



- Stock: In Stock
- Product code: 00-00013724
- Weight Brutto: 35.00kg
The Unitree G1 Edu Flagship B-U4 is a full-size humanoid research robot built for universities, R&D laboratories, and advanced robotics programs, featuring 43 degrees of freedom, a dexterous Dex3-1 hand system with 33 tactile sensors per hand, and an NVIDIA Jetson Orin module delivering 100 TOPS of on-board AI compute — all housed in a chassis that folds from 1320 mm to 690 mm for transport.
| Total Degrees of Freedom | 43 |
|---|---|
| AI Compute Module | NVIDIA Jetson Orin, 100 TOPS |
| Smart Battery | 9000 mAh, ~2 h runtime |
| Max Knee Joint Torque | 120 N.m |
Motion Architecture: What 43 Degrees of Freedom Actually Means
Most humanoid robots compromise either on range of motion or on torque. The G1 Edu Flagship B-U4 does neither. Each leg carries 6 DOF, the waist contributes 3 DOF, and each arm adds 7 DOF — giving the platform a kinematic envelope that closely mirrors human biomechanics. The knee joint sustains up to 120 N.m of torque, enough to support dynamic recovery from a stumble or to hold a static squat under load.
Every joint uses low-inertia, high-speed inner-rotor PMSM motors (permanent magnet synchronous) paired with industrial-grade crossed roller bearings. The dual-encoder configuration on each joint reduces positional error and gives the control loop the sub-millisecond feedback it needs for stable dynamic locomotion. The result: the robot can self-recover from falls, navigate uneven terrain, and — under the right training regime — execute acrobatic maneuvers.
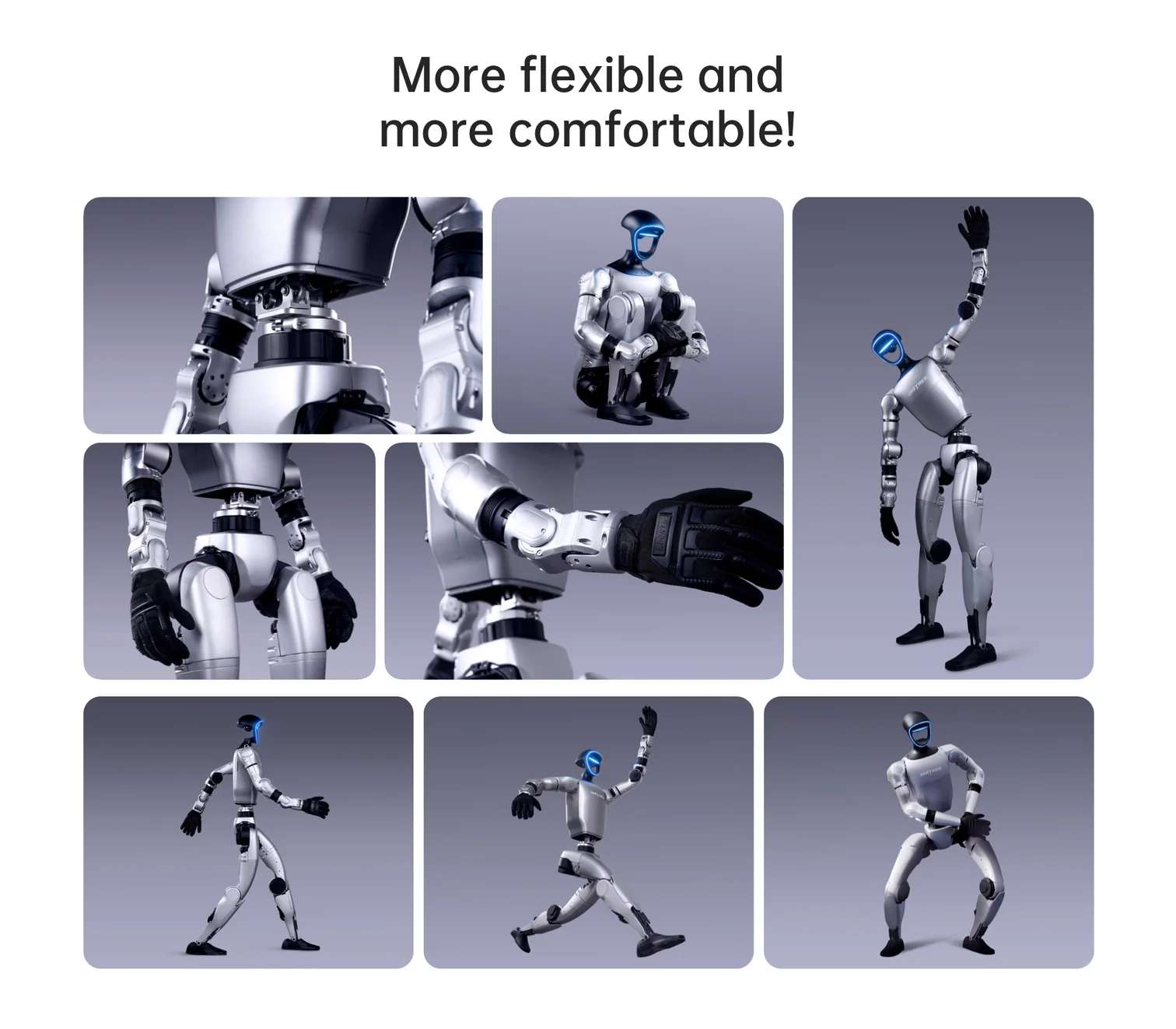
The image below captures the G1's full range of motion in action — from an upright walking stance to a low squat — illustrating the practical reach of its 43-DOF kinematic envelope.
Joint Motion Space at a Glance
The angular ranges available at each articulation are what separate research-grade hardware from commercial cobots. The waist alone spans Z±155° in yaw, giving the upper body rotation comparable to a seated human turn. Hip yaw reaches Y±158° and knee flexion runs from 0° to 165° — sufficient for a full kneel.
Embodied AI: UnifoLM and On-Board Learning
At the computational core sits Unitree's Unified Large-Scale Robot Model (UnifoLM), running on the Jetson Orin's 100 TOPS neural processing pipeline. This architecture supports imitation learning and reinforcement learning directly on the robot — no external server required for inference. The platform can adapt its gait and manipulation strategy to novel objects and environments in real time, making it a genuine testbed for embodied AI research rather than a remote-controlled demonstrator.
The sensor suite backs up that compute: a depth camera handles close-range spatial mapping while a 3D LiDAR provides long-range obstacle awareness. A 4-microphone array and 5 W speaker support voice command pipelines and human-robot dialogue experiments.
Dex3-1 Dexterous Hands: Fine Motor Research Platform
The B-U4 edition ships with two Dex3-1 three-finger dexterous hands, each embedding 33 tactile sensors distributed across the fingertip and palm surface. Hybrid force-position control lets the hand switch fluidly between compliant grasping and rigid positioning. Each arm can lift up to ~3 kg with a span of approximately 0.45 M.
The photograph below shows the Dex3-1 hand making precision contact with a small object — illustrating the fingertip tactile resolution that enables force-controlled manipulation tasks.

This architecture supports research in prosthetics-inspired manipulation, tool use, garment handling, and any application where a purely rigid gripper would damage the work object. Force sensing also enables contact detection for safer human-robot physical interaction (pHRI) experiments.
Portable Form Factor: Field Research Without a Van
Standing height is 1320 × 450 × 200 mm; folded, the robot collapses to 690 × 450 × 300 mm. At approximately 35 kg with battery, a two-person team can load it into a standard vehicle without lifting equipment. This makes outdoor locomotion studies, terrain traversal benchmarks, and multi-site experiments practically feasible — not just theoretically possible.
Tech Tip: Before transporting the G1 in folded configuration, ensure the protective support is engaged and all joint brakes are set via the remote controller. The 9000 mAh quick-release battery should be removed for flights per IATA lithium-ion regulations. On arrival, use the OTA system to verify firmware is current before the first session — Unitree pushes stability updates regularly.
Development Ecosystem: Open Platform for Secondary Research
The G1 Edu Flagship B-U4 supports secondary development via published SDK and complete development manuals. The 8-core CPU handles real-time motion control while the Jetson Orin handles perception and AI workloads in parallel. WiFi 6 and Bluetooth 5.2 connectivity allow tethered and wireless data exchange with ROS/ROS2 workstations. The Enhanced Smart OTA system enables remote firmware updates — essential for institutions running multiple units across facilities.
Full hollow electrical wiring through every joint means cable management does not constrain range of motion, a practical necessity for any configuration that requires the robot to reach behind itself or cross the midline.
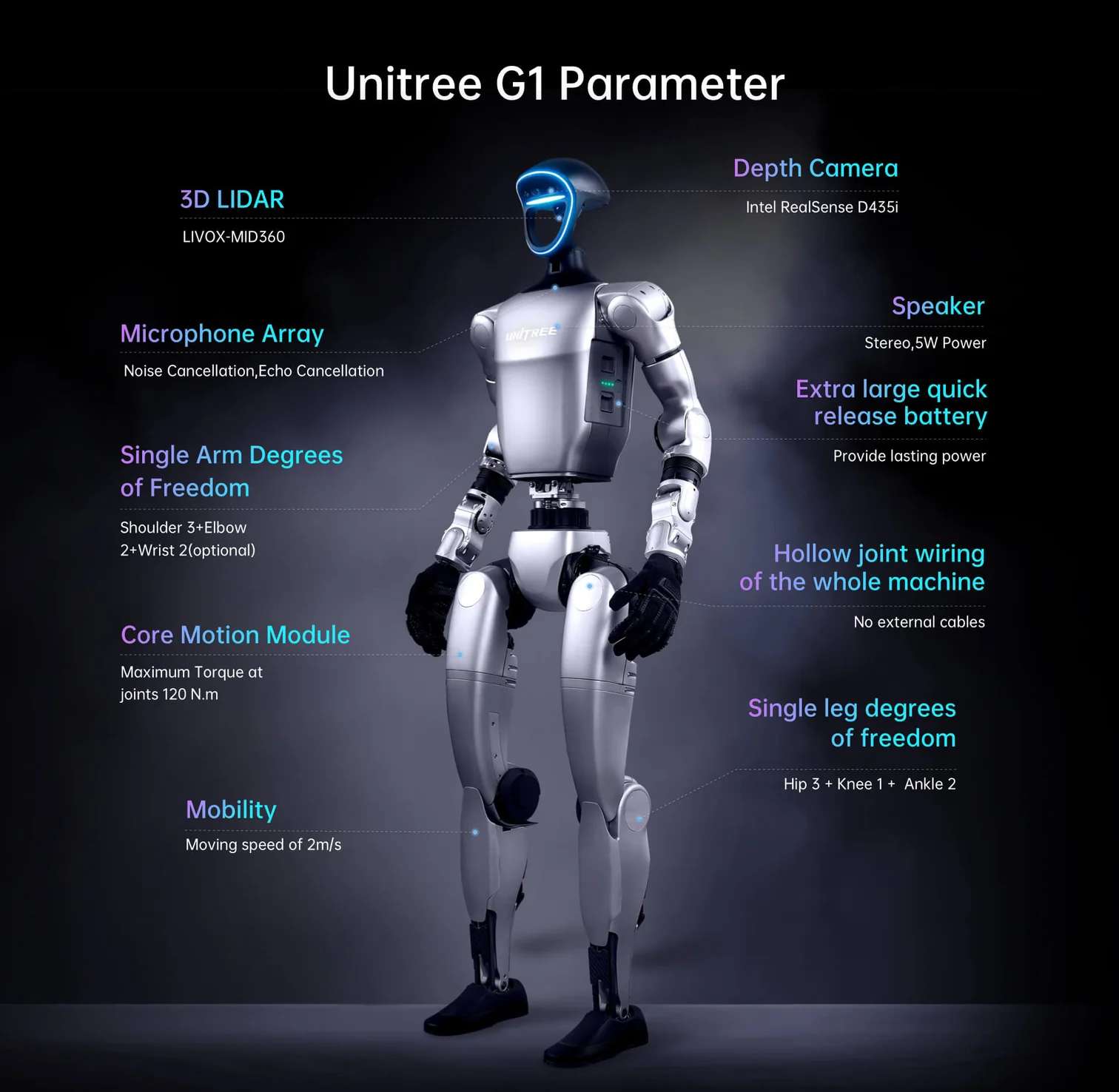
The technical overview image below provides a labelled view of the G1's main subsystems — chassis proportions, joint placement, and sensor housing — useful as a reference when planning integration tasks.
Technical Specifications of the Unitree G1 Edu Flagship B-U4 Humanoid Robot
Physical Dimensions
| Model | G1 Edu Flagship B-U4 |
|---|---|
| Height × Width × Depth (Standing) | 1320 × 450 × 200 mm |
| Height × Width × Depth (Folded) | 690 × 450 × 300 mm |
| Weight (with battery) | ~35 kg |
| Calf + Thigh Length | 0.6 M |
| Arm Span | ~0.45 M |
Degrees of Freedom
| Total Degrees of Freedom | 43 |
|---|---|
| DOF per Leg | 6 |
| Waist DOF | 3 |
| DOF per Arm | 7 |
| DOF per Hand | 2 × Dex3-1 3-finger dexterous hands with force control (33 tactile sensors per hand) |
Joint Specifications
| Joint Output Bearing | Industrial-grade crossed roller bearings (high precision, high load capacity) |
|---|---|
| Joint Motor | Low-inertia high-speed inner rotor PMSM (permanent magnet synchronous motor) |
| Maximum Knee Joint Torque | 120 N.m |
| Maximum Arm Load | ~3 kg |
| Full Hollow Electrical Wiring in Joints | Yes |
| Joint Encoding | Dual encoder |
| Cooling System | Local air cooling |
Joint Motion Space
| Waist Joint Range | Z±155°, X±45°, Y±30° |
|---|---|
| Knee Joint Range | 0~165° |
| Hip Joint Range | P±154°, R-30~+170°, Y±158° |
| Wrist Joint Range | P±92.5°, Y±92.5° |
Computing and Intelligence
| Basic Computing Power | 8-core high-performance CPU |
|---|---|
| High-Performance AI Module | NVIDIA Jetson Orin, 100 TOPS |
Sensing and Connectivity
| Detection Sensor | Depth Camera + 3D LiDAR |
|---|---|
| Microphone | 4-microphone array |
| Speaker | 5 W |
| Wireless Connectivity | WiFi 6, Bluetooth 5.2 |
Power System
| Power Source | 13-string lithium battery |
|---|---|
| Smart Battery Capacity | 9000 mAh (Quick Release) |
| Charger | 54 V 5 A |
| Battery Life | ~2 h |
Development and Support
| Manual Remote Controller | Yes |
|---|---|
| Enhanced Smart OTA | Yes |
| Secondary Development | Yes |
| Protective Support | Yes |
| Warranty | 12 months |
| Technical Support | Yes — complete development manuals and ecosystem support included |
Why Choose EXPERT3D?
EXPERT3D has been a specialist in 3D technology and advanced robotics since 2012. Our team provides personalised pre-purchase consultation to match the right hardware to your research objectives, hands-on support throughout the acquisition process, and dedicated technical assistance after delivery. We stock the full Unitree G1 ecosystem and can advise on integration with ROS2 environments, compute cluster connections, and lab safety configurations. Trust over a decade of applied expertise to support your investment.















