



- Stock: In Stock
- Product code: 00-00013722
- Weight Brutto: 35.00kg
The Unitree G1 Edu Advanced-U2 is a research-grade humanoid robot with 29 degrees of freedom built for universities, R&D laboratories, and advanced robotics development teams. Powered by an onboard NVIDIA Jetson Orin 100 TOPS compute module and a 360° perception suite combining 3D LiDAR with a depth camera, it provides the physical platform needed to push the boundaries of embodied AI, reinforcement learning, and complex locomotion algorithm research.
| Total degrees of freedom | 29 DOF |
|---|---|
| Advanced compute module | NVIDIA Jetson Orin 100 TOPS |
| Peak knee torque | 120 N·m |
| Battery runtime | ~2 h (9000 mAh smart battery) |
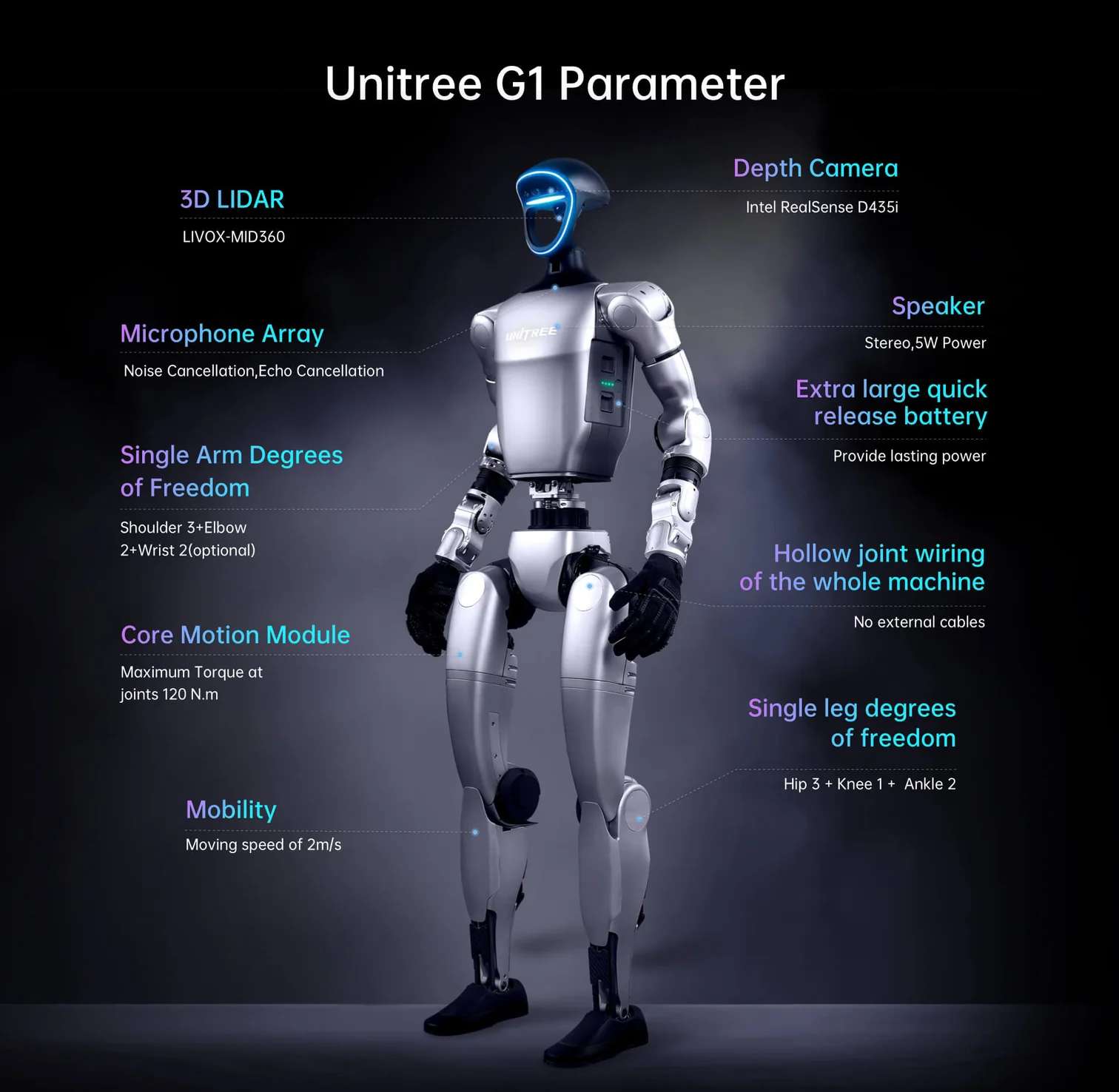
The image below shows the Unitree G1 Edu Advanced-U2 in its standing operating posture — 1320 mm tall, with each articulated limb segment visible at its actual scale and proportions.
Technical capabilities of the Unitree G1 Edu Advanced-U2
Adaptive learning with UnifoLM
At the core of the G1 Edu Advanced-U2 is the Unitree Unified Large Model (UnifoLM) — a foundation model that enables the robot to acquire new behaviours through two complementary training pathways. Reinforcement learning allows the agent to improve its policy by interacting with real-world environments, while imitation learning lets it replicate sequences demonstrated by a human operator. The net result: each lab session generates training data for the next, compressing the iteration cycle from days to hours.
29-DOF mobility and fall recovery
The mechanical architecture delivers 12 DOF in the legs (6 per limb), 14 DOF in the arms (7 per arm), and 3 DOF in the waist (pitch, roll, yaw) — faithfully replicating human joint ranges. Extra-large joint ranges — knee from 0° to 165°, hip pitch at ±154° — let the robot rise from a prone position, crouch to pick up low-lying objects, and fold down to a compact 690 × 450 × 300 mm transit form factor without disassembly.
- onboard fall-recovery algorithms for stable operation on uneven surfaces
- force-position hybrid control for human-like tactile sensitivity during manipulation tasks
- per-arm payload of ~3 kg, suited for light lab manipulation experiments
- folded format enables transport between labs or classrooms without specialist lifting equipment
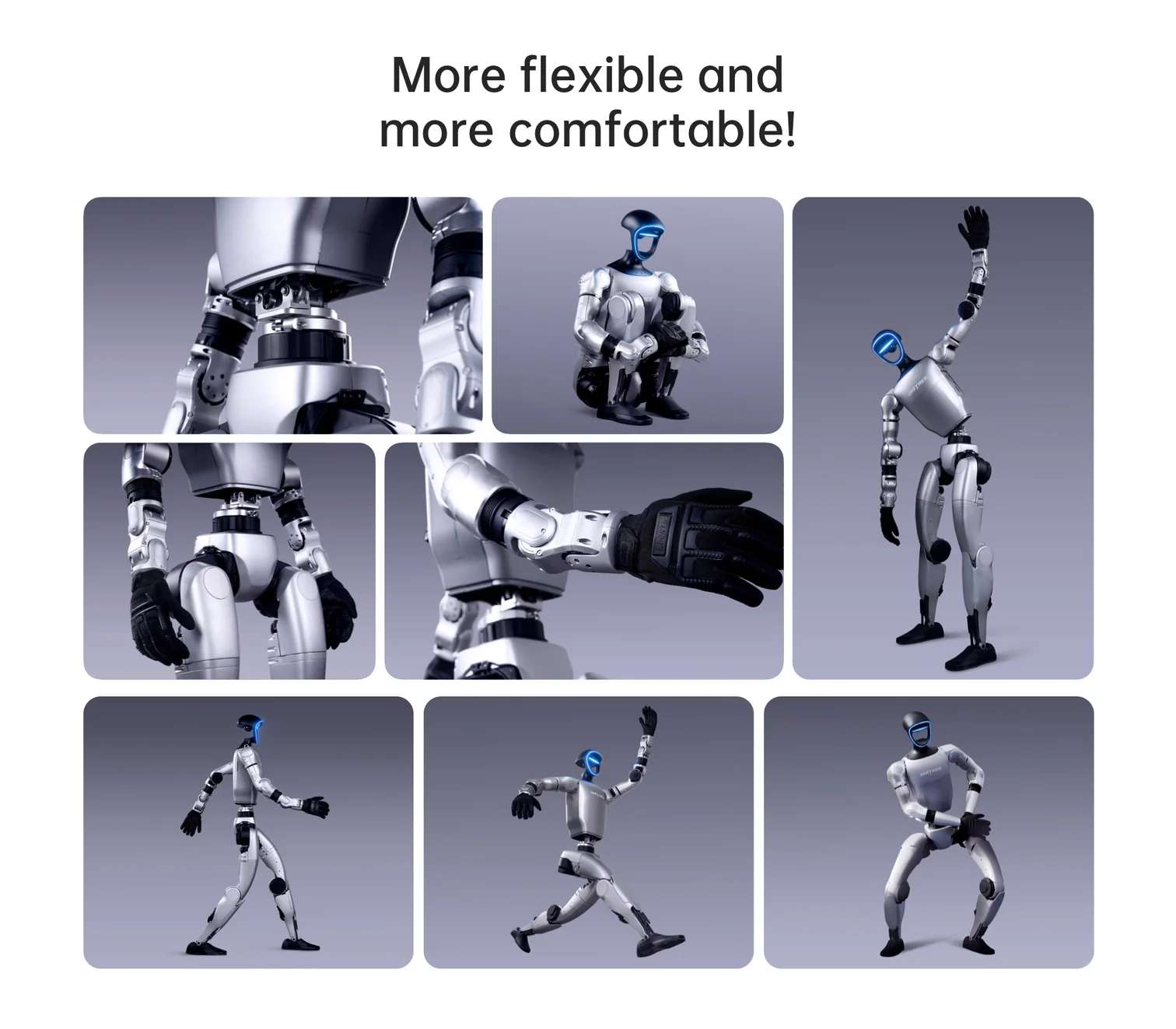
The following image captures the robot mid-demonstration, highlighting the joint range and dynamic balance achieved during advanced mobility tests.
Precision actuation: low-inertia PMSM motors
Every joint is driven by a high-speed, low-inertia inner-rotor PMSM motor mounted on industrial-grade cross-roller bearings. Cross-roller bearings distribute radial and axial loads simultaneously, which eliminates the backlash typical of single-row assemblies and keeps joint stiffness consistent across the full range of motion. Combined with force-position hybrid control, this hardware stack gives the robot the torque precision required for delicate manipulation experiments and safe physical human-robot interaction (pHRI) research.
360° perception and onboard AI compute
The robot's head integrates a 3D LiDAR and a depth camera to build a dense real-time map of its surroundings, enabling safe obstacle avoidance and environment-aware locomotion planning. Processing these sensor streams is handled by the onboard NVIDIA Jetson Orin delivering 100 TOPS of AI inference performance — enough to simultaneously run object detection, body-pose estimation, and local navigation models without offloading to an external server. A 4-microphone array and a 5 W speaker complete the interaction layer, while WiFi 6 and Bluetooth 5.2 cover low-latency communication with supervisory systems.
Tech Tip: When developing locomotion policies via reinforcement learning, start with a sim-to-real transfer pipeline using Unitree's official URDF model in Isaac Sim or MuJoCo. The full-joint hollow electrical wiring design allows you to route additional sensor cables — such as wrist force-torque sensors — through the arm segments without modifying the outer structure, keeping the robot's collision geometry identical between simulation and reality.
Technical specifications of the Unitree G1 Edu Advanced-U2
The image below provides a detailed side profile of the robot, useful for verifying real dimensions and the placement of sensor and compute modules.

Mechanical specifications
| Dimensions (standing) | 1320 × 450 × 200 mm |
|---|---|
| Dimensions (folded) | 690 × 450 × 300 mm |
| Weight | ~35 kg |
| Total degrees of freedom | 29 DOF |
| Leg DOF | 12 (6 per leg) |
| Waist DOF | 3 (pitch / roll / yaw) |
| Arm DOF | 14 (7 per arm) |
| Dexterous hands | Not included |
Joint performance
| Peak torque (knee) | 120 N·m |
|---|---|
| Max arm payload | ~3 kg |
| Joint bearing type | Industrial-grade cross-roller bearings |
| Joint motor type | High-speed low-inertia inner-rotor PMSM |
Joint range of motion
| Waist yaw (Z) | ±155° |
|---|---|
| Waist roll (X) | ±45° |
| Waist pitch (Y) | ±30° |
| Knee | 0° ~ 165° |
| Hip pitch (P) | ±154° |
| Hip roll (R) | -30° ~ +170° |
| Hip yaw (Y) | ±158° |
| Wrist pitch (P) | ±92.5° |
| Wrist yaw (Y) | ±92.5° |
Computing and electronics
| Base compute | 8-core high-performance CPU |
|---|---|
| High-power compute module | NVIDIA Jetson Orin 100 TOPS (included) |
| Perception sensors | Depth camera + 3D LiDAR |
| Audio | 4-microphone array, 5 W speaker |
| Connectivity | WiFi 6, Bluetooth 5.2 |
Power supply
| Battery | 9000 mAh smart battery (quick release) |
|---|---|
| Estimated runtime | ~2 h |
| Charger | 54 V / 5 A |
Additional specifications
| Warranty | 12 months |
|---|---|
| Secondary development | Supported |
| Cooling system | Local air cooling |
| Internal wiring | Full-joint hollow electrical wiring |
What's in the Box
- Unitree G1 Edu Advanced-U2 humanoid robot
- NVIDIA Jetson Orin 100 TOPS module (pre-installed)
- 9000 mAh smart battery with quick-release mechanism
- 54 V / 5 A charger
- Manual remote controller
- Protective stand
What programming frameworks does the Unitree G1 Edu Advanced-U2 support?
The robot supports secondary development through Unitree's open SDK, which is compatible with ROS2 and popular deep learning frameworks. The NVIDIA Jetson Orin module allows PyTorch or TensorFlow models to run directly on the robot hardware without requiring an external compute server.
How are the 29 degrees of freedom distributed across the Unitree G1 Edu Advanced-U2?
The 29 DOF are split as follows: 12 in the legs (6 per leg), 14 in the arms (7 per arm), and 3 in the waist. Dexterous hands are not included in this configuration; the arm terminations are designed to accept end-effector attachments for task-specific manipulation experiments.
What distinguishes the Advanced-U2 variant from the standard G1 Edu?
The Advanced-U2 includes the NVIDIA Jetson Orin 100 TOPS high-power compute module as a standard fitted component. Base G1 Edu configurations ship with only the integrated 8-core CPU. The Jetson Orin is what enables onboard AI inference without network latency, making the Advanced-U2 the variant of choice for real-time perception and learning experiments.
Why choose EXPERT3D?
Since 2012, EXPERT3D has supported universities, R&D centres, and technology companies across Spain and Europe in selecting and integrating high-technology equipment. Our technical team evaluates each project before purchase and provides qualified support throughout the full equipment lifecycle — from initial commissioning to workflow integration — backed by a 12-month official warranty and pricing in euros.















