
- Наявність: У наявності
- Код товару: 10311-000002
- Вага брутто: 240.00kg
PUDU T600 Underride — це автономний мобільний робот (AMR) для транспортування важких вантажів у промислових складах та виробничих об'єктах. Шасі висотою лише 255 мм пересувається безпосередньо під стелажами без жодних будівельних змін, витримує до 600 кг вантажу, використовує навігацію LiDAR SLAM і забезпечує проходження у проходах завширу від 65 см — реалізуючи повністю автоматизоване транспортування матеріалів з нативною інтеграцією ліфтів, електронних воріт та диспетчерської системи за протоколом VDA5050.
| Максимальне навантаження | 600 кг (1322,77 фунтів) |
|---|---|
| Висота шасі | 255 мм |
| Мінімальна ширина проходу | 65 см |
| Автономність батареї | 12 год (без навантаження) / 6 год (макс. навантаження) |
Перегляньте серію PUDU T600 в реальному промисловому середовищі — обидві конфігурації (Standard та Underride) виконують автономне переміщення, стикуються зі стелажами і координують логістику між поверхами.
Обидві варіанти платформи T600 — Standard та Underride — базуються на одному шасі з рейтингом 600 кг, надаючи логістичним менеджерам можливість обрати модель розгортання відповідно до інфраструктури складського зберігання без жертвування вантажопідйомністю.

Низькопрофільне Шасі для Роботи під Стелажами
Головна конструктивна особливість T600 Underride — висота корпусу лише 255 мм. Де традиційні AMR вимагають піднятих вантажних платформ або додаткового підйомного обладнання, T600 Underride просто заїжджає під наявні конструкції стелажів, піднімає їх знизу та транспортує весь стелаж автономно. Жодних змін у приміщенні. Жодної заміни стелажів. Розміри шасі 845 × 500 мм оптимізовані під стандартні стелажні модулі, поширені в європейських розподільчих центрах.
Підстелажний підхід усуває цілий крок вантажообробки з робочого процесу. Робот стає рушійною силою самого стелажу — конструктивно чисте й масштабоване рішення для автоматизації типу «товар до оператора» у зонах високої щільності зберігання.

Розпізнавання Груп Стелажів — Автономне Підбирання і Встановлення
Підстелажна навігація вимагає більшого, ніж просте LiDAR-картографування: робот повинен ідентифікувати потрібну цільову позицію серед групи однакових стелажів, виконати точне стикування і від'їхати без механічного контакту. Алгоритми розпізнавання T600 Underride справляються з усіма трьома завданнями. Підтримуються два режими підходу до точки стикування:
- Рух заднім ходом: робот заїжджає до призначеної точки зупинки у зворотньому напрямку — максимальна точність стикування та повторюваність вирівнювання
- Пряме прибуття: робот рухається до цільової позиції та коригує орієнтацію на місці — швидший варіант для відкритих планувань підлог
Системні інтегратори можуть призначати режим підходу для кожної групи стелажів залежно від геометрії проходу, зберігаючи найточніший режим для щільних стелажних масивів з мінімальним зазором.
На зображенні нижче показано, як T600 Underride стикується під завантаженими складськими стелажами й вирушає до цільових пунктів призначення — демонструючи підстелажний зазор та точність автономного позиціонування.

Навігація LiDAR SLAM у Проходах завширу від 65 см
T600 Underride використовує виключно LiDAR SLAM (лазерна одночасна локалізація та картографування) як метод навігації — без камер SLAM на основі зору, без QR-кодів на стелі, без наземних маркерів. Це має практичне значення: LiDAR SLAM будує і безперервно оновлює геометричну карту середовища, витримуючи динамічні зміни — переміщені стелажі, тимчасово заблоковані проходи — без необхідності повного перекартографування. Розгортання адаптується до змін виробничого планування за хвилини, а не за дні.
Мінімальна ширина проходу 65 см дає змогу T600 Underride працювати в конфігураціях проходів, недоступних для більшості конкуруючих AMR. При ширині шасі 500 мм робот має загальний запас 15 см у проході 65 см — достатньо навіть за умов, коли вантаж може трохи виступати за межі шасі.
На зображенні нижче кілька одиниць T600 Underride транспортують пластикові контейнери у вузькому складському проходу — реальна конфігурація, що демонструє щільність руху, з якою система інтелектуального планування здатна впоратися.

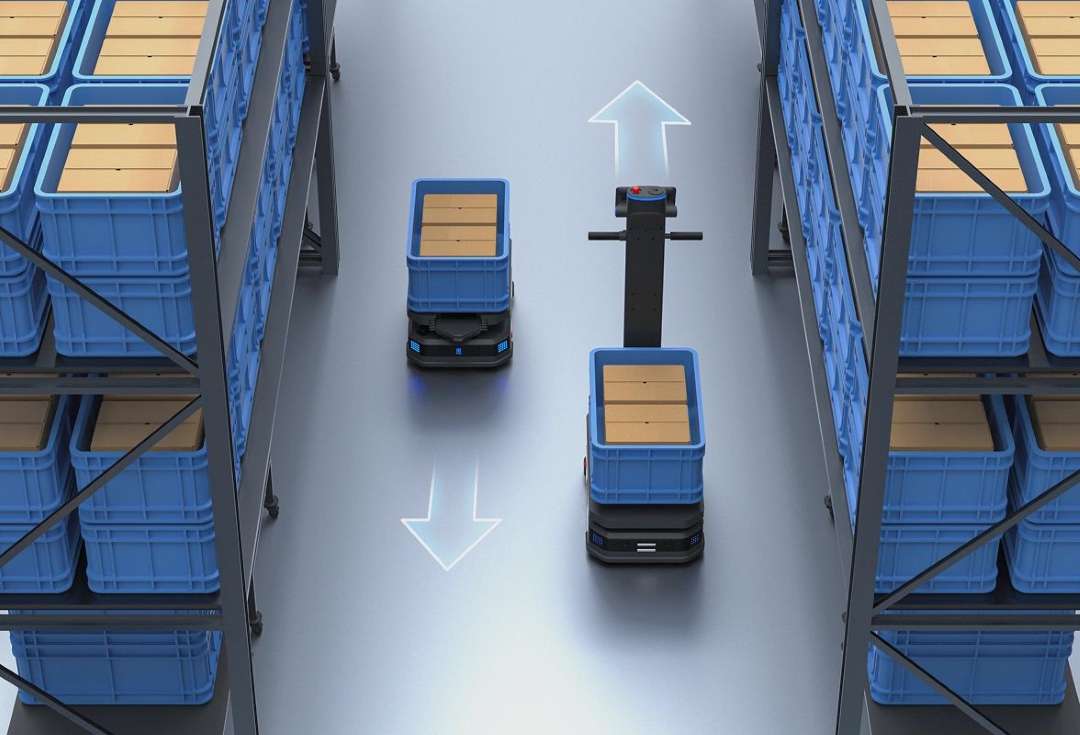
Інтелектуальна Стратегія Руху у Вузьких Проходах
Коли парк одиниць T600 спільно використовує об'єкт, пропускна здатність проходу стає критичним вузьким місцем. Диспетчерська система PUDU відстежує поточне положення кожного робота та завантажені розміри в реальному часі, а потім динамічно визначає, чи може поточна ділянка проходу підтримувати однорядний або дворядний рух. Роботи ніколи не ставляться в чергу там, де геометрія дозволяє двосторонній рух. Навпаки, якщо завантажена ширина може поставити під загрозу безпечний прохід, система автоматично застосовує пріоритет однорядного руху.
На цьому вигляді зверху два T600 одночасно рухаються одним вузьким проходом у протилежних напрямках — система розрахувала, що геометрія проходу та поточні розміри навантаження дозволяють двосмуговий рух, залишаючи обох роботів у русі без затримок.
Інтеграція з Ліфтами та Міжповерхова Логістика
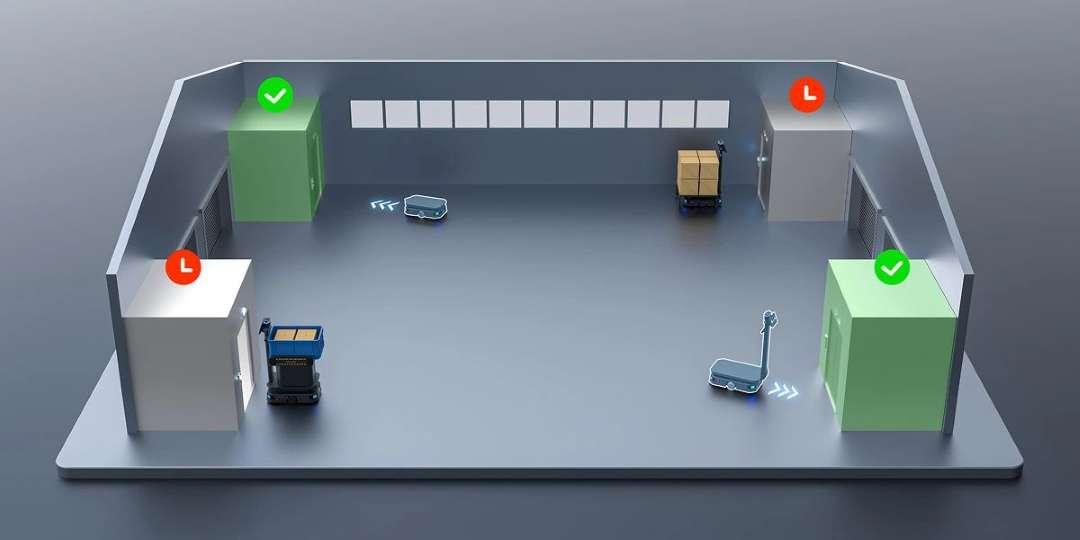
Складська логістика на кількох поверхах створює системну неефективність: роботи в черзі до зайнятих ліфтів у пікові години. T600 Underride вирішує це завдяки алгоритму планування ліфтів з пріоритетом вільних кабін — диспетчерська система відстежує всі ліфтові кабіни в реальному часі та надає перевагу маршрутизації роботів до наразі вільних кабін, мінімізуючи накопичення часу очікування та перевантаженість ліфтів у пікові години. Для об'єктів з кількома ліфтовими блоками алгоритм перехресно аналізує відстань переміщення та розрахунковий час очікування для вибору оптимального диспетчерського пункту.
Карта диспетчеризації нижче показує план поверху складу з чотирма позиціями ліфтів. Зелені позначки вказують на ліфти, доступні для негайної відправки роботів; червоні індикатори позначають зайняті або заблоковані кабіни. Диспетчер автоматично направляє найближчого очікуючого робота до кабіни з зеленим статусом.
Окрім управління ліфтами, T600 Underride нативно підключається до повної екосистеми IoT-периферії:
- управління електронними воротами — автоматизований доступ до дверей і шлагбаумів на маршрутах роботів
- система виклику через пейджер — диспетчеризація завдань з апаратних терміналів
- застосунок PUDU Link — моніторинг у реальному часі, управління завданнями та контроль роботів з мобільних пристроїв
- інтерфейс апаратних периферійних пристроїв — розширюваний для користувацьких систем об'єкта та інтеграції зі сторонніми WMS
- розгортання на власних серверах — локальний сервер або приватна хмара для безпеки даних у закритій мережі
Багаторівнева Архітектура Безпеки для Спільної Роботи Людини та Робота
T600 Underride працює в середовищах, де поряд присутні люди та обладнання ручного управління. Його комплекс безпеки поєднує LiDAR для кругового 360° картографування середовища, спрямовані донизу RGBD-камери глибини для виявлення низьких перешкод та датчики зіткнення по периметру шасі для захисту від прямого контакту. Фронтальна камера доповнює набір сенсорів для додаткового контролю ділянки попереду. Всі зони активні одночасно під час руху.
На радарній візуалізації показано активне поле виявлення T600 — концентричні сенсорні зони розширюються від шасі, виявляючи наближення жовтого ручного гідравлічного візка до того, як контакт стає можливим. Це багатозонне виявлення дає роботу достатньо часу для планування плавної траєкторії об'їзду замість різкої зупинки.

Динамічний Об'їзд Перешкод — Включно з Низькопрофільними Об'єктами
При висоті шасі 255 мм площина сканування LiDAR T600 Underride знаходиться близько до підлоги — тобто об'єкти нижче основного детекційного пучка (картонні залишки, дрібне обладнання, сміття) теоретично можуть залишитися непоміченими. Спрямовані донизу RGBD-камери закривають цю прогалину: вони виявляють низькі перешкоди та ініціюють автономний перерозрахунок маршруту без переривання руху всього парку. Один робот коригує маршрут; інші продовжують виконання завдань.
Як показано тут, складський працівник наближається до шляху руху T600. Комбінована сенсорна система фіксує присутність людини та виконує плавний маневр об'їзду, зберігаючи безперервність виконання завдання та дотримуючись безпечної дистанції — управління взаємодією людини і робота, яке не потребує фізичних огорож або зон виключення.

Аварійне Уникнення — Протокол Реагування на Надзвичайні Ситуації
T600 Underride інтегрується з будівельною інфраструктурою безпеки через спеціалізований модуль аварійного уникнення. При отриманні сигналів пожежної сигналізації, сейсмічних датчиків або інших рівнозначних тригерів надзвичайної ситуації, робот негайно виконує одну з двох попередньо запрограмованих відповідей: автономний рух до найближчої призначеної безпечної зони паркування або контрольована зупинка в найближчій безпечній позиції. Це запобігає блокуванню евакуаційних шляхів завантаженими роботами під час надзвичайних ситуацій.
На ілюстрації показано одночасну відповідь парку роботів на рівні флоту — індикатори попередження активуються на всіх роботах, і кожна одиниця перераховує свій маршрут для звільнення активних робочих зон, запобігаючи складним ризикам від блокування евакуації роботами з вантажем.

Цілодобова Робота — 12 Годин Автономності зі Швидким Заряджанням
Одна одиниця T600 Underride забезпечує 12 годин безперервної роботи без навантаження — та 6 годин при максимальній вантажопідйомності 600 кг. Цього достатньо для повної стандартної зміни з достатнім запасом. Літій-іонний акумулятор ємністю 30 Ач заряджається до 90% приблизно за 2 години, уможливлюючи перезарядку між змінами без ручного управління акумулятором.
Одночасно підтримуються дві стратегії заряджання: автоматичне стикування на зарядній станції (робот самостійно рухається до найближчої доступної станції при падінні рівня заряду нижче налаштованого порогу) та гаряча заміна акумулятора, яка підтримує живлення робота протягом 60 секунд при вийманні — для безшовної заміни. Обидві моделі, Standard та Underride, використовують однакову платформу зарядної станції, як показано нижче.

Флітова Аналітика — Моніторинг у Реальному Часі на Кількох Поверхах
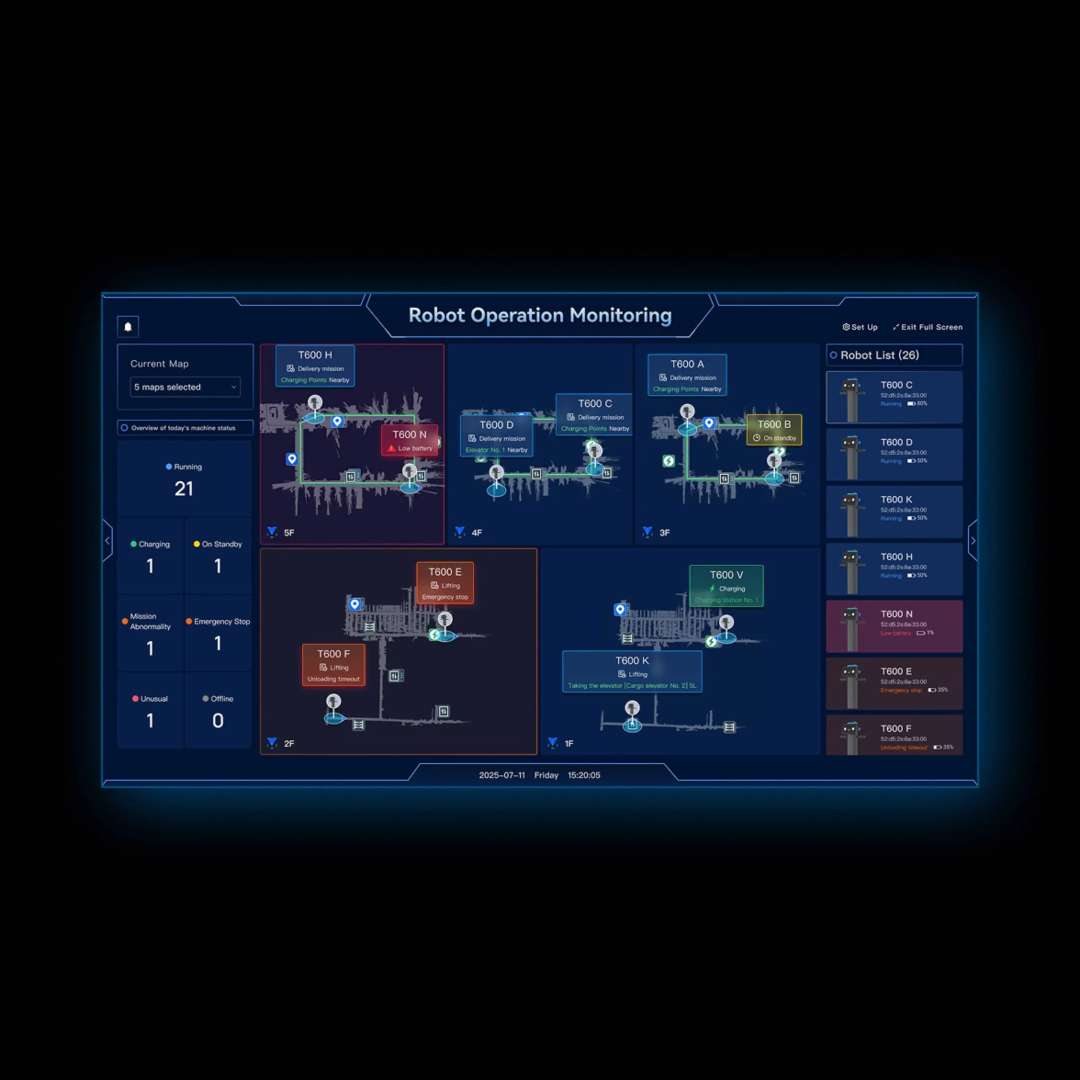
Одна одиниця T600 Underride — це потужний логістичний актив. Скоординований парк трансформує пропускну здатність складу. Платформа управління парком PUDU консолідує всі одиниці T600 на поверхах, будівлях і майданчиках в єдину панель оперативних операцій у реальному часі — відображаючи тип завдання, відсоток заряду акумулятора, статус сповіщень і фізичне розташування на поверсі кожного активного робота одночасно.
Показана тут панель управляє 26 роботами T600, розподіленими по п'яти поверхах. Кольорові індикатори статусу відрізняють активно працюючих роботів від тих, що заряджаються, перебувають у режимі очікування, аварійній зупинці або з позначеними аномаліями завдань — забезпечуючи операційним наглядачам повну ситуаційну обізнаність без необхідності обходу об'єкта.
У більш широкому масштабі відповідність протоколу VDA5050 T600 Underride дозволяє йому працювати як рівноправний вузол у багатопостачальницьких інтелектуальних логістичних екосистемах — плануватися разом з будь-якими іншими активами, сумісними з VDA5050, без власної інтеграції. Протокол усуває прив'язку до власницьких систем, що традиційно фрагментувала проєкти автоматизації складів, забезпечуючи єдиний уніфікований рівень планування для різних роботизованих платформ.
Огляд нижче показує великий промисловий об'єкт з десятками роботизованих платформ — AMR, роботизованими маніпуляторами, сервісними роботами — скоординованих через спільну WiFi-інфраструктуру. T600 Underride бере участь як повноправний член цього підключеного середовища, отримуючи та передаючи дані про завдання через ту саму мережеву магістраль.

Серія T600 — Конфігурації Underride та Standard
T600 Underride — одна з двох варіацій платформи, що базуються на одному шасі з вантажопідйомністю 600 кг. Її аналог, T600 Standard, доповнений сенсорним екраном 10,1 дюйма для автономної роботи без центральної системи управління, ергономічною ручкою з допоміжним перемикачем приводу, фронтальним проєктором захисного контуру та гібридною навігацією VSLAM+LiDAR. Версія Standard має розміри 960 × 500 × 1350 мм та важить 112 кг — підходить для наземного транспортування вантажів на зовнішніх вантажних платформах вище рівня стелажів.
Версія Standard показана тут із зовнішньою вантажною підставкою, що транспортує складені великі коробки — демонструючи конфігурацію з піднятою платформою, яка доповнює підстелажний підхід Underride у розгортанні змішаного парку.

Допоміжний перемикач ручки на моделі Standard розроблений для моментів, коли необхідне ручне переміщення — натискання перемикача активує електричний привод, полегшуючи керування роботом навіть під значним навантаженням. Цей інтерфейс відсутній на Underride (який працює виключно під автономним управлінням або через диспетчерську систему), але відображає філософію проєктування платформи T600: зручність для оператора в кожній точці взаємодії.
На зображенні тут оператор використовує ручку з допоміжним приводом для ручного управління T600 Standard у складському проходу з синіми ящиками — ілюстрація режиму взаємодії людини та машини, доступного в конфігурації Standard під час налаштування, технічного обслуговування або ручного скасування завдання.

Технічна порада: Перед першим виробничим завданням налаштуйте завантажені розміри робота в Налаштування > Функції робота > Параметри руху > Загальна ширина (Y) (діапазон: 500–1200 мм) та Задній виступ (X) (діапазон: 0–400 мм), щоб вони відповідали фактичному сліду T600 Underride з приєднаним стелажем або вантажною конструкцією. Алгоритм стратегії руху у вузьких проходах використовує ці виміри в реальному часі для розрахунку придатності двосмугового руху. Занижені значення не дозволять системі використовувати двосмуговий режим навіть якщо геометрія це допускає; завищені значення непотрібно застосовуватимуть однорядну маршрутизацію, знижуючи пропускну здатність. Також переконайтеся, що дзеркальні або прозорі поверхні на висоті 14–22 см оброблені матовими наклейками перед розгортанням — вони можуть заважати локалізації на основі LiDAR на робочій висоті T600 Underride.
Багаторівнева система просторової обізнаності — що поєднує LiDAR-виявлення діапазону, RGBD-камери глибини та датчики зіткнення — створює перекриваючі зони виявлення, які враховують низький профіль шасі робота. Візуалізація нижче показує одиниці Standard та Underride, що активно картографують свої зони виявлення датчиків у живому складському середовищі, при цьому наземна перспектива Underride забезпечує особливо щільне покриття для низьких перешкод.

Технічні характеристики PUDU T600 Underride
Фізичні розміри
| Розміри (Д × Ш × В) | 845 × 500 × 255 мм (33,3 × 19,7 × 10,0 дюйм) |
|---|---|
| Маса робота | 94 кг (207,23 фунтів) |
| Максимальне навантаження | 600 кг (1322,77 фунтів) |
| Тип шасі | Underride (низький профіль, підстелажна навігація) |
Продуктивність та акумулятор
| Робоча напруга | DC 20,8 В ~ 29,2 В |
|---|---|
| Ємність акумулятора | 30 Ач |
| Час заряджання | Прибл. 2 год (від 0% до 90%) |
| Автономність акумулятора | 12 год (без навантаження); 6 год (макс. навантаження 600 кг) |
| Крейсерська швидкість | 0,2–1,2 м/с (регульована) |
Навігація та сенсори
| Метод навігації | LiDAR SLAM (виключно Laser-SLAM) |
|---|---|
| Сенсори | LiDAR, RGBD-камери (спрямовані донизу), датчики зіткнення, фронтальна камера |
| Мінімальна ширина прохідності | 65 см (25,6 дюйм) |
| Макс. висота перешкоди (перезд) | 10 мм (0,39 дюйм) |
| Макс. подолання зазору | 35 мм (1,38 дюйм) |
Умови експлуатації
| Температура експлуатації | 0°C ~ 40°C (32°F ~ 104°F) |
|---|---|
| Висота над рівнем моря | < 2000 м (6561,68 фут) |
| Температура зберігання акумулятора | -20°C ~ 60°C (до 1 місяця); 25%–50% відносна вологість |
| Вимоги до підлоги | Суха, рівна поверхня; макс. нахил ≤ 3° |
| Підтримуваний протокол | VDA5050 |
Як запустити та розгорнути PUDU T600 Underride
Покрокова процедура першого ввімкнення, налаштування розмірів та підготовки до першого розгортання автономного мобільного робота PUDU T600 Underride, на основі офіційного Посібника з експлуатації V1.1.1.
Крок 1: Початкове заряджання до 100%
Перед першим оперативним використанням зарядіть акумулятор до 100% за допомогою зарядного пристрою в комплекті або стикувавшись на автоматичній зарядній станції. Вставте дротовий зарядний пристрій у порт заряджання або виберіть «Зарядити зараз» в інтерфейсі програмного забезпечення PUDU для автоматичного стикування. Не використовуйте робота при частковому заряді під час першого введення в експлуатацію.
Крок 2: Увімкнення робота
Натисніть і утримуйте перемикач живлення протягом приблизно 3 секунд, доки індикатори шасі не засяють синім кольором. Це підтверджує, що робот завершив послідовність завантаження і готовий до налаштування або автономної відправки. Для вимкнення утримуйте перемикач живлення протягом 8 секунд (специфічна процедура Underride — довша, ніж для версії Standard).
Крок 3: Налаштування завантажених розмірів
Перейдіть до Налаштування > Функції робота > Параметри руху та встановіть розміри експлуатації відповідно до завантаженого сліду робота. Встановіть Задній виступ (X) в межах 0–400 мм і Загальну ширину (Y) в межах 500–1200 мм, щоб відобразити фактичні розміри з приєднаним стелажем або вантажною конструкцією. Ці параметри керують стратегією руху у вузьких проходах — неправильні значення знижують пропускну здатність парку.
Крок 4: Активація перемикача гальма
Перевірте, що перемикач гальма знаходиться в положенні ON (I) перед автономною роботою. Положення ON вмикає систему гальмування приводних коліс для нормального автономного руху. Встановлюйте в OFF лише при ручному пересуванні робота під час технічного обслуговування або налаштування — у режимі OFF робот не рухатиметься автономно.
Крок 5: Перевірка аварійної зупинки
Натисніть червону кнопку аварійної зупинки на верхній частині шасі, щоб переконатися, що вона негайно зупиняє робота. Поверніть кнопку за годинниковою стрілкою для розблокування та відновлення нормальної роботи. Завжди перевіряйте роботу аварійної зупинки перед тим, як робот в'їзджає в активну робочу зону, де присутній персонал.
Крок 6: Відправка першого завдання
Після ввімкнення робота, налаштування розмірів та активації гальма відправте перше завдання доставки через диспетчерську систему PUDU або сумісну платформу управління парком VDA5050. Контролюйте перший запуск через застосунок PUDU Link або веб-панель моніторингу парку, щоб підтвердити точність локалізації та якість стикування на цільових позиціях стелажів.
Яка максимальна вантажопідйомність PUDU T600 Underride?
PUDU T600 Underride має максимальну номінальну вантажопідйомність 600 кг (1322,77 фунтів). Автономність акумулятора при повному навантаженні 600 кг становить 6 годин; без навантаження — 12 годин від одного заряду ємністю 30 Ач.
У чому різниця між T600 Underride та T600 Standard?
T600 Underride (845 × 500 × 255 мм, 94 кг) — це низькопрофільне чисте шасі для підстелажної навігації, яке використовує виключно LiDAR SLAM. Воно не має вбудованого екрана, ручки з допоміжним приводом та фронтального проєктора безпеки. T600 Standard (960 × 500 × 1350 мм, 112 кг) доповнений сенсорним екраном 10,1 дюйма для автономної роботи без центральної системи управління, ергономічною ручкою з допоміжним приводом, фронтальним проєктором захисного контуру та гібридною навігацією VSLAM+LiDAR. Обидві версії перевозять до 600 кг і мають однакову платформу для акумулятора та заряджання.
Чи підтримує PUDU T600 Underride протокол VDA5050?
Так. Серія PUDU T600 сумісна зі стандартним протоколом зв'язку VDA5050, що забезпечує скоординоване планування з іншими сумісними роботами, системами WMS та платформами управління парком. Не потрібні власна розробка або власне middleware — робот підключається до мережі логістики, сумісної з VDA5050, з коробки.
Яка мінімальна ширина проходу для T600 Underride?
T600 Underride вимагає мінімальної ширини прохідності 65 см (25,6 дюйм). При ширині шасі 500 мм загальний зазор у проході 65 см становить 15 см. Інтелектуальна стратегія руху у вузьких проходах динамічно управляє однорядним та дворядним потоком залежно від розмірів навантаження в реальному часі для максимізації пропускної здатності в цих умовах.
Чи підтримує T600 Underride управління ліфтами для багатоповерхових операцій?
Так. Серія T600 включає нативну IoT-інтеграцію ліфтів з плануванням пріоритету вільних кабін — система відстежує доступність ліфтів у реальному часі та направляє роботів переважно до неактивних кабін, мінімізуючи затримки доставки між поверхами в пікові години. Також підтримуються додаткові IoT-периферійні пристрої: управління електронними воротами, системи виклику через пейджер та мобільний застосунок PUDU Link.
Як T600 Underride реагує на пожежну сигналізацію або надзвичайні ситуації?
T600 Underride оснащений спеціалізованим модулем аварійного уникнення, підключеним до систем безпеки будівлі. При отриманні сигналу пожежної сигналізації або сейсмічного сенсора робот автономно рухається до попередньо визначеної безпечної зони паркування або виконує контрольовану зупинку в найближчій безпечній позиції. Це запобігає блокуванню евакуаційних шляхів завантаженими роботами під час надзвичайних ситуацій.
Чому обрати EXPERT3D?
EXPERT3D — спеціаліст у галузі передової робототехніки та промислової автоматизації з 2012 року, що обслуговує клієнтів в Іспанії та по всій Європі. Наша команда надає консультації перед продажем, технічну підтримку розгортання та постобробку для серії PUDU T600 — допомагаючи обрати правильну конфігурацію, спланувати розміщення обладнання та інтегрувати робота з наявною інфраструктурою WMS або управління парком. Швидка доставка по ЄС, конкурентні ціни в € та кваліфікована технічна підтримка включені. Зв'яжіться з нами для обговорення вашого проєкту автоматизації логістики ➔











")







")
")

")