")
- Наявність: У наявності
- Код товару: 10310-000002
- Вага брутто: 240.00kg
Робот PUDU T600 — це автономний мобільний робот (AMR) промислового класу, призначений для важкої внутрішньої логістики на виробничих підприємствах і складах, здатний перевозити до 600 кг за один рейс без оператора на борту. Доступний у версіях Standard та Underride, він поєднує навігацію VSLAM разом із LiDAR SLAM у дворівневій архітектурі, автономно розпізнає позиції стелажів і інтегрується безпосередньо з системами керування ліфтами будівлі через IoT. Акумулятор ємністю 30 А·год забезпечує 12 годин безперервної роботи без навантаження та 6 годин при максимальному навантаженні, а цикл швидкого заряджання за 2 години підтримує роботу флоту цілодобово.
| Максимальна вантажопідйомність | 600 кг (1 322 фунти) |
|---|---|
| Метод навігації | VSLAM + LiDAR SLAM (Standard); лише LiDAR SLAM (Underride) |
| Час роботи від акумулятора | 12 год (без навантаження) / 6 год (максимальне навантаження) |
| Час заряджання | Прибл. 2 год (від 0 % до 90 %) |
На фронтальному фото версії Standard видно компактну основу шасі та піднята вежа керування з сенсорним дисплеєм і ергономічною ручкою — конструктивні рішення, що роблять робота помітним і доступним для операторів у спільних зонах роботи людини та машини.

Вантажопідйомність 600 кг: що це означає для промислової логістики
Більшість AMR-роботів легкого класу обмежені 100–200 кг — цього достатньо для візків з документами або харчових тележок. PUDU T600 функціонує в принципово іншій категорії: транспортування сировини між виробничими осередками, переміщення піддонів між поверхами та масові рейси контейнерів у широкопрохідних складах. При вантажопідйомності 600 кг один рейс T600 може замінити від чотирьох до шести ручних рейсів, що безпосередньо скорочує витрати праці та навантаження на навантажувачі у перевантажених логістичних коридорах.
Обидві конфігурації — Standard (з вертикальною вежею) та Underride (плоске шасі) — мають однаковий рейтинг 600 кг. Зображення нижче демонструє обидва варіанти поруч із максимальним навантаженням.

Версія Standard проти Underride: вибір правильної конфігурації
Серія T600 пропонує дві структурно різні апаратні варіанти, адаптовані до різних умов робочого середовища. Версія Standard має висоту 1 350 мм і включає сенсорний дисплей 10,1 дюйма, ергономічну ручку з підсилювачем зусилля, передні індикаторні вогні та проєктор безпеки на підлозі. Вона оптимальна для об'єктів, де оператори мають призначати завдання локально або де спільне середовище роботи вимагає виразно видимого профілю робота. Версія Underride знижує висоту до 255 мм — достатньо, щоб ковзати під стелажами зберігання, піднімати цілі стелажні одиниці та виконувати операції goods-to-person без жодного ручного втручання біля стелажа. Обидві моделі важать менше 115 кг і спільно використовують акумулятор 30 А·год, протокол VDA5050 та межу вантажопідйомності 600 кг.
На зображенні нижче обидва варіанти підключаються до своїх станцій автоматичного заряджання — ключовий елемент для підтримки безперервної роботи у багатозмінних графіках без ручного втручання в акумулятор.

Розпізнавання груп стелажів: автономна робота «підбір і розміщення» без ручного вирівнювання
Навігаційна архітектура T600 може визначати конкретні місця зберігання в налаштованій групі стелажів і позиціонуватися для операцій підбору та розміщення без зчитувачів штрих-кодів або ручного наведення. Дані камери VSLAM та злиття сенсорів LiDAR визначають цільову позицію та обчислюють фінальний підхід до місця стикування з повторюваною точністю. Диспетчер флоту надсилає ідентифікатор пункту призначення; робот самостійно керує підходом, захватом вантажу та виходом. У версії Underride це розширюється до підйому цілих стелажних одиниць — робот заїжджає під стелаж, активує механізм підйому та транспортує повний стелаж до наступної робочої станції.
На зображенні нижче показано одиницю Underride, що займає позицію під складськими стелажами, при цьому підйомний механізм готовий до повного циклу транспортування стелажа без участі персоналу.

Для моделі Standard міцна вантажна платформа дозволяє перевозити штабельовані вантажі, що наближаються до значної частини межі в 600 кг. На зображенні нижче T600 Standard транспортує дві великі штабельовані картонні коробки на вантажній підставці з повною структурною стабільністю.

Архітектура навігації: чому VSLAM + LiDAR SLAM — це не надмірність, а надійність
Покладатися на одну модальність навігації в реальному промисловому середовищі означає нести ризик надійності. LiDAR SLAM будує точну 2D-карту рівня підлоги, але зазнає труднощів біля скляних перегородок, дзеркальних поверхонь та геометрично однотипних стелажів. VSLAM додає візуальний шар, орієнтований на стелю, що прив'язує позиціонування до стабільних орієнтирів на стелі незалежно від того, що відбувається на рівні підлоги. T600 Standard об'єднує обидва потоки в реальному часі: коли один сигнал погіршується, інший підтримує безперервність локалізації. Варіант Underride використовує лише LiDAR SLAM, що є достатнім для його обмеженого середовища під стелажами.
Діаграма багатошарового сенсорного поля нижче ілюструє, як LiDAR, нижні RGBD-камери глибини та датчики зіткнення спільно формують пошаровий простір просторової обізнаності навколо кожної одиниці T600.

Динамічне уникнення перешкод: реакція на транспалети, персонал та рухоме обладнання
Промислові склади — це не статичні тестові середовища. Навантажувачі змінюють позиції, персонал перетинає проходи, а транспалети залишаються в транзитних коридорах нижче висоти сканування LiDAR. Система динамічного уникнення перешкод T600 охоплює всі три сценарії: RGBD-камери глибини, спрямовані вниз, виявляють низькопрофільні об'єкти, які LiDAR пропустив би; буферні датчики зіткнення забезпечують фінальний фізичний захисний рубіж; алгоритм перепланування маршруту в реальному часі перераховує шлях щойно підтверджується статична перешкода. Рухомі перешкоди активують зниження швидкості з подальшою повною зупинкою до будь-якого контакту.
Візуалізація сенсорного сканування нижче показує T600, що виявляє транспалет у межах свого захисного периметра — кільця кругового сканування LiDAR кількісно визначають відстані зазору навколо перешкоди перед прийняттям рішення про об'їзд.

Проєкція безпеки на підлогу: попереджувальний сигнал, зрозумілий без слів
Одиниці T600 у версії Standard проєктують лінійну червону попереджувальну позначку на підлогу безпосередньо перед напрямком руху робота. Цей проєктор контуру безпеки виконує конкретну функцію у змішаному середовищі роботи людини та машини: він повідомляє про зайнятий зоні руху робота через візуальний сигнал на рівні підлоги, який персонал розпізнає інстинктивно — без необхідності читати дисплей або реагувати на звукове сповіщення. Проєкція відстежує напрямок руху робота в реальному часі, гарантуючи, що захисна межа завжди правильно орієнтована відносно напрямку руху. Ця функція доступна виключно у версії Standard і відсутня у варіанті Underride.
На зображенні нижче складський працівник помічає червону проєкцію T600 на підлозі та коригує свій маршрут — проєктор виступає пасивним постійно активним каналом комунікації між роботом і персоналом у тому ж проході.

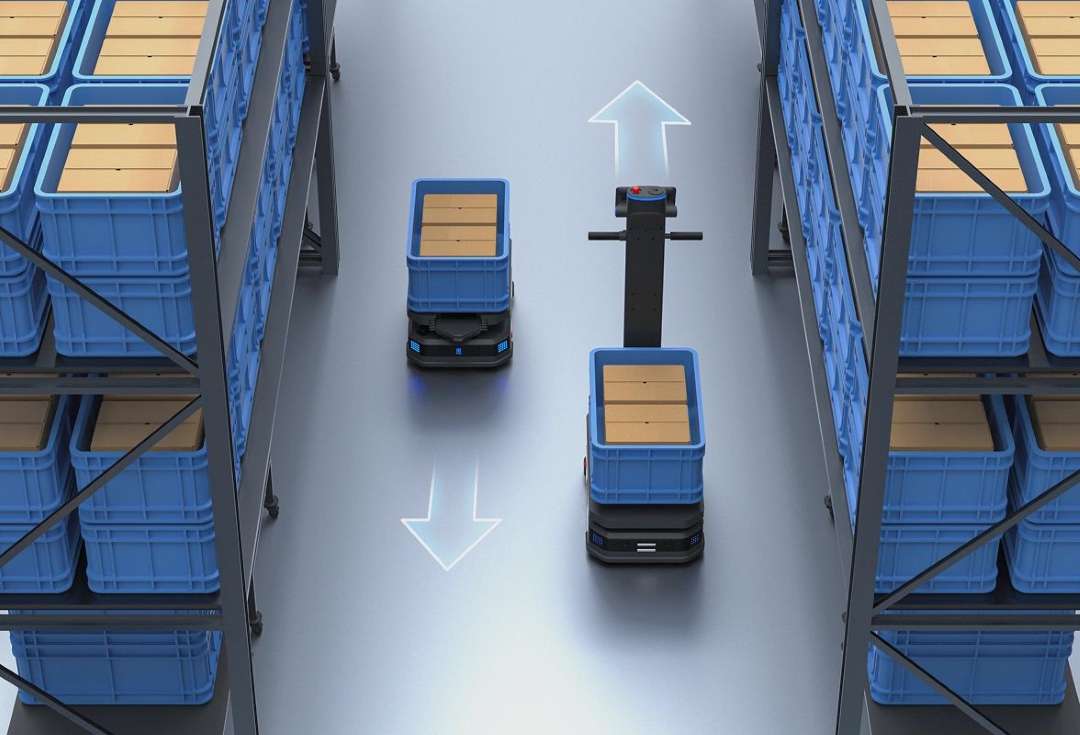
Інтелектуальне управління вузькими проходами: динамічний одно- та двосмуговий рух
Координація кількох важких AMR у коридорах, що ледве дозволяють двостороннє переміщення, є одним із найскладніших операційних завдань у щільних складах. Стратегія інтелектуального руху у вузьких проходах T600 вирішує це на рівні диспетчера флоту: система оцінює ширину проходу в реальному часі відносно фактичних фізичних розмірів кожного робота — включаючи будь-який бічний виступ вантажу, зареєстрований у меню налаштування Robot Functions — і автоматично визначає, чи можуть дві одиниці проїхати одночасно (двосмуговий режим), чи мають рухатися послідовно (односмуговий режим). Широкі вантажі маршрутизуються послідовно; вужчі можуть перетинатися одночасно. Результат — максимальна пропускна спроможність проходу без ризику зіткнення, перерахована на кожному проїзді на основі фактичної геометрії вантажу.
На зображенні нижче показано дві одиниці T600, що рухаються у протилежних напрямках вузьким складським коридором — алгоритм двостороннього руху визначив, що одночасний проїзд є геометрично безпечним для поточних вантажів обох одиниць.
Коли основні маршрути недоступні — припаркований робот, частково заблокована секція або тимчасово обмежена зона — диспетчер флоту видає інструкції з перемаршрутизації в реальному часі. На зображенні нижче кілька одиниць Underride у стелажному середовищі для контейнерів виконують рішення з перемаршрутизації, зі стрілками напряму, що підтверджують альтернативні траєкторії.

Уникнення надзвичайних ситуацій: система безпеки поза стандартними специфікаціями AMR
Більшість промислових AMR зупиняються, зустрічаючи перешкоду, та сповіщають оператора. T600 виходить за ці рамки завдяки спеціалізованому Модулю уникнення надзвичайних ситуацій, що підключається безпосередньо до аварійної інфраструктури об'єкта: конкретно — до панелей пожежної сигналізації та датчиків сейсмічного виявлення. Отримавши сигнал про пожежу або землетрус, робот автоматично виконує попередньо запрограмовану аварійну реакцію: автономну навігацію до заздалегідь визначеної безпечної зони паркування або інтелектуальну зупинку на місці у позиції, обраній для мінімізації перешкод евакуаційним шляхам. Флот одиниць T600 не зависає у робочих позиціях під час аварії на об'єкті — він організовано звільняє операційну зону.
Сценарій нижче ілюструє поведінку уникнення аварій на рівні флоту: кілька одиниць T600 отримують попереджувальні сигнали (помаранчеві трикутники) і автоматично коригують маршрути, щоб уникнути активованих зон тривоги, координовано через центральний диспетчер для запобігання затормошень під час евакуаційної послідовності.

Ручка з підсилювачем зусилля: ручне керування під повним навантаженням
Навіть у повністю автоматизованому складі іноді потрібне ручне перепозиціонування — після технічного обслуговування, під час первинного картографування об'єкта або при проведенні через тимчасово не картографовану зону. Вручну переміщати 112-кілограмового робота з вантажем у сотні кілограмів — це не завдання для однієї людини без допомоги. Ергономічний перемикач ручки з підсилювачем зусилля версії Standard вирішує це: натискання перемикача активує режим моторизованої допомоги, що підсилює зусилля оператора до рівня, яким може керувати одна людина. Ця функція відсутня у версії Underride.
На зображенні нижче оператор використовує ручку з підсилювачем для ручного керування T600 Standard, поки той несе повністю завантажену вантажну підставку — практична корисність механізму допомоги в реальному сценарії технічного обслуговування на складі.

Технічна порада: При розгортанні одиниць T600 на пандусах або нахилах 3° допустима вантажопідйомність зменшується зі збільшенням висоти центру мас (ЦМ) вантажу та його бічного зміщення. Посібник з експлуатації містить таблиці залежності висоти вантажу від зміщення ЦМ, що визначають максимально допустиме навантаження при кожній комбінації нахилу. Перед відправленням максимально завантаженого робота через будь-який пандус переконайтеся, що зміщення ЦМ вантажу знаходиться в межах допустимого діапазону для того рівня навантаження — це налаштовується в меню Налаштування > Функції Робота > Налаштування Роботи.
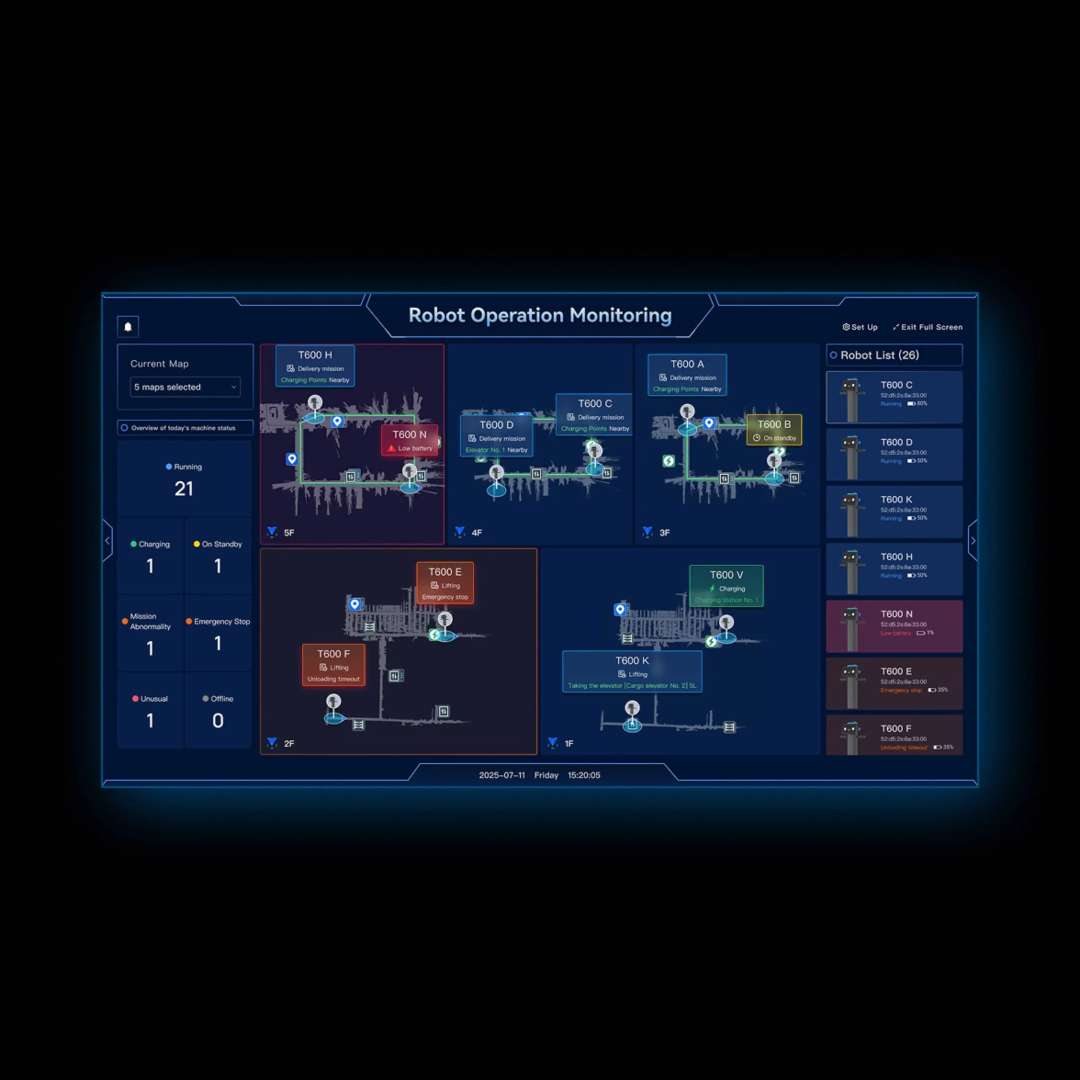
Планування флоту, протокол VDA5050 та інтеграція IoT
T600 спроєктований як вузол мережі, а не ізольована одиниця. Відповідність протоколу VDA5050 забезпечує стандартизований інтерфейс зв'язку для отримання даних про завдання, звітування про стан та координації з іншими сумісними роботами VDA5050 незалежно від виробника. Змішаний флот одиниць T600 поряд з іншими сумісними AMR управляється з одного рівня планування без спеціальної роботи з інтеграції. Для складів, що вже використовують систему управління складом (СУС) із підтримкою VDA5050, інтеграція досягається без розробки власного API. Розгортання на власних серверах підтримується для об'єктів із суворими вимогами до захисту даних або архітектурами закритої мережі.
Панель моніторингу в реальному часі нижче відображає 26 одиниць T600, розподілених по п'яти поверхах будівлі, кожна з яких звітує про рівень заряду акумулятора, поточний статус завдання та позицію на плані приміщення — все видно одночасно з єдиного інтерфейсу керування.
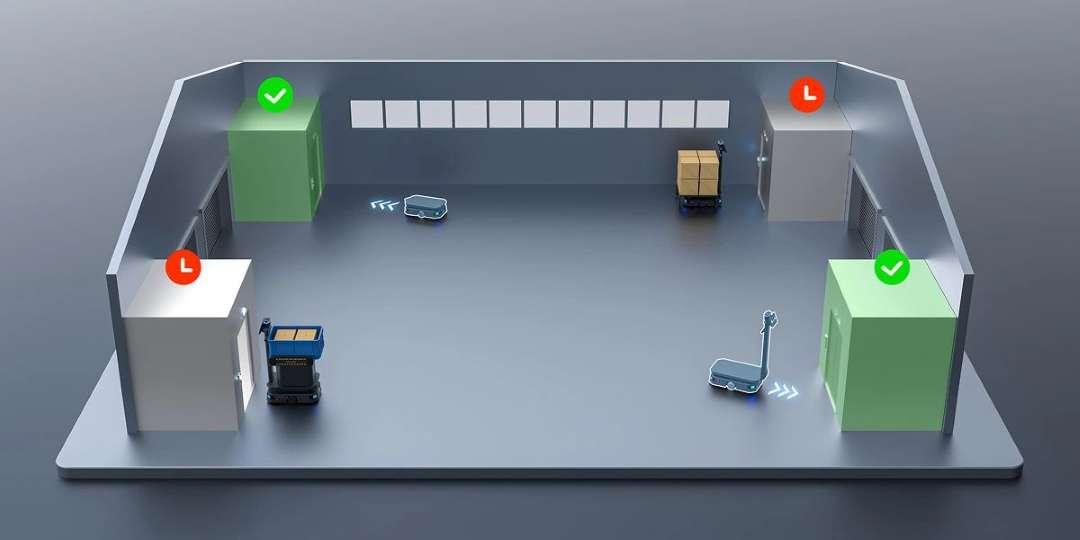
Інтеграція IoT з ліфтами: автономна доставка між поверхами
Транспортування вантажів між поверхами в багатоповерхових об'єктах є традиційно найскладнішим робочим процесом для автоматизації: це вимагає від робота взаємодії з інфраструктурою будівлі, а не лише навігації на рівні підлоги. T600 вирішує це через пряму інтеграцію IoT із системами керування ліфтами: робот зв'язується з системою ліфта для виклику вільної кабіни, навігує до неї, вибирає цільовий поверх та виходить по прибутті без жодної людської допомоги на будь-якому етапі. Алгоритм пріоритетного планування вільних ліфтів відстежує всі кабіни ліфтів у реальному часі та вибирає незайняту, мінімізуючи час очікування в пікові години та запобігаючи конфліктам ресурсів, коли кілька роботів претендують на один і той самий ліфт.
Карта диспетчеризації об'єкта нижче ілюструє логіку пріоритету вільних ліфтів: зелені індикатори позначають доступні кабіни, що призначаються роботам, які наближаються, тоді як червоні індикатори показують зайняті кабіни, які рівень планування обходить стороною.
Масштабне розгортання: з'єднання WiFi та архітектура на власних серверах
Корпоративні інсталяції з десятками одиниць T600 на великому об'єкті вимагають архітектури зв'язку та управління, що залишається надійною при масштабуванні. Система підтримує розгортання на власних серверах: вся логіка планування, карти об'єкта та телеметрія флоту залишаються в межах власної мережевої інфраструктури об'єкта, не пересилаючись через публічні хмарні сервіси. Це критично важливо для виробничих середовищ із суворими вимогами до захисту інтелектуальної власності або для об'єктів у районах із нестабільним зовнішнім з'єднанням. Мобільний застосунок PUDU Link забезпечує призначення завдань, моніторинг стану флоту та управління сповіщеннями з будь-якої точки в зоні покриття WiFi об'єкта.
Панорамна візуалізація нижче представляє масштабне мультироботне промислове розгортання з одиницями T600 та іншими AMR, підключеними через єдину WiFi-мережу, що ілюструє масштаб логістичної автоматизації, яким єдиний рівень управління може керувати без ручного нагляду за кожним роботом.

Цілодобова робота: акумулятор, режими заряджання та планування автономії
T600 оснащений літій-іонним акумулятором 30 А·год, розрахованим на промислові цикли глибокого розряду. Без навантаження час роботи досягає 12 годин; при максимальному навантаженні 600 кг — 6 годин, достатньо для повної стандартної зміни при повній вантажопідйомності. Для тризмінних об'єктів цикл швидкого заряджання за 2 години (від 0 % до 90 %) уможливлює стратегію підзарядки між змінами з мінімальним простоєм. Для справді безперервної цілодобової роботи паралельно доступні два варіанти: автоматичне заряджання в доці (робот самостійно навігує до зарядної станції при зниженні заряду нижче порогу) та гаряча заміна акумулятора, що дозволяє встановити новий акумулятор приблизно за 60 секунд при збереженні живлення робота (якщо увімкнено в Розширених налаштуваннях).
- Літій-іонний акумулятор 30 А·год — без ефекту пам'яті, розрахований на промислові цикли глибокого розряду
- Автоматичне заряджання в доці: робот самостійно навігує до зарядної стійки при низькому заряді
- Гаряча заміна акумулятора: 60-секундна заміна зі збереженням живлення (Розширені налаштування)
- Зберігання акумулятора: зарядити до 30–50 % перед зберіганням понад 15 днів
- Діапазон робочих температур: від 0 °C до 40 °C; короткострокове зберігання до 60 °C
Технічні характеристики PUDU T600
Механіка
| Розміри — версія Standard | 960 × 500 × 1350 мм |
|---|---|
| Розміри — версія Underride | 845 × 500 × 255 мм |
| Маса — версія Standard | 112 кг (246,92 фунти) |
| Маса — версія Underride | 94 кг (207,23 фунти) |
| Максимальна вантажопідйомність | 600 кг (1 322,77 фунти) |
| Макс. висота подоланої перешкоди | 10 мм (0,39 дюйма) |
| Макс. зазор, що долається | 35 мм (1,38 дюйма) |
| Мінімальна прохідність — Standard | 70 см (27,6 дюйма) |
| Мінімальна прохідність — Underride | 65 см (25,6 дюйма) |
Живлення та електрика
| Робоча напруга | DC 20,8 В ~ 29,2 В |
|---|---|
| Ємність акумулятора | 30 А·год |
| Час заряджання | Прибл. 2 год (від 0 % до 90 %) |
| Час роботи від акумулятора — без навантаження | 12 год |
| Час роботи від акумулятора — макс. навантаження | 6 год |
Навігація та рухливість
| Метод навігації — Standard | Visual-SLAM + Laser-SLAM (VSLAM + LiDAR SLAM) |
|---|---|
| Метод навігації — Underride | Лише Laser-SLAM (LiDAR SLAM) |
| Крейсерська швидкість | 0,2–1,2 м/с (регульована) |
Середовище та інтерфейс
| Робоча температура | 0 °C ~ 40 °C |
|---|---|
| Робоча висота над рівнем моря | < 2 000 м (6 561,68 фут.) |
| Робоча поверхня | Суха, рівна поверхня в приміщенні |
| Сенсорний екран (лише Standard) | РК-дисплей 10,1 дюйма |
| Протокол зв'язку флоту | VDA5050 |
| Інтеграції IoT | Керування ліфтами, керування електронними воротами, система пейджера, застосунок PUDU Link |
| Розгортання сервера | На власному сервері (локальний сервер / приватна хмара) |
Як запустити та налаштувати PUDU T600
Покрокова інструкція з первинного увімкнення, налаштування гальма, конфігурації розмірів, призначення завдань та процедури аварійної зупинки для PUDU T600, на основі офіційного посібника з експлуатації V1.1.1.
Крок 1: Увімкнення живлення
Утримуйте кнопку живлення натиснутою приблизно 3 секунди, поки індикаторні вогні шасі не засвітяться синім кольором. У версії Standard РК-дисплей 10,1 дюйма ініціалізується та відобразить головний інтерфейс. Перевірте, що жодна кнопка аварійної зупинки не активована, перш ніж продовжити.
Крок 2: Встановити перемикач гальма в робочу позицію
Переконайтеся, що перемикач гальма знаходиться в позиції ON (—) для нормальної автономної роботи. Позиція OFF роз'єднує ведучі колеса для ручного переміщення — використовуйте цей режим лише для перепозиціонування, а не для завдань доставки. Виконання автономного завдання з перемикачем гальма в позиції OFF унеможливить відповідь робота на команди навігації.
Крок 3: Налаштувати фізичні розміри робота
Якщо до шасі прикріплені будь-які конструкції — вантажні підставки, монтажні кронштейни або спеціальні кріплення — перейдіть до Налаштування > Функції Робота > Налаштування Роботи та оновіть параметри Заднього Виступу (X: 0–400 мм) та Повної Ширини (Y: 500–1 200 мм) відповідно до фактичної встановленої конфігурації. Правильні розмірні параметри гарантують, що система навігації та уникнення зіткнень використовує коректні фізичні межі для планування маршруту.
Крок 4: Призначити завдання доставки
Використовуйте вбудований сенсорний дисплей 10,1 дюйма (версія Standard) для вибору пункту призначення на карті об'єкта, або призначте завдання дистанційно через мобільний застосунок PUDU Link або підключену систему управління складом через інтерфейс протоколу VDA5050. Підтвердіть призначення; робот розпочне автономне планування маршруту та навігацію до цільового місця розташування.
Крок 5: Аварійна зупинка та відновлення роботи
У будь-якій аварійній ситуації натисніть червону кнопку аварійної зупинки у верхній частині блоку для негайної зупинки всього руху. Щоб відновити роботу, поверніть кнопку аварійної зупинки за годинниковою стрілкою для її вивільнення, потім підтвердіть усунення аварійного стану через екранний інтерфейс або застосунок PUDU Link перед повторним призначенням будь-яких навігаційних завдань.
Яка максимальна вантажопідйомність PUDU T600?
PUDU T600 перевозить максимум 600 кг (1 322,77 фунти) за один рейс. Ця вантажопідйомність однакова для версій Standard та Underride. При максимальному навантаженні час роботи акумулятора складає 6 годин; без навантаження — 12 годин. Робот живиться від літій-іонного акумулятора 30 А·год із робочою напругою постійного струму від 20,8 В до 29,2 В.
У чому різниця між версіями Standard та Underride PUDU T600?
Версія Standard має висоту 1 350 мм і включає РК-сенсорний дисплей 10,1 дюйма, ергономічну ручку з підсилювачем зусилля, проєктор безпеки на підлозі та подвійну навігацію VSLAM + LiDAR SLAM. Вона важить 112 кг. Версія Underride має висоту 255 мм — достатньо, щоб рухатися під складськими стелажами — використовує лише LiDAR SLAM і важить 94 кг. Обидві мають вантажопідйомність 600 кг, акумулятор 30 А·год, 12 год роботи без навантаження та підтримку протоколу VDA5050. Проєктор безпеки та підсилювач ручки — виключно у версії Standard.
Чи може PUDU T600 самостійно використовувати ліфти для доставки між поверхами?
Так. T600 безпосередньо інтегрується з системами керування ліфтами будівлі через IoT. Алгоритм пріоритетного планування вільних ліфтів відстежує всі кабіни в реальному часі, вибирає найдоступнішу, навігує роботом до неї, активує вибір цільового поверху та виходить по прибутті без жодної людської допомоги. Кілька одиниць T600 спільно використовують ресурси ліфтів через рівень планування, що запобігає конфліктам черги в пікові години доставки.
Чи інтегрується PUDU T600 з існуючими системами управління складом?
Так. T600 підтримує стандартний протокол зв'язку VDA5050 — галузевий стандартний інтерфейс для управління флотом AGV та AMR. Будь-яка СУС або диспетчер флоту, сумісний із VDA5050, може інтегрувати T600 без розробки власного API. Розгортання на власному сервері підтримується для об'єктів, що вимагають повністю закритої внутрішньої мережі без залежності від зовнішніх хмарних сервісів.
Скільки часу займає заряджання акумулятора PUDU T600?
")










")







")
")

")