
- Stock: In Stock
- Product code: 10040-000071
- Weight Brutto: 95.00kg
The PUDU BellaBot is an indoor autonomous delivery robot engineered for restaurants, hotels, and commercial service environments, combining laser and visual integrated SLAM positioning with a cat-inspired design that received the Good Design Award 2022. Four smart trays carry up to 10 kg each, a hot-swappable 25.6 Ah battery delivers 12 to 24 hours of continuous service, and a triple RGBD depth camera array detects obstacles at up to 5400 times per minute — all in a 55 kg, 1290 mm tall chassis built from aviation-grade aluminium alloy.
| Battery Life | 12–24 h (hot-swappable 25.6 Ah pack) |
|---|---|
| Tray Payload | 10 kg/layer × 4 trays |
| Navigation System | Laser + Visual Integrated SLAM |
| Obstacle Detection Frequency | Up to 5400 times/min |
The image below shows the BellaBot in its award-winning cat-inspired form, reflected in a mirror to highlight the four tray levels, animated LCD face, and the characteristic cat-ear head module that earned it a Good Design Award 2022 distinction.

Good Design Award 2022: Hospitality Technology That Guests Remember
Design in a service robot is not cosmetic — it determines whether guests engage with the machine or keep their distance. BellaBot was built around that insight. The cat-inspired silhouette, the animated 10.1-inch LCD face cycling through dozens of original expressions, and the soft-glow LED strips running along each tray edge combine into a visual identity that feels welcoming in a dining room rather than industrial. The shell is moulded from ABS reinforced with an aviation-grade aluminium alloy chassis, keeping the total weight at 55 kg while providing the structural rigidity needed for multi-shift commercial use across a rated service life of 5 years.
Six distinct operational modes are built in: Delivery, Cruise, Direct Delivery, Birthday, Special, and Guiding. A restaurant's needs shift throughout the day — table service at lunch, promotional cruising during happy hour, guest escorting at dinner. One robot adapts to every scenario without reprogramming, simply by selecting a mode on the on-board Android touchscreen.
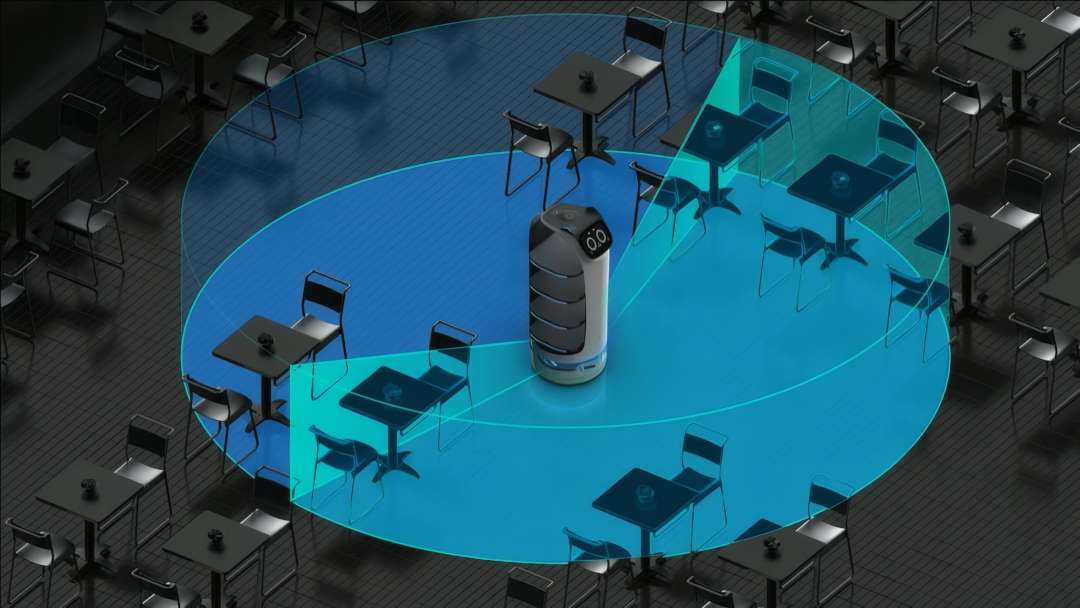
Dual SLAM Navigation: The Robot That Never Gets Lost
Navigation reliability separates a useful deployment from an expensive experiment. BellaBot uses laser and visual integrated SLAM positioning — two independent localisation methods running simultaneously. The LiDAR component generates a 360° environmental map with centimetre-level precision; the visual component anchors the robot to ceiling-mounted AR Markers for absolute position correction. In practice, this means BellaBot maintains accurate positioning even when furniture is rearranged, partial obstructions block line-of-sight to Markers, or ambient lighting shifts between service periods. The image below illustrates BellaBot's 360° LiDAR scanning radius as it navigates a fully occupied restaurant floor.
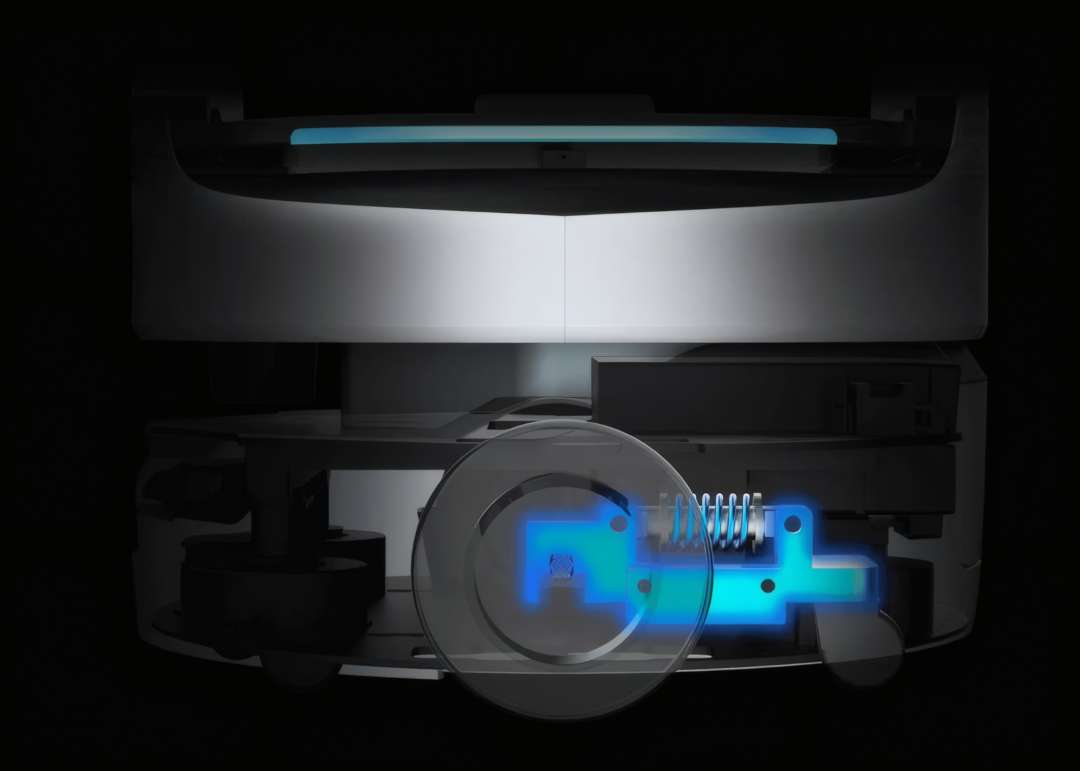
Advanced Suspension: Smooth Passage Over Real-World Floors
Restaurant and hotel floors are rarely perfectly flat. Transitions between tile and carpet, expansion joints, and uneven grout lines create micro-obstacles that destabilise rigid-chassis robots, causing tray oscillation and spilled dishes. BellaBot's chassis incorporates a dedicated spring-damper suspension in the drive wheel assembly, absorbing vertical displacement continuously up to 10 mm. Dishes stay level; liquid-filled glasses remain upright. The cross-section view below reveals the spring coil and damper geometry embedded within the drive module.
Three-Layer Safety Detection for a Crowded Dining Room
Triple RGBD Camera Array: 0.5-Second Response Time
The most hazardous obstacles in a restaurant are not furniture — they are moving human legs, children below sensor height, and items left on the floor unexpectedly. BellaBot counters this with three front-facing RGBD depth vision cameras in the lower chassis ring, delivering what PUDU describes as the strongest 3D perception available in its class. The robot can accurately detect an obstacle and initiate a full stop with a response time of just 0.5 seconds. The image below shows the three RGBD apertures mounted in the blue accent ring at the base of the head module.

Detection Frequency: Up to 5400 Scans per Minute
Detection frequency determines how quickly the robot reacts to dynamic obstacles — a guest pushing back a chair, a waiter crossing its path. BellaBot's sensor stack achieves a refresh rate of up to 5400 times per minute, producing a new environmental scan approximately every 11 milliseconds. The infographic below shows this figure alongside the directional scanning cone projected in front of the robot.

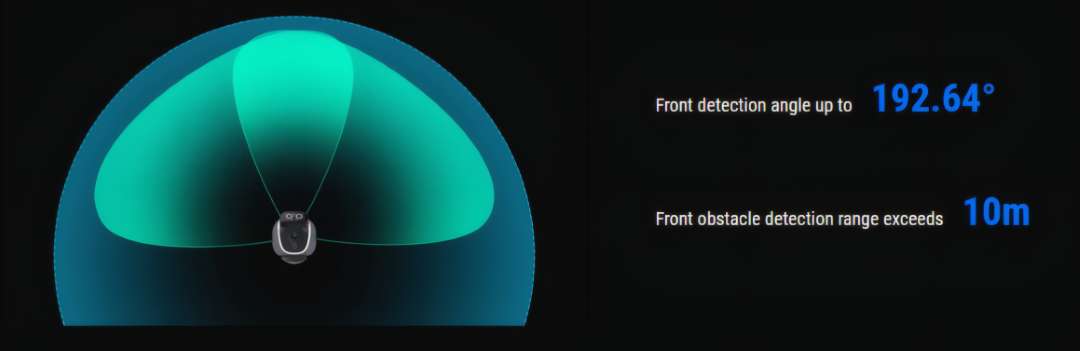
Detection Arc and Range: 192.64° at Over 10 Metres
Coverage geometry is as important as refresh rate. BellaBot's front detection arc spans 192.64° — wider than the robot's own footprint — with a detection range exceeding 10 m. This means BellaBot begins planning an avoidance trajectory well before an obstacle enters the minimum stopping distance, producing the smooth path corrections that characterise well-deployed service robots. The diagram below illustrates the full sensor coverage hemisphere.
Multimodal Human-Robot Interaction
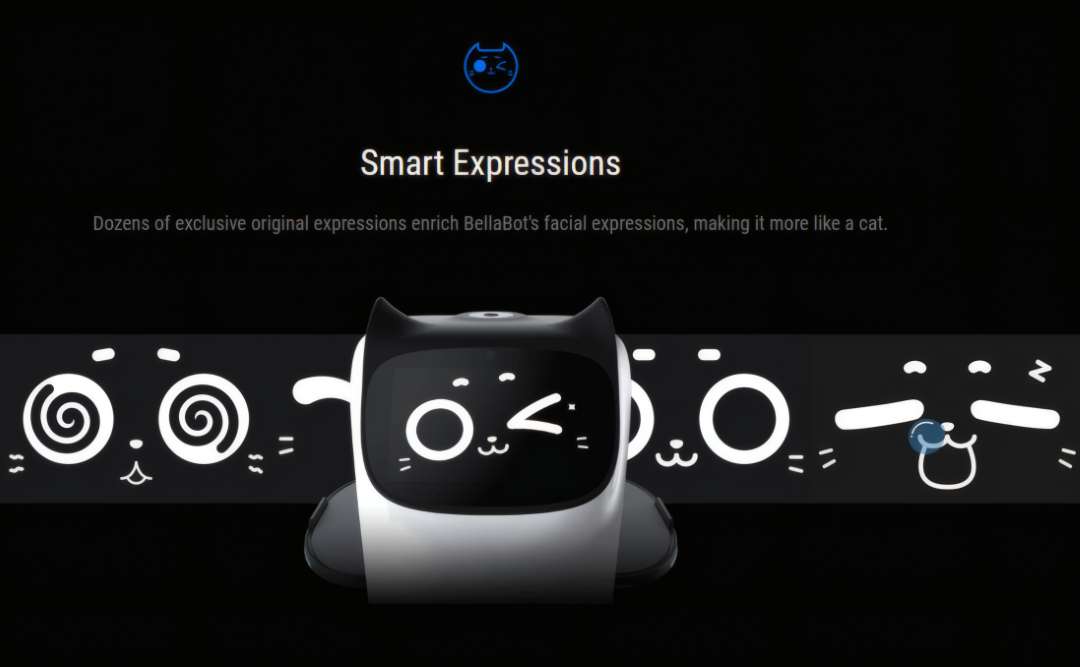
Smart Facial Expressions: Dozens of Original Animations
Guests respond differently to a robot that appears to have a personality. BellaBot's 10.1-inch LCD runs a library of dozens of exclusive original facial expressions — alert, happy, curious, sleepy, and several degrees of annoyance — activating contextually based on operational state, touch inputs, and task completion. The expression strip below demonstrates the breadth of the animation library, from wide-eyed alertness to winking cat-eye contentment.
Haptic Feedback: A Touch the Robot Feels
Each ear and the top surface of BellaBot's head incorporates a haptic feedback touch sensor. A single stroke triggers a friendly response; repeated touches escalate through increasingly enthusiastic reactions; too many rapid touches produce a mild expression of displeasure. This loop creates a memorable moment for guests — particularly families with children — turning each delivery into a brief positive interaction for the venue. The image below shows the haptic sensor layout with active glow zones on the head module.

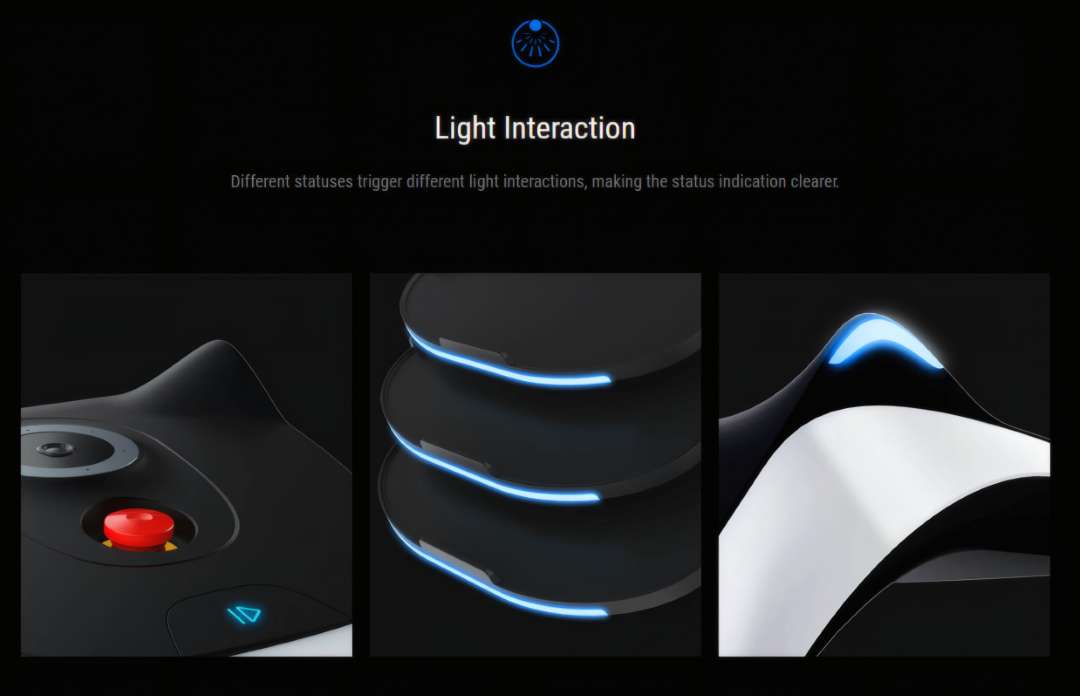
Light Interaction: Status Communicated Without Words
BellaBot's second-generation LED light strips run along every tray edge and the base ring, cycling through distinct patterns to signal operational status — tray ready, task active, charging, or error — without requiring staff or guests to read a screen. The tray-level LEDs highlight exactly which tray a guest should collect from, eliminating confusion during multi-destination deliveries. The three-panel image below captures the emergency module, tray edge illumination, and the cat-ear contour across different states.
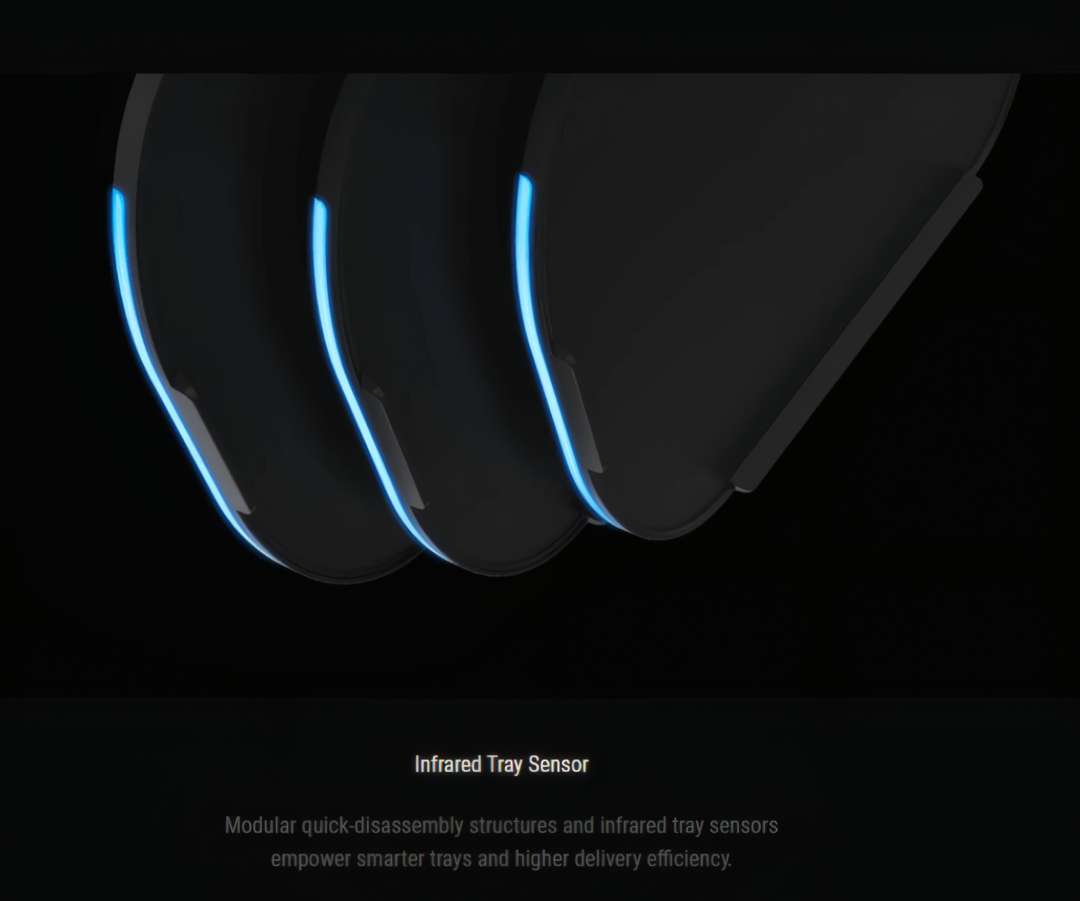
Intelligent Trays with Infrared Sensors
Each of BellaBot's four trays integrates an infrared presence sensor that detects whether the tray is loaded or empty. When a tray is cleared, the sensor signals the robot — with Tray Sensor Switch enabled, BellaBot automatically ends the current table task and moves to the next assignment 5 seconds after the last dish is removed, with no staff input required. The modular quick-disassembly structure means field replacement of a tray unit takes seconds. Each tray measures 410 mm × 510 mm and carries up to 10 kg. The image below shows the glowing infrared sensor arcs embedded in the tray rim.
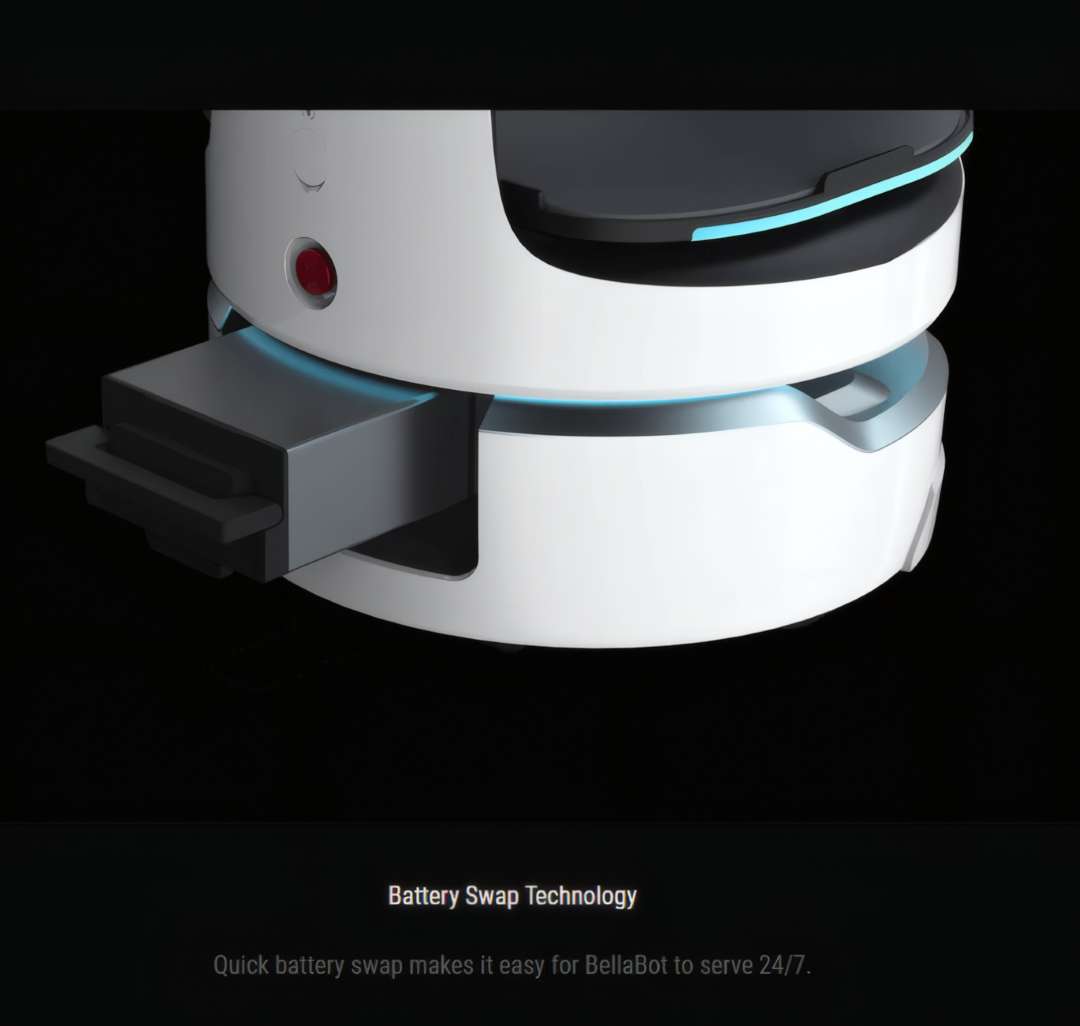
Swappable Battery: 12 to 24 Hours of Uninterrupted Service
Conventional service robots require a 4–5 hour charging pause per shift. BellaBot eliminates that constraint with a hot-swap battery design. The 25.6 Ah lithium pack slides out from the base unit in seconds, allowing a pre-charged replacement to be inserted and service to resume immediately. Under typical mixed-activity conditions, runtime spans 12 to 24 hours, covering both full-day and evening shifts. Recharging the depleted pack takes 4.5 hours at 29.4 V / 8 A. The image below shows the extraction mechanism with the battery pack partially ejected.
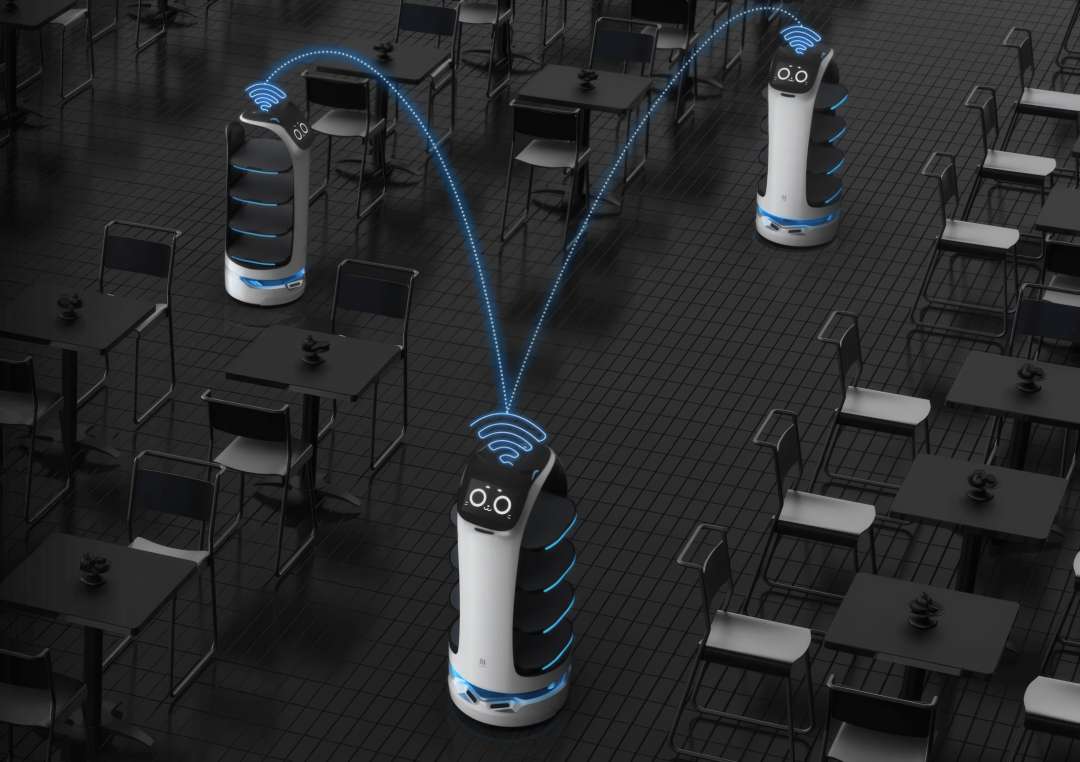
Multi-Robot Fleet Intelligence
A single BellaBot transforms a dining room. A coordinated fleet transforms an operation. Multiple units share positioning and task data over WiFi, enabling intelligent docking management: each robot selects the nearest available pickup station automatically, and if all stations are occupied during a rush, units wait at temporary holding positions and move to a station the moment one frees up — preventing kitchen pass congestion during peak service. The diagram below shows three BellaBot units exchanging coordination signals across a restaurant floor.
Technical Specifications of the PUDU BellaBot
The multi-angle design collage below provides a visual reference for the BellaBot hardware layout — front profile, top-down head view, rear three-quarter, and the full tray stack silhouette — before the complete specification tables.
Mechanical Dimensions
| Robot Dimensions (L × W × H) | 565 mm × 537 mm × 1290 mm |
|---|---|
| Robot Weight | 55 kg |
| Machine Material | ABS + aviation-grade aluminium alloy |
| IP Rating | IP20 |
| Service Life | 5 years |
Power & Battery
| Operating Voltage | DC 23–29.4 V |
|---|---|
| Power Input | AC 100–240 V, 50/60 Hz |
| Power Output (Charger) | 29.4 V, 8 A |
| Battery Capacity | 25.6 Ah (hot-swappable) |
| Charging Time | 4.5 h |
| Battery Life | 12–24 h |
Navigation & Mobility
| Navigation System | Laser and visual integrated SLAM positioning |
|---|---|
| Cruise Speed | 0.2–1.2 m/s (adjustable) |
| Minimum Travel Width | 70 cm |
| Minimum Turning Width | 65 cm |
| Maximum Surmountable Height | 10 mm |
| Maximum Climbing Angle | 5° |
| Surface Requirement | Indoor, flat and smooth ground |
Trays & Payload
| Number of Trays | 4 |
|---|---|
| Tray Dimensions | 410 mm × 510 mm |
| Tray Load | 10 kg/layer |
| Height Between Trays (top to bottom) | 230 mm / 200 mm / 200 mm / 180 mm |
| Tray Sensors | Infrared presence sensors (modular quick-disassembly) |
Sensors & Perception
| LiDAR | 360° horizontal scanning (new-generation) |
|---|---|
| Depth Vision Cameras | 3 × RGBD (Intel-quality depth sensors) |
| Front Detection Angle | Up to 192.64° |
| Front Obstacle Detection Range | > 10 m |
| Obstacle Detection Frequency | Up to 5400 times/min |
| RGBD Response Time | 0.5 s |
| Vision Sensor (Positioning) | Yes — top-mounted Marker camera |
Display & Audio
| Screen Size | 10.1-inch LCD |
|---|---|
| Operating System | Android |
| Microphone | 6-mic circular array |
| Speakers | 2 × 10 W stereo |
| Facial Expressions | Dozens of original animated expressions |
| Haptic Feedback | Yes — head and ear touch sensors |
| LED Light Interaction | Yes — second-generation interactive LED strips |
| Voice Wake-Up | "Bella, Bella" voice wake word |
Operating Modes
| Delivery Mode | Multi-table simultaneous delivery with optimal route planning |
|---|---|
| Cruise Mode | Autonomous patrol along predetermined route with voice promotion |
| Direct Delivery Mode | One-way single-destination delivery without return to pickup |
| Birthday Mode | Delivery with customisable birthday music and dot-matrix message |
| Special Mode | Custom music and voice for proposals, celebrations, and special events |
| Guiding Mode | Guest greeting and table escort with auto-return to greeting point |
Environmental Conditions
| Working Temperature | 0–40 °C |
|---|---|
| Storage Temperature | -40–65 °C |
| Working Humidity | RH ≤ 85% |
| Maximum Working Altitude | < 2000 m |
What's in the Box
- PUDU BellaBot delivery robot × 1
- Charger (29.4 V / 8 A) × 1
- BellaBot User Manual × 1
- Quality Certificate × 1
- Positioning Sticker × 1
- Power Key × 1
- AR Markers × 1 set
How to Power On and Start Your First Delivery with BellaBot
This procedure describes how to start up the PUDU BellaBot and execute an initial table delivery using Delivery Mode. Ensure that the deployment map has been configured and AR Markers are installed at the venue before following these steps.
Step 1: Insert the Battery and Activate the Key Switch
Open the rear battery box cover, insert the 25.6 Ah hot-swap battery pack, and turn the key switch to the ON position. Close the cover securely. The key switch must be ON before the power button will respond.
Step 2: Position the Robot at the Startup Location
For visual SLAM or combined Laser+Visual SLAM navigation, move BellaBot directly beneath the first AR Marker, facing the main service direction. For laser-only SLAM, place the robot at the designated startup point on the configured map.
Step 3: Power On
Press and hold the power switch for 1 second. The bottom LED light strip will flash and the screen will display the boot logo, followed by the startup animation and Android desktop. The Pudu App launches automatically. If it does not appear, tap the Pudu App icon on the desktop.
Step 4: Select Delivery Mode
From the Pudu App main interface, tap the menu bar and select Delivery Mode. The delivery screen displays the tray map and table number grid. Tap the Settings icon to adjust column count or enable multi-voice prompts before starting.
Step 5: Load Trays and Assign Table Numbers
Place dishes on the appropriate trays — up to 10 kg per tray. On the screen, tap each tray to assign a destination table number. The robot automatically calculates the most efficient multi-stop route.
Step 6: Tap Start! and Monitor the Delivery
Tap Start! BellaBot navigates to each table in sequence. On arrival, the correct tray's LED illuminates and a voice prompt plays. After the guest collects the dish, tap Done or the lightning button — or enable Tray Sensor Switch for fully automatic progression after 5 seconds. BellaBot returns to the pickup location once all deliveries are complete.
How long does BellaBot's battery last, and can it be swapped without stopping service?
BellaBot's 25.6 Ah lithium battery delivers 12 to 24 hours of operational autonomy under typical mixed-use conditions. The hot-swap design allows the depleted pack to be removed and a pre-charged replacement inserted in seconds, sustaining continuous service across a full double-shift without any downtime.
How does BellaBot avoid guests, chairs, and other obstacles?
BellaBot uses three complementary detection layers: a 360° LiDAR that continuously maps the environment, three front-facing RGBD depth cameras with a 192.64° detection arc and range exceeding 10 m, and an obstacle detection refresh rate of up to 5400 times per minute. This delivers a 0.5-second stop response to dynamic obstacles such as guests standing suddenly or chairs being pushed back.
What delivery modes does BellaBot support beyond standard table service?
Six modes are available: Delivery (multi-table optimised routing), Cruise (autonomous patrol with voice promotion), Direct Delivery (one-way single destination), Birthday (custom music and dot-matrix message), Special (music for proposals or celebrations), and Guiding (greeting guests at the entrance and escorting them to their table).
Can several BellaBot units operate simultaneously in one venue?
Yes. BellaBot supports multi-robot fleet coordination over WiFi. Units share docking availability data in real time so each robot selects the nearest free pickup station automatically. During peak service, robots queue intelligently at temporary holding positions rather than causing congestion at the kitchen pass.
What floor types and corridor widths does BellaBot require?
BellaBot operates on flat, smooth indoor floors. Its suspension system handles surface irregularities up to 10 mm and ramp angles up to 5°. A minimum corridor width of 70 cm is needed for straight travel and 65 cm for turns. It is not suitable for outdoor use, wet surfaces, or sticky floor coatings.
Why Choose EXPERT3D?
EXPERT3D has specialised in advanced robotics and 3D technology since 2012 — over a decade of hands-on experience selecting, deploying, and supporting professional platforms across the hospitality sector, retail, healthcare, and research institutions. As an official representative of PUDU, we guarantee the best price, authorized service, and official warranty. We provide pre-sales technical consultation, venue site assessment for navigation mapping, delivery coordination across Spain and Europe, and post-sale support backed by direct manufacturer contacts. BellaBot deployment involves map configuration, fleet integration, and staff training: our team guides you through every step for a smooth launch. Contact us to discuss your venue's specific requirements and current availability.














