-Fi, забезпечуючи інтелектуальне управління док-станціями: кожен робот автоматично обирає найближчу доступну станцію забору страв, а якщо всі станції зайняті під час напливу відвідувачів, пристрої очікують на тимчасових позиціях і рухаються до станції, як тільки та звільняється — запобігаючи скупченню біля кухонної видачі під час пікових навантажень. На діаграмі нижче показано, як три пристрої BellaBot обмінюються сигналами координації у залі ресторану.
Технічні характеристики PUDU BellaBot
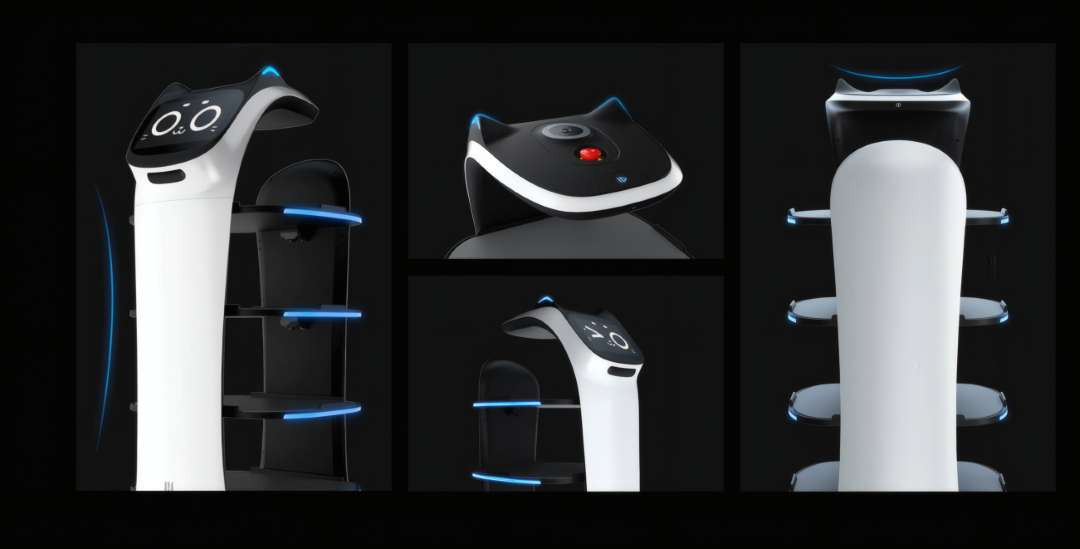
Багатокутовий колаж дизайну нижче є візуальним довідником щодо компонування апаратного забезпечення BellaBot — профіль спереду, вигляд голови зверху, вигляд ззаду на три чверті та повний силует з підносами — перед таблицями повних специфікацій.
Механічні розміри
| Розміри робота (Д × Ш × В) | 565 мм × 537 мм × 1290 мм |
|---|---|
| Вага робота | 55 кг |
| Матеріал корпусу | ABS-пластик + авіаційний алюмінієвий сплав |
| Ступінь захисту IP | IP20 |
| Термін служби | 5 років |
Живлення та акумулятор
| Робоча напруга | DC 23–29,4 В |
|---|---|
| Вхідна потужність | AC 100–240 В, 50/60 Гц |
| Вихідна потужність (зарядний пристрій) | 29,4 В, 8 А |
| Ємність акумулятора | 25,6 А·год (з гарячою заміною) |
| Час заряджання | 4,5 год |
| Час автономної роботи | 12–24 год |
Навігація та мобільність
| Навігаційна система | Інтегроване лазерне та візуальне SLAM-позиціонування |
|---|---|
| Швидкість руху | 0,2–1,2 м/с (регулюється) |
| Мінімальна ширина проходу | 70 см |
| Мінімальна ширина розвороту | 65 см |
| Максимальна висота подолання перешкод | 10 мм |
| Максимальний кут підйому | 5° |
| Вимоги до поверхні | Рівна та гладка підлога у приміщенні |
Підноси та вантажопідйомність
| Кількість підносів | 4 |
|---|---|
| Розміри підноса | 410 мм × 510 мм |
| Вантажопідйомність підноса | 10 кг/ярус |
| Відстань між підносами (зверху вниз) | 230 мм / 200 мм / 200 мм / 180 мм |
| Датчики підноса | Інфрачервоні датчики присутності (модульна швидкознімна конструкція) |
Датчики та сприйняття
| LiDAR | Горизонтальне сканування на 360° (нове покоління) |
|---|---|
| Камери глибини зору | 3 × RGBD (датчики глибини якості Intel) |
| Передній кут виявлення | До 192,64° |
| Дальність виявлення перешкод спереду | > 10 м |
| Частота виявлення перешкод | До 5400 разів/хв |
| Час відгуку RGBD | 0,5 с |
| Візуальний датчик (позиціонування) | Так — камера Marker, встановлена зверху |
Дисплей та аудіо
| Розмір екрана | 10,1-дюймовий РК-дисплей |
|---|---|
| Операційна система | Android |
| Мікрофон | Круговий масив із 6 мікрофонів |
| Динаміки | 2 × 10 Вт, стерео |
| Вирази обличчя | Десятки оригінальних анімованих виразів |
| Тактильний зворотний зв'язок | Так — сенсорні датчики на голові та вухах |
| Світлодіодна взаємодія | Так — інтерактивні світлодіодні стрічки другого покоління |
| Голосове пробудження | Голосове слово активації "Bella, Bella" |
Режими роботи
| Режим доставки (Delivery Mode) | Одночасна доставка на кілька столів з оптимальним плануванням маршруту |
|---|---|
| Круїзний режим (Cruise Mode) | Автономне патрулювання за заданим маршрутом із голосовою рекламою |
| Режим прямої доставки (Direct Delivery Mode) | Доставка в один бік до одного місця призначення без повернення на місце видачі |
| Режим "День народження" (Birthday Mode) | Доставка з настроюваною музикою до дня народження та матричним повідомленням |
| Спеціальний режим (Special Mode) | Власна музика та голос для освідчень, святкувань і спеціальних подій |
| Режим супроводу (Guiding Mode) | Привітання гостей та супровід до столика з автоповерненням на точку привітання |
Умови навколишнього середовища
| Робоча температура | 0–40 °C |
|---|---|
| Температура зберігання | -40–65 °C |
| Робоча вологість | Відносна вологість ≤ 85% |
| Максимальна робоча висота | < 2000 м |
Комплектація
- Робот-доставник PUDU BellaBot × 1
- Зарядний пристрій (29,4 В / 8 А) × 1
- Посібник користувача BellaBot × 1
- Сертифікат якості × 1
- Наліпка для позиціонування × 1
- Ключ живлення × 1
- Маркери доповненої реальності (AR Markers) × 1 комплект
Як увімкнути та розпочати першу доставку з BellaBot
Ця процедура описує, як запустити PUDU BellaBot і виконати першу доставку до столика за допомогою режиму доставки (Delivery Mode). Перш ніж виконувати ці кроки, переконайтеся, що карту приміщення налаштовано, а AR-маркери встановлено в закладі.
Крок 1: вставте акумулятор і активуйте ключ перемикача
Відкрийте кришку заднього акумуляторного відсіку, вставте літієву батарею на 25,6 А·год із гарячою заміною та поверніть ключ у положення ON. Надійно закрийте кришку. Ключ має бути у положенні ON, інакше кнопка живлення не зреагує.
Крок 2: встановіть робота на місце запуску
Для візуальної SLAM-навігації або комбінованої лазерної+візуальної SLAM-навігації перемістіть BellaBot безпосередньо під перший AR-маркер, обличчям до основного напрямку обслуговування. Для виключно лазерної SLAM-навігації розмістіть робота у визначеній точці запуску на налаштованій карті.
Крок 3: увімкніть живлення
Натисніть і утримуйте кнопку живлення протягом 1 секунди. Нижня світлодіодна стрічка заблимає, а на екрані з'явиться логотип завантаження, після чого з'явиться анімація запуску та робочий стіл Android. Додаток Pudu App запускається автоматично. Якщо він не з'явився, торкніться піктограми Pudu App на робочому столі.
Крок 4: виберіть режим доставки
У головному інтерфейсі Pudu App торкніться рядка меню та виберіть Delivery Mode. На екрані доставки відображається карта підносів і сітка номерів столів. Торкніться значка налаштувань, щоб налаштувати кількість стовпців або увімкнути багатоголосі підказки перед початком.
Крок 5: завантажте підноси та призначте номери столів
Поставте страви на відповідні підноси — до 10 кг на кожен піднос. На екрані торкніться кожного підноса, щоб призначити номер столика призначення. Робот автоматично розрахує найефективніший маршрут з кількома зупинками.
Крок 6: натисніть "Start!" і слідкуйте за доставкою
Натисніть Start! BellaBot по черзі прямує до кожного столика. Після прибуття загоряється світлодіод потрібного підноса і відтворюється голосова підказка. Після того, як гість забере страву, торкніться Done або кнопки з блискавкою — або увімкніть перемикач датчика підноса (Tray Sensor Switch) для повністю автоматичного переходу через 5 секунд. BellaBot повертається на місце видачі після завершення всіх доставок.
Як довго працює акумулятор BellaBot і чи можна його замінити без зупинки роботи?
Літієва батарея BellaBot на 25,6 А·год забезпечує від 12 до 24 годин автономної роботи за типових умов змішаного використання. Конструкція гарячої заміни дозволяє витягти розряджений блок і вставити попередньо заряджений за лічені секунди, підтримуючи безперервне обслуговування протягом повної подвійної зміни без будь-яких простоїв.
Як BellaBot уникає гостей, стільців та інших перешкод?
BellaBot використовує три взаємодоповнюючі рівні виявлення: 360° LiDAR, який безперервно картографує середовище, три фронтальні камери глибини RGBD із кутом виявлення 192,64° і дальністю понад 10 м, а також частоту оновлення виявлення перешкод до 5400 разів на хвилину. Це забезпечує час реакції на зупинку 0,5 секунди на такі динамічні перешкоди, як гості, що несподівано встають, або стільці, які відсуваються назад.
Які режими доставки підтримує BellaBot, окрім стандартного обслуговування столиків?
Доступно шість режимів: Delivery (оптимізована маршрутизація на кілька столів), Cruise (автономне патрулювання з голосовою рекламою), Direct Delivery (доставка в один бік до одного пункту призначення), Birthday (власна музика та матричне повідомлення), Special (музика для освідчень або святкувань) і Guiding (зустріч гостей на вході та супровід їх до столика).
Чи можуть кілька одиниць BellaBot працювати одночасно в одному закладі?
Так. BellaBot підтримує координацію парку з кількох роботів через Wi-Fi. Пристрої обмінюються даними про доступність док-станцій у режимі реального часу, тому кожен робот автоматично обирає найближчу вільну станцію забору страв. Під час пікового навантаження роботи розумно стають у чергу на тимчасових позиціях очікування, а не створюють затори на кухні.
Які типи підлоги та ширина коридорів потрібні для BellaBot?
BellaBot працює на рівній, гладкій підлозі в приміщенні. Його система підвіски справляється з нерівностями поверхні до 10 мм і кутами нахилу до 5°. Мінімальна ширина коридору становить 70 см для прямого руху та 65 см для поворотів. Він не призначений для використання на відкритому повітрі, на вологих поверхнях або липкому покритті підлоги.
Чому варто обрати EXPERT3D?
Компанія EXPERT3D спеціалізується на передовій робототехніці та 3D-технологіях з 2012 року — це понад десять років практичного досвіду вибору, впровадження та підтримки професійних платформ у сферах гостинності, роздрібної торгівлі, охорони здоров'я та дослідницьких інститутів. Як офіційний представник PUDU, ми гарантуємо найкращу ціну, авторизоване сервісне обслуговування та офіційну гарантію. Ми надаємо передпродажні технічні консультації, оцінку об'єкта для картографування навігації, координацію доставки по Іспанії та Європі, а також післяпродажну підтримку, забезпечену прямими контактами з виробником. Впровадження BellaBot включає конфігурацію карти, інтеграцію парку та навчання персоналу: наша команда супроводжуватиме вас на кожному кроці для плавного запуску. Зв'яжіться з нами, щоб обговорити специфічні вимоги вашого закладу та поточну наявність.
")













