



- Stock: In Stock
- Product code: 00-00013726
- Weight Brutto: 35.00kg
The Unitree G1 Edu Flagship D-U6 is a humanoid research robot with 41 degrees of freedom, engineered for embodied artificial intelligence development and advanced locomotion algorithm research. Built around an NVIDIA Jetson Orin module delivering 100 TOPS of inference power and five-finger dexterous hands with 17 tactile sensors each, it transforms university laboratories and industrial R&D facilities into high-capability robotic experimentation platforms.
| Key specifications | |
|---|---|
| Total degrees of freedom | 41 DOF |
| Computing power | NVIDIA Jetson Orin 100 TOPS |
| Maximum knee torque | 120 N·m |
| Battery runtime | approximately 2 h |
Bio-inspired locomotion and unrestricted range of motion
Conventional industrial robots operate within rigid, pre-defined workspaces. The Unitree G1 takes a fundamentally different approach. Each joint integrates industrial-grade crossed roller bearings and high-speed, low-inertia internal-rotor permanent magnet synchronous motors (PMSM) — a combination that maximises response speed while minimising rotational inertia. The practical result: the platform can rise from a supine position, execute back flips, and traverse uneven terrain with a kinematic fluidity that mirrors human motor patterns.
The image below shows the Unitree G1 Edu Flagship D-U6 performing a full dynamic manoeuvre sequence under laboratory conditions, demonstrating its complete range of motion.
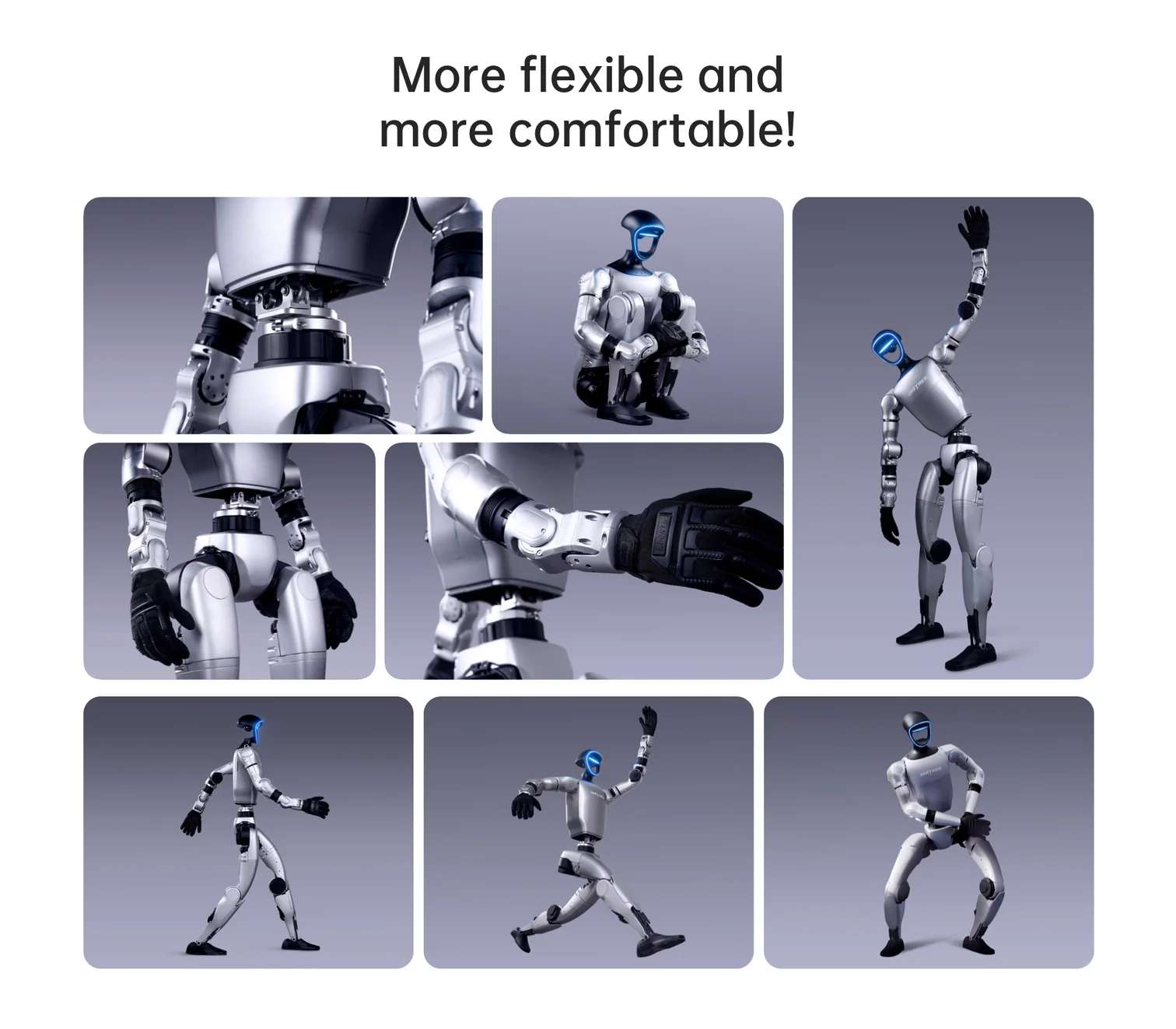
The three-axis waist (Z±155°, X±45°, Y±30°) combined with 6 DOF per leg delivers superior dynamic stability during postural transitions. The 7 degrees of freedom per arm expand the operational workspace beyond what standard 6-axis configurations allow. The maximum knee torque of 120 N·m ensures sufficient structural support for low-load postures such as deep squats or crouching positions in object-retrieval tasks.
On-board AI intelligence and autonomous learning
The eight-core high-performance CPU works in parallel with the NVIDIA Jetson Orin module, delivering 100 TOPS of inference throughput. This dual computing architecture supports the UnifoLM (Unitree Robot Unified Large Model), enabling imitation learning and reinforcement learning to run directly on the robot's hardware. No external infrastructure is required for training cycles; the platform learns and adapts in the operational environment itself.
The integrated depth camera and 3D LiDAR provide full spatial perception — a prerequisite for autonomous navigation in unstructured environments. Firmware updates are distributed wirelessly via smart OTA, ensuring the software ecosystem continues evolving without disrupting ongoing research projects. WiFi 6 and Bluetooth 5.2 connectivity guarantee low-latency data transfers across both local networks and teleoperation setups.
Five-finger dexterous manipulation with tactile feedback
The Inspire RH56DFTP hands included in the D-U6 configuration represent one of the most significant differentiators from lower-tier humanoid platforms. Each hand features 17 tactile sensors distributed across the fingertips and palm, enabling hybrid force-position control: the system detects precisely how much pressure is applied at each contact point and adjusts the finger actuators accordingly.
The image below shows the Inspire hands of the Unitree G1 D-U6 executing a precision manipulation task with active force control applied to an object with irregular geometry.

This tactile feedback capability opens direct research pathways in service robotics, haptic teleoperation and automated assembly, where grasp delicacy is a critical experimental variable. The maximum payload per arm of approximately 3 kg covers the majority of everyday objects and light tools used in laboratory manipulation scenarios.
Compact architecture for inter-facility mobility
A research robot that cannot be relocated easily between laboratories loses practical value. The Unitree G1 Edu Flagship D-U6 addresses this through an integrated folding mechanism that reduces its operational footprint from 1320 × 450 × 200 mm to a transport profile of 690 × 450 × 300 mm, compatible with a standard vehicle boot. Total weight including the battery is approximately 35 kg, manageable by two people.
All electrical wiring is routed through the hollow interior channel of each joint, eliminating external harnesses and reducing friction-induced wear during extended test cycles — a design choice that directly extends the long-term reliability of the system.
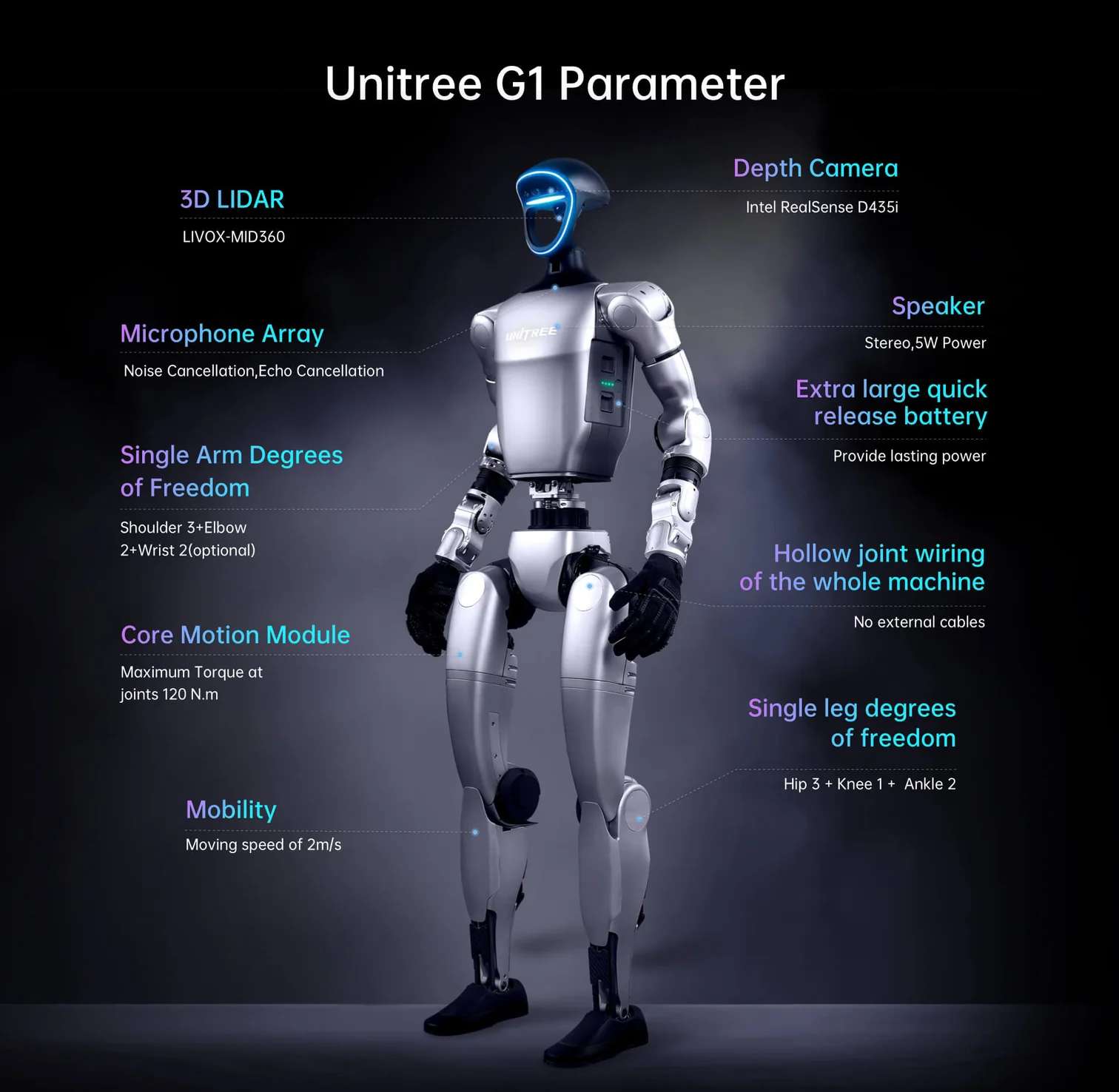
The image below offers a detailed view of the internal hardware architecture of the Unitree G1 D-U6, showing the joint layout and main actuator disposition.
Technical specifications of the Unitree G1 Edu Flagship D-U6
Dimensions and weight
| Dimensions (standing) | 1320 × 450 × 200 mm |
|---|---|
| Dimensions (folded) | 690 × 450 × 300 mm |
| Weight (with battery) | approximately 35 kg |
Degrees of freedom
| Total DOF | 41 |
|---|---|
| DOF per leg | 6 |
| Waist DOF | 3 (Z±155°, X±45°, Y±30°) |
| DOF per arm | 7 |
Hands and manipulators
| Hand configuration | 2 dexterous 5-finger hands (Inspire RH56DFTP-2R, RH56DFTP-2L) |
|---|---|
| Tactile sensors per hand | 17 |
| Maximum arm payload | approximately 3 kg |
| Arm length (calf + thigh) | 0.6 m |
| Arm span | approximately 0.45 m |
Joints and actuators
| Joint bearings | Industrial-grade crossed roller bearings (high precision, high load capacity) |
|---|---|
| Joint motors | High-speed, low-inertia internal-rotor PMSM |
| Maximum knee torque | 120 N·m |
| Knee joint range | 0~165° |
| Hip joint range | P±154°, R-30~+170°, Y±158° |
Computing and perception
| Computing power | 8-core high-performance CPU + NVIDIA Jetson Orin 100 TOPS |
|---|---|
| Perception sensors | Depth camera + 3D LiDAR |
Battery and connectivity
| Battery | Smart quick-release lithium, 9000 mAh (13 cells/string) |
|---|---|
| Battery runtime | approximately 2 h |
| Wireless connectivity | WiFi 6, Bluetooth 5.2 |
Audio, cooling and development
| Audio system | 4-microphone array + 5 W speaker |
|---|---|
| Cooling system | Local air cooling |
| Development support | Secondary development compatible, smart OTA updates |
| Warranty | 12 months |
What's in the box
- Unitree G1 Edu Flagship D-U6 humanoid robot with integrated battery
- Right dexterous hand Inspire RH56DFTP-2R
- Left dexterous hand Inspire RH56DFTP-2L
- Manual remote control
- Protective stand
Why choose EXPERT3D?
With expertise built since 2012 in advanced robotics and additive manufacturing, the EXPERT3D team provides specialised technical consultancy for research groups, universities and industrial R&D facilities across Spain and Europe. We deliver qualified support before, during and after purchase to ensure every robotic platform performs to its full potential from day one. Contact our engineers to assess how the Unitree G1 Edu Flagship D-U6 aligns with your current research programme. Prices in €.















