



- Stock: In Stock
- Product code: G1-COMP-EDU
- Weight Brutto: 68.00kg
The Unitree G1-Comp EDU is a full-size bipedal humanoid robot engineered specifically for competitive robotics and advanced university research, standing approximately 130 cm tall and weighing around 35 kg. With 37 degrees of freedom, a maximum joint torque of 120 N.m, integrated Dex3-1 force-controlled dexterous hands, and a dedicated NVIDIA Jetson Orin NX development module delivering 100 TOPS of AI inference, the G1-Comp EDU sets a new benchmark for deployable humanoid platforms.
| Total Degrees of Freedom | 37 (G1-Comp EDU configuration) |
|---|---|
| Maximum Knee Torque | 120 N.m |
| AI Computing Module | NVIDIA Jetson Orin NX — 100 TOPS |
| Battery Life | ~2 h (9000 mAh, quick-release) |
The image below captures the G1-Comp in its natural competitive environment — a full-size football pitch — demonstrating the stable gait and purposeful motion that earned it the label "Football Icon Designed for Competitions."

Competition-Built Body: 130 cm, 35 kg, Ready to Move
At 1320 × 450 × 200 mm (standing) and foldable to 690 × 450 × 300 mm for transport, the G1-Comp EDU occupies the physical envelope of a small adult human. Weighing approximately 35 kg with battery, the frame achieves a strong power-to-weight ratio thanks to an all-electric drivetrain. No hydraulics, no pneumatics — every joint is driven by Unitree's proprietary hollow-shaft motor, and all wiring runs internally through the hollow joint structure, eliminating external cable snag points entirely.
The dual-view below confirms the standing and folded dimensions that make the G1-Comp straightforward to transport between competition venues and research laboratories.

37 Degrees of Freedom: Human-Like Movement Architecture
Humanoid mobility is only as credible as its kinematic architecture. The G1-Comp EDU ships with 37 total degrees of freedom — the base platform contributes 25 to 45 configurable DoF across legs, waist, arms, and head, while the bundled Dex3-1 three-finger dexterous hands add 7 DoF per hand plus 2 optional wrist DoF per arm. Each leg articulates across 6 DoF (Hip 3 + Knee 1 + Ankle 2), giving the robot the hip roll, yaw, and pitch range needed for agile bipedal walking, side-stepping, and recovery from external disturbances.
Extra-Large Joint Range of Motion
Compared to many academic humanoid platforms, the G1-Comp offers an unusually wide angular envelope. The waist rolls on Z±155°, X±45°, Y±30°; the knee flexes from 0° to 165°; hip pitch spans ±154°. These ranges allow crouching, reaching, and dynamic weight-shifting manoeuvres that constrained-DoF robots simply cannot execute. The shell, visible below, is constructed from aluminium alloy reinforced with high-strength engineering plastics — a combination that absorbs impact loads in competition without contributing unnecessary mass to the kinematic chain.
Dual-Encoder Precision on Every Joint
Position accuracy under load is a persistent challenge for high-DoF humanoids. The G1-Comp addresses this with a dual-encoder system on every joint — one encoder on the motor rotor, a second on the output shaft. This redundant feedback loop delivers accurate and stable joint states even when external interference or mechanical backlash would degrade single-encoder performance. The result: reliable Sim2Real policy transfer, where behaviour trained in Isaac Gym or MuJoCo executes predictably on the physical robot.

Locomotion Performance: 2 m/s Bipedal Gait
The G1-Comp's onboard motion control stack delivers a peak locomotion speed of 2 m/s — fast enough to compete in standardised RoboCup soccer match formats. The industry-leading motion controller is purpose-built for competitive match environments, maintaining gait stability under ball-contact perturbations and lateral crowding from opposing robots.
Super-Stable Balance Control
In practice, balance control determines whether a match robot stays upright or ends up on the turf. The G1-Comp's control system absorbs unexpected pushes and uneven surface variations without breaking gait continuity. The frame below shows the robot mid-stride with its centre of mass correctly projected over the support polygon — the hallmark of a well-tuned whole-body controller.

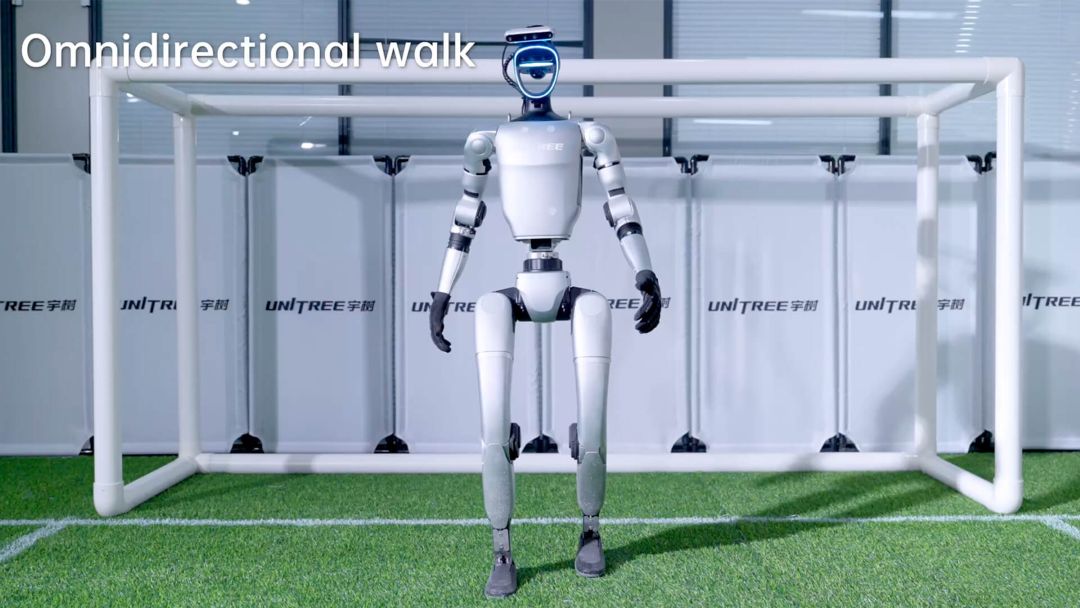
Omnidirectional Walk
Beyond straight-line locomotion, the G1-Comp supports omnidirectional walking — translating laterally, rotating in place, and changing heading without stopping. This capability is essential for goal-side repositioning in football and equally useful for inspection or manipulation tasks in research settings where obstacle-rich environments demand agile footprint management.
Dex3-1 Dexterous Hands: Force-Controlled Manipulation
Unlike many competition humanoids that ship with passive grippers, the G1-Comp EDU includes a pair of Dex3-1 three-finger dexterous hands as standard equipment. Each hand provides 7 active degrees of freedom: the thumb contributes 3 DoF; the index finger and middle finger each contribute 2 DoF. The force-sensing array spans a perception range of 10 g to 2500 g, enabling precise grasping of both delicate objects and standard competition equipment. Operating voltage is 12–58 V, drawing directly from the robot's power bus. An optional tactile sensor array upgrade is available for research workflows requiring skin-level contact feedback.
The portrait below shows the complete G1-Comp EDU system — note the distinctive helmet-mounted depth camera, the bimanual arm configuration, and the Dex3-1 gloved-appearance hands that give the platform its distinctly humanoid character.

NVIDIA Jetson Orin NX: 100 TOPS for On-Board AI
The dedicated development computing unit — an NVIDIA Jetson Orin NX — provides 100 TOPS of AI inference performance alongside an 8-core Arm Cortex-A78AE CPU clocked at up to 2 GHz, 16 GB of unified memory, and 1024 NVIDIA Ampere GPU cores. This is not a thin client offloading compute to the cloud; all inference, perception, and control decisions run on-board in real time. The operational computing unit handling low-level motor control runs a separate Unitree-proprietary stack that is not accessible to end users, preserving motion control integrity while leaving the full Jetson environment open for custom development.
Hardware Interface Configuration
The G1-Comp's right-side panel exposes a rich hardware interface for secondary development. The image below shows the full configuration: USB Type-C ports supporting USB 3.0 and USB 3.2 host modes with 5 V / 1.5 A power output, dual Gigabit Ethernet RJ45 ports for high-bandwidth sensor feeds, and multi-voltage power rails at 5 V, 12 V, 24 V, and 54.8 V. The depth camera system uses an Intel RealSense D455, combined with 2-DoF head rotation to achieve 180° field of view coverage. The 4-microphone array incorporates noise reduction and echo cancellation for reliable voice command reception even in noisy competition environments.

Open Development Ecosystem
Beyond raw compute, the G1-Comp EDU ships with a comprehensive software stack. The diagram below maps all six pillars of the development ecosystem: a multi-level API layer (high-level, low-level, DDS, audio/lighting); simulation environments in Isaac Gym and MuJoCo; multimodal interaction via the UnifoLM large language model with TTS and ASR support; ROS ecosystem compatibility; a mobile APP for rapid configuration; and the Jetson Orin NX as the development computing unit. ROS compatibility means existing lab code bases, sensor drivers, and visualisation pipelines port with minimal rework.

RoboCup SDK: Sim2Real from Training to Competition
The dedicated RoboCup SDK bridges the gap between policy training and match-day deployment. Three specialised API layers address every stage of a competition agent's pipeline. The Visual Recognition API exposes the built-in YOLO11 real-time object detection network, providing a rich stadium information interface that identifies ball position, goal orientation, teammate and opponent locations. The Spatial Positioning API combines monocular geometric positioning with binocular depth positioning for accurate metric pose estimates within the pitch. The Motion Control API translates high-level decision signals — derived from visual and positional inputs — into valid locomotion and manipulation commands.
Training itself is supported by the unitree_rl_gym reinforcement learning framework, which integrates Isaac Gym and MuJoCo for efficient physical simulation. Training parameters (number of parallel environments, random seed, maximum iterations) are fully configurable. The complete Sim2Sim → Sim2Real pipeline is documented and supported, enabling teams to iterate rapidly in simulation before deploying policies on the physical robot. The image below shows the G1-Comp executing a trained football-approach behaviour on an indoor test pitch — an entirely hardware-in-the-loop validation scenario.

Tech Tip: When transitioning a trained policy from Isaac Gym simulation to the physical G1-Comp, enable the sim-to-real domain randomisation presets for terrain friction (μ = 0.4–1.2) and motor delay (5–20 ms). These parameter ranges reflect the actual variability observed on artificial turf competition surfaces. Training without domain randomisation produces policies that degrade significantly on the first physical roll-out.
9000 mAh Smart Battery: ~2 Hours of Continuous Operation
The G1-Comp runs on a 9000 mAh, 13-string lithium battery that delivers approximately 2 hours of operational autonomy under typical mixed-activity conditions. Quick-release mechanics mean battery swaps take seconds rather than minutes — critical in tournament settings where turnaround time between matches is limited. The charger operates at 54 V / 5 A. Intelligent OTA firmware updates deploy over-the-air, keeping motion control and SDK components current without requiring physical connection to a laptop.
The graphic below illustrates the approximately 120-minute runtime figure along with the quick-change and fast-charging features included in the G1-Comp package.
Technical Specifications of the Unitree G1-Comp EDU
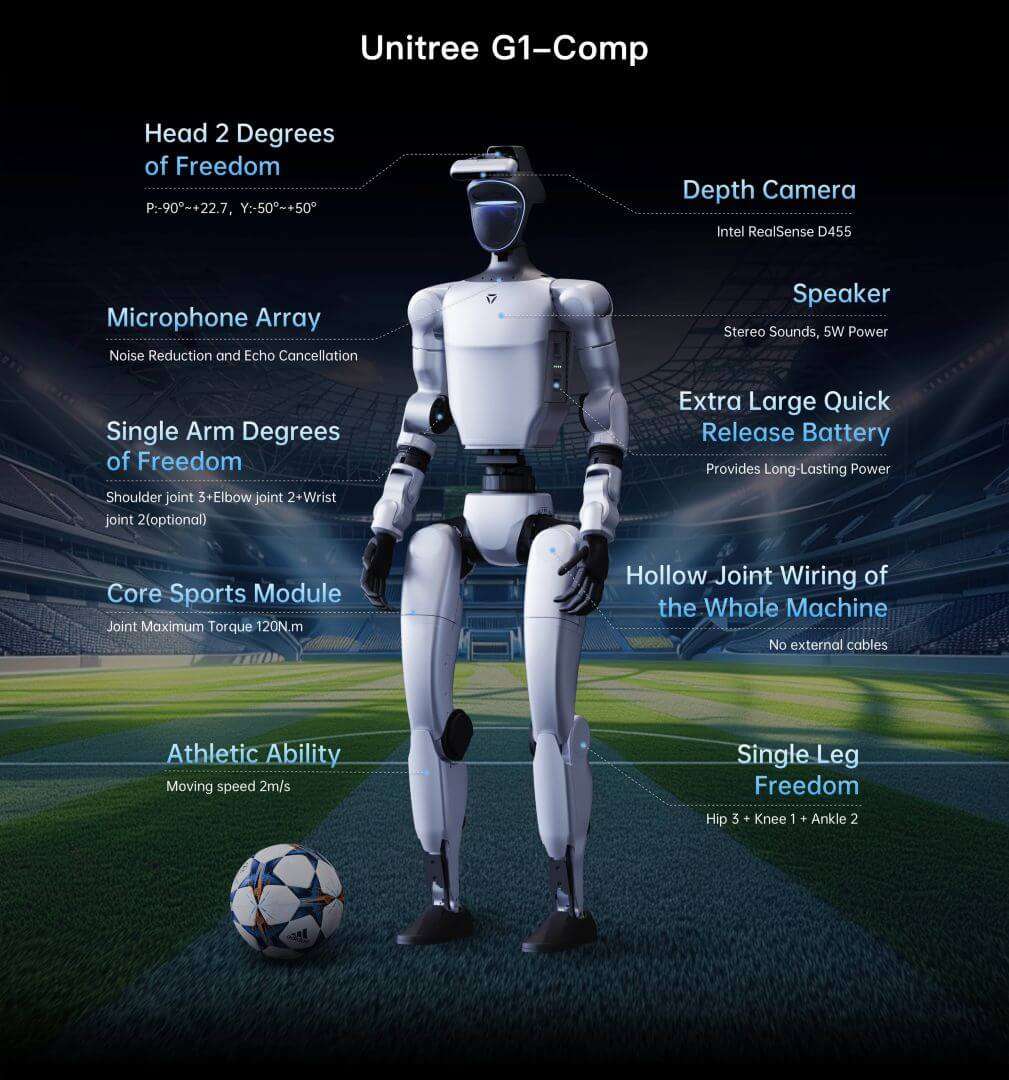
The annotated diagram below provides a visual reference for the key hardware components and their physical placement on the G1-Comp EDU platform before the full numerical specification tables.
Mechanical Dimensions
| Model | G1 Comp |
|---|---|
| Height × Width × Thickness (standing) | 1320 × 450 × 200 mm |
| Height × Width × Thickness (folded) | 690 × 450 × 300 mm |
| Weight (with battery) | ~35 kg+ |
| Shell Material | Aluminium alloy + high-strength engineering plastics |
| Calf + Thigh Length | 0.6 m |
| Arm Span | ~0.45 m |
Degrees of Freedom
| Total DoF — G1-Comp EDU configuration | 37 |
|---|---|
| Total DoF — base platform range | 25–45 (configurable) |
| Single Leg DoF | 6 (Hip 3 + Knee 1 + Ankle 2) |
| Waist DoF | 1 + optional 2 additional |
| Single Arm DoF | 5 (Shoulder 3 + Elbow 2) |
| Head DoF | 2 |
| Single Hand DoF — Dex3-1 (included) | 7 + optional 2 wrist DoF (Thumb 3 + Index 2 + Middle 2) |
Joint Performance
| Maximum Torque — Knee Joint | 120 N.m |
|---|---|
| Arm Maximum Load | ~3 kg |
| Maximum Locomotion Speed | 2 m/s |
| Joint Encoder Type | Dual encoder (rotor + output shaft) |
| Full Joint Hollow Electrical Routing | Yes — no external cables |
| Cooling System | Local air cooling |
Joint Movement Range
| Waist Joint Range | Z±155°, X±45°, Y±30° |
|---|---|
| Knee Joint Range | 0~165° |
| Hip Joint Range | P±154°, R-30~+170°, Y±158° |
| Wrist Joint Range | P±92.5°, Y±92.5° |
| Head Joint Range | P:-90°~+22.7°, Y:-50°~+50° |
Computing & AI
| Basic Computing Power | 8-core high-performance CPU |
|---|---|
| Development Computing Module | NVIDIA Jetson Orin NX |
| AI Performance | 100 TOPS |
| Jetson CPU | Arm Cortex-A78AE, 8 cores, up to 2 GHz |
| Jetson GPU | 1024 NVIDIA Ampere architecture CUDA cores |
| Jetson Memory | 16 GB unified memory |
Sensors & Perception
| Depth Camera | Intel RealSense D455 (180° FOV with head rotation) |
|---|---|
| 3D LiDAR | Yes — 360° horizontal FOV, 59° vertical |
| Microphone Array | 4-mic array with noise reduction and echo cancellation |
| Speaker | 5 W stereo |
Connectivity & Interfaces
| WiFi | WiFi 6 |
|---|---|
| Bluetooth | Bluetooth 5.2 |
| Wired Network | Gigabit Ethernet ×2 (RJ45) |
| USB Interfaces | USB 3.0 Type-C ×3, USB 3.2 / DP1.4 Type-C ×1 |
| Power Rails (developer-accessible) | 5 V, 12 V, 24 V, 54.8 V |
Power & Battery
| Power Supply | 13-string lithium battery |
|---|---|
| Smart Battery Capacity | 9000 mAh (quick-release) |
| Charger | 54 V / 5 A |
| Battery Life | ~2 h |
Dex3-1 Three-Finger Dexterous Hand
| Total DoF per Hand | 7 active (Thumb 3 + Index 2 + Middle 2) |
|---|---|
| Force Sensing Range | 10–2500 g |
| Operating Voltage | 12–58 V |
| Thumb Joint Angles | 0°~+100°, -35°~+60°, -60°~+60° |
| Index and Middle Finger Angles | 0°~+90°, 0°~+100° |
| Tactile Sensor Arrays | Optional — 9 array sensors per hand |
Software & Development
| Simulation Environments | Isaac Gym, MuJoCo |
|---|---|
| Reinforcement Learning Framework | unitree_rl_gym (Sim2Sim + Sim2Real) |
| Visual Recognition |
Recently viewed products

New
Brand: Unitree
Product code: G1-COMP-EDU
The Unitree G1-Comp EDU is a full-size bipedal humanoid robot
engineered specifically for competitive robotics and advanced university
research, s..
46 900€
Ex Tax:38 760€

New
Brand: Formlabs
Product code: 00-00001587
The Formlabs Fuse Series Printer Stand is a purpose-built
steel stand designed to position the Fuse 1 and Fuse 1+ 30W SLS printers at an
ergonomic..
361€
Ex Tax:298€


New
Brand: Unitree
Product code: G1-AIR
The Unitree G1 AIR is a compact, fully electric humanoid robot engineered for professional demonstrations, live events, and remote-operated showcases...
24 805€
Ex Tax:20 500€
Brand: Unitree
Product code: 00-00013727
The Unitree G1 Edu Standard-U1 is a compact humanoid robot engineered for advanced artificial intelligence research and educational robotics, featurin..
35 000€
Ex Tax:28 926€
Brand: Unitree
Product code: 00-00013725
The Unitree G1 Edu Flagship C-U5 is a full-scale humanoid robot engineered for advanced AI research, embodied intelligence, and real-world autonomous ..
69 900€
Ex Tax:57 769€
Brand: Unitree
Product code: 00-00013724
The Unitree G1 Edu Flagship B-U4 is a full-size humanoid research robot built for universities, R&D laboratories, and advanced robotics programs, ..
62 900€
Ex Tax:51 983€
Brand: Unitree
Product code: 00-00013722
The Unitree G1 Edu Advanced-U2 is a research-grade humanoid robot with 29 degrees of freedom built for universities, R&D laboratories, and advance..
41 900€
Ex Tax:34 628€
Brand: Unitree
Product code: 00-00013723
The Unitree G1 Edu Flagship A-U3 is a research humanoid robot designed for advanced robotics laboratories and embodied AI development, featuring 43 de..
53 900€
Ex Tax:44 545€
Brand: Unitree
Product code: 00-00013726
The Unitree G1 Edu Flagship D-U6 is a humanoid research robot with 41 degrees of freedom, engineered for embodied artificial intelligence development ..
69 000€
Ex Tax:57 025€
New
Brand: Unitree
Product code: RB-G1-U7-EDU
The UNITREE G1-U7 EDU is a full-size humanoid robot designed for academic research, industrial automation, and advanced AI development, standing 1,270..
64 900€
Ex Tax:53 636€
New
Brand: Unitree
Product code: G1-U8-EDU
The Unitree G1-U8 EDU is a full-scale humanoid robot designed for robotics research, advanced education, and industrial automation prototyping. Standi..
58 000€
Ex Tax:47 934€
New
Brand: Unitree
Product code: G1-U9-EDU
The UNITREE G1-U9 EDU is a full-scale humanoid research robot built for advanced academic and industrial applications, standing 1,320 mm tall and weig..
59 000€
Ex Tax:48 760€
New
Brand: Unitree
Product code: G1-U10-EDU
The Unitree G1-U10 EDU is a full-scale research humanoid robot engineered for AI-driven imitation learning, advanced manipulation research, and autono..
54 000€
Ex Tax:44 628€


New
Brand: Unitree
Product code: G1-D-Flagship
The Unitree G1-D Flagship is a wheeled humanoid service robot
engineered for sustained commercial deployment, combining dual
7 DoF arms, an adjust..
59 000€
Ex Tax:48 760€


Brand: Unitree
Product code: 00-00013716
Unlock the full potential of
integrated artificial intelligence with the
Unitree Go2 Edu Intelligent U2 Robotic Dog, a
cutting-edge quadruped pl..
17 500€
Ex Tax:14 463€
Brand: Unitree
Product code: 00-00013717
Unitree Go2 Intelligent Laser U3 Robotic Dog: The Future of AI Robotics
Unlock the full
potential of artificial intelligence with the Unitree Go..
18 900€
Ex Tax:15 620€
Brand: Unitree
Product code: 00-00013715
Discover the Unitree Go2 Edu Flagship U4 Robotic Dog
Unlock the full potential of integrated artificial intelligence with the
Unitree Go2 E..
20 495€
Ex Tax:16 938€

New
Brand: PUDU
Product code: 00-00014079
PUDU MT1 Max Autonomous AI Industrial Sweeping Robot
PUDU MT1 Max is a next-generation industrial cleaning robot designed to automate sweeping tasks ..
24 079€
Ex Tax:19 900€


New
Brand: PUDU
Product code: 00-00014081
PUDU CC1 Pro Intelligent AI Cleaning Robot
PUDU CC1 Pro is an advanced autonomous cleaning solution designed to handle full-cycle floor maintenance i..
24 200€
Ex Tax:20 000€

New
Brand: PUDU
Product code: 00-00014080
PUDU CC1 Black Pro Intelligent AI Cleaning Robot
PUDU CC1 Black Pro is an upgraded version of the CC1 series, designed for fully autonomous floor mai..
25 410€
Ex Tax:21 000€


New
Brand: PUDU
Product code: 00-00014083
PUDU BellaBot Pro (White) Smart Delivery & Advertising Robot
PUDU BellaBot Pro (White) is a modern autonomous service robot created for restauran..
13 310€
Ex Tax:11 000€


New
Brand: PUDU
Product code: 00-00014082
PUDU BellaBot Pro (Black) Smart Delivery & Advertising Robot
PUDU BellaBot Pro (Black) is a modern autonomous service robot created for restauran..
13 310€
Ex Tax:11 000€
New
Brand: Unitree
Product code: G1-AIR
The Unitree G1 AIR is a compact, fully electric humanoid robot engineered for professional demonstrations, live events, and remote-operated showcases...
24 805€
Ex Tax:20 500€
Brand: Unitree
Product code: 00-00013727
The Unitree G1 Edu Standard-U1 is a compact humanoid robot engineered for advanced artificial intelligence research and educational robotics, featurin..
35 000€
Ex Tax:28 926€
Brand: Unitree
Product code: 00-00013725
The Unitree G1 Edu Flagship C-U5 is a full-scale humanoid robot engineered for advanced AI research, embodied intelligence, and real-world autonomous ..
69 900€
Ex Tax:57 769€
Brand: Unitree
Product code: 00-00013724
The Unitree G1 Edu Flagship B-U4 is a full-size humanoid research robot built for universities, R&D laboratories, and advanced robotics programs, ..
62 900€
Ex Tax:51 983€
Brand: Unitree
Product code: 00-00013722
The Unitree G1 Edu Advanced-U2 is a research-grade humanoid robot with 29 degrees of freedom built for universities, R&D laboratories, and advance..
41 900€
Ex Tax:34 628€
Brand: Unitree
Product code: 00-00013723
The Unitree G1 Edu Flagship A-U3 is a research humanoid robot designed for advanced robotics laboratories and embodied AI development, featuring 43 de..
53 900€
Ex Tax:44 545€
Brand: Unitree
Product code: 00-00013726
The Unitree G1 Edu Flagship D-U6 is a humanoid research robot with 41 degrees of freedom, engineered for embodied artificial intelligence development ..
69 000€
Ex Tax:57 025€
New
Brand: Unitree
Product code: RB-G1-U7-EDU
The UNITREE G1-U7 EDU is a full-size humanoid robot designed for academic research, industrial automation, and advanced AI development, standing 1,270..
64 900€
Ex Tax:53 636€
New
Brand: Unitree
Product code: G1-U8-EDU
The Unitree G1-U8 EDU is a full-scale humanoid robot designed for robotics research, advanced education, and industrial automation prototyping. Standi..
58 000€
Ex Tax:47 934€
New
Brand: Unitree
Product code: G1-U9-EDU
The UNITREE G1-U9 EDU is a full-scale humanoid research robot built for advanced academic and industrial applications, standing 1,320 mm tall and weig..
59 000€
Ex Tax:48 760€
Don’t have an account yet?
|