
- Stock: In Stock
- Product code: 10311-000002
- Weight Brutto: 240.00kg
The PUDU T600 Underride is an autonomous mobile robot (AMR) engineered for heavy-payload sub-rack material transport in industrial warehouses and manufacturing facilities. Its 255 mm low-profile chassis navigates directly beneath storage racks and shelves without any structural modifications, carries up to 600 kg, and positions itself with LiDAR SLAM precision in aisles as narrow as 65 cm — enabling fully unmanned intralogistics workflows with native elevator control, e-gate integration, and VDA5050-compliant fleet scheduling.
| Maximum Load | 600 kg (1322.77 lbs) |
|---|---|
| Chassis Height | 255 mm |
| Minimum Passability | 65 cm |
| Battery Life | 12 h (no load) / 6 h (max load) |
Watch the PUDU T600 series in action across a real industrial deployment — both Standard and Underride configurations navigating autonomously, docking with racks, and coordinating cross-floor logistics.
Both T600 platform variants — Standard and Underride — share the same 600 kg rated chassis, giving logistics teams a choice of deployment model without sacrificing payload capacity. The comparison below illustrates this shared load rating across both configurations.

Low-Profile Chassis Built to Work Beneath Your Racks
The defining architectural feature of the T600 Underride is its 255 mm body height. Where conventional AMRs require elevated cargo platforms or additional loading equipment, the T600 Underride slides directly beneath existing storage rack structures, lifts from below, and transports the entire rack assembly autonomously. No facility modifications. No rack replacements. The chassis dimensions of 845 × 500 mm are optimized for the standard rack footprints common in European and North American distribution centers.
This sub-rack approach eliminates an entire handling step from the workflow. The robot becomes the motive force for the rack itself — a structurally clean and scalable solution for high-density goods-to-person automation.

Rack Group Recognition — Precision Autonomous Pick-and-Place
Sub-rack navigation demands more than raw LiDAR mapping: the robot must identify the correct target position within a group of identical racks, dock precisely, and depart without contact damage. The T600 Underride's perception algorithms handle all three. Two docking arrival strategies are configurable:
- Moving Backward: the robot reverses to the designated stop point — maximizes docking accuracy and alignment repeatability
- Direct Arrival: the robot drives to the target position and adjusts its heading in place — faster for open-floor layouts
System integrators can assign arrival mode per rack group based on aisle geometry, keeping the highest-precision strategy for dense rack arrays where contact clearance is minimal.
The sequence below shows T600 Underride units docking beneath loaded storage racks and departing for their target destinations — illustrating both the sub-rack clearance and the precision of autonomous positioning.

LiDAR SLAM Navigation in Aisles as Narrow as 65 cm
The T600 Underride uses LiDAR SLAM (Laser Simultaneous Localization and Mapping) as its sole navigation method — no visual SLAM cameras, no ceiling QR codes, no floor markers. This matters in practice: LiDAR SLAM builds and continuously updates a geometric map of the environment, tolerating dynamic changes such as repositioned racks or temporary aisle blockages without requiring a full remap. Deployment adapts to production layout changes in minutes, not days.
The 65 cm minimum passability width means the T600 Underride operates in aisle configurations that most competing AMRs cannot access. Across a standard warehouse aisle of 70–90 cm, it navigates cleanly, even under loaded conditions where payload overhang may extend slightly beyond the chassis footprint.
Here, multiple T600 Underride units are transporting plastic storage bins through a narrow warehouse aisle — a real-world configuration showing aisle traffic density the intelligent scheduling system is designed to handle.

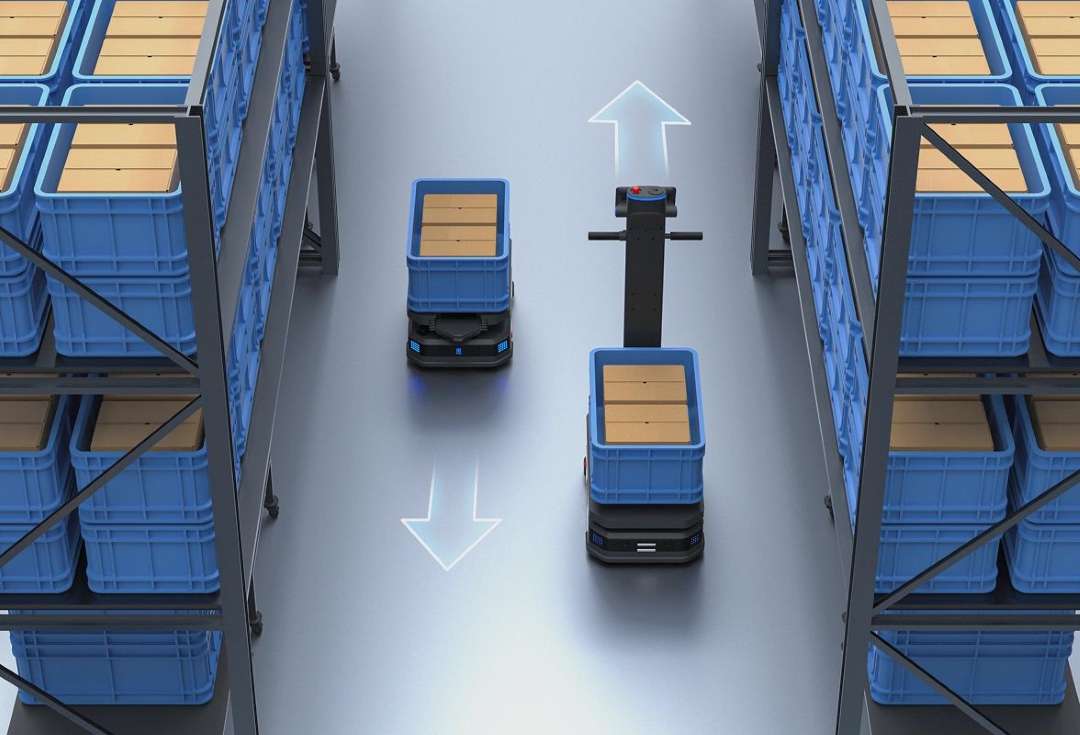
Narrow Aisle Intelligent Traffic Strategy
When a fleet of T600 units shares a facility, aisle throughput becomes the critical bottleneck. PUDU's scheduling system monitors each robot's real-time position and loaded dimensions, then dynamically determines whether the current aisle segment supports single-lane or dual-lane traffic flow. Robots are never unnecessarily queued in aisles that can safely support two-way movement. Conversely, if the loaded width would compromise safe passage, the system enforces single-lane priority automatically.
This overhead view shows two T600 units navigating the same narrow aisle in opposite directions simultaneously — the system has calculated that aisle geometry and current load dimensions permit dual-lane operation, keeping both robots moving without delay.
Elevator Integration and Cross-Floor Logistics
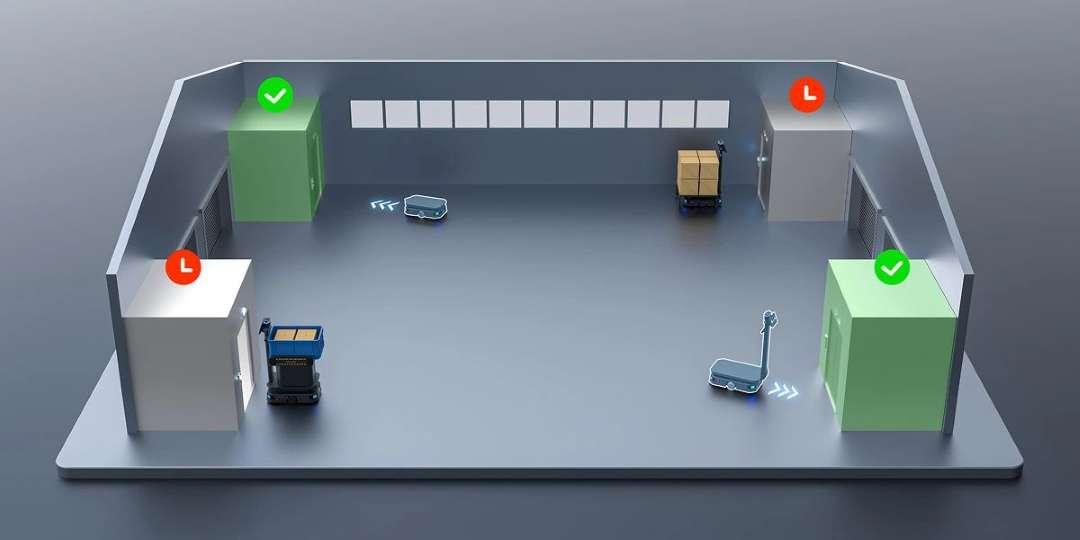
Multi-floor warehouse logistics expose a systemic inefficiency: robots queueing at occupied elevators during shift peaks. The T600 Underride addresses this with idle elevator priority scheduling — the dispatch system monitors all elevator cars in real time, routes robots preferentially to currently idle cars, and avoids both wait-time accumulation and elevator congestion during peak hours. For facilities with multiple elevator banks, the algorithm cross-references travel distance and estimated wait time to select the optimal dispatch point.
The dispatch map below shows a warehouse floor plan with four elevator positions. Green checkmarks mark elevators available for immediate robot dispatch; red indicators show occupied or locked elevators. The scheduler routes the nearest waiting robot to a green-status car automatically.
Beyond elevator control, the T600 Underride connects natively with the full IoT peripheral ecosystem:
- e-gate control — automated door and barrier access along robot routes
- pager call system — task dispatching via push-button hardware terminals
- PUDU Link app — real-time monitoring, mission management, and robot control from mobile devices
- peripheral hardware interface — expandable for custom facility systems and third-party WMS integration
- on-premises deployment — local server or private cloud for closed-network data security
Multi-Layer Safety Architecture for Human-Robot Coexistence
The T600 Underride operates in environments shared with people and manually operated equipment. Its safety stack combines LiDAR for 360° environmental mapping, downward-pointing RGBD depth cameras for low-obstacle detection, and bumper sensors across the chassis perimeter for direct-contact protection. A front-facing camera supplements the sensor array for additional forward-path awareness. All zones are active simultaneously during travel.
The radar visualization here shows the T600's active detection field — concentric sensor zones extend outward from the chassis, detecting the approach of a yellow manual pallet jack before contact is possible. This multi-zone detection gives the robot sufficient reaction distance to plan a smooth avoidance trajectory rather than an abrupt stop.

Dynamic Obstacle Avoidance — Low-Profile Objects Included
At 255 mm chassis height, the T600 Underride's LiDAR scan plane is close to the floor — which means sub-LiDAR objects like debris, cardboard, or small equipment could theoretically pass below the primary detection beam. The downward RGBD cameras close this gap: they detect low obstacles and trigger autonomous rerouting without interrupting the wider fleet's movement. A single robot adjusts; others continue their routes.
As shown here, a warehouse worker approaches the T600's travel path. The combined sensor system registers the human presence and executes a smooth avoidance maneuver, maintaining mission continuity while keeping safe separation distance — the safety contour projector on the Standard version illuminates the floor ahead, while the Underride relies on its sensor-based detection envelope.

Disaster Avoidance — Emergency Response Protocol
The T600 Underride integrates with building safety infrastructure through a dedicated disaster avoidance module. On receiving fire alarm signals, seismic sensor alerts, or equivalent emergency triggers, the robot immediately executes one of two pre-programmed responses: autonomous navigation to the nearest designated safe parking zone, or controlled stop at the closest safe floor position. This ensures cargo-loaded robots do not block evacuation corridors during emergencies.
This illustration shows a fleet-wide simultaneous emergency response — warning indicators activate across all robots, and each unit recalculates its path to clear active working zones, preventing compound hazards from robot-cargo obstruction during an evacuation event.

24/7 Operations — 12-Hour Runtime with Rapid Charging
A single T600 Underride sustains 12 hours of continuous operation under no load — and 6 hours at the full 600 kg rated capacity. This covers a full standard shift with comfortable margin. The 30 Ah lithium-ion pack recharges to 90% in approximately 2 hours, enabling shift-turnaround charging without manual battery handling.
Two charging strategies are supported simultaneously: automatic dock charging, where the robot navigates independently to the nearest available station when battery level drops below the configured threshold, and manual hot-swap battery replacement, which keeps the robot powered for up to 60 seconds during battery removal for a seamless handoff. Both the Standard and Underride models use the same charging station platform, as shown below.

Fleet-Scale Intelligence — Real-Time Monitoring Across Floors
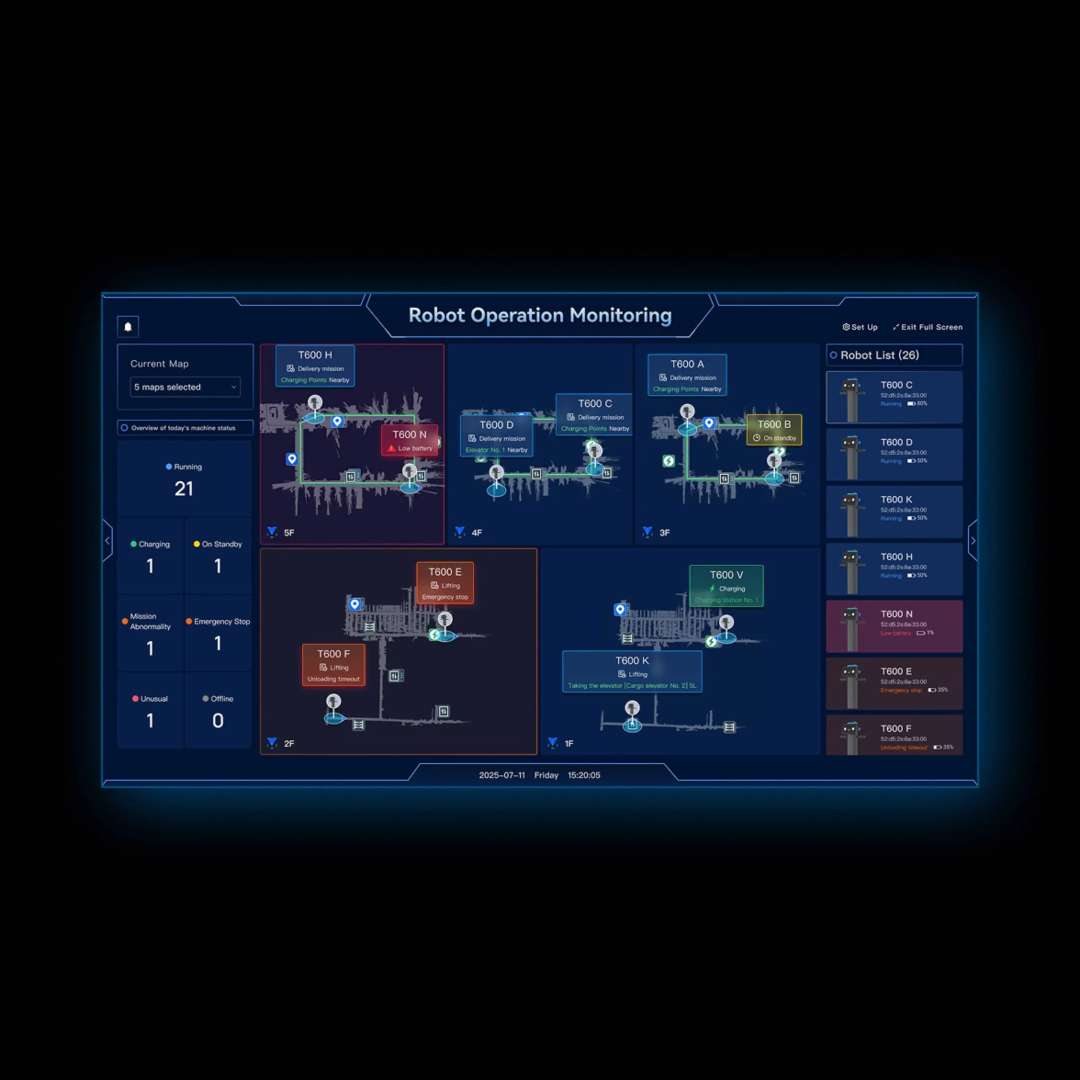
A single T600 Underride is a capable logistics asset. A coordinated fleet of them transforms warehouse throughput. The PUDU fleet management platform consolidates all T600 units across floors, buildings, and sites into a single real-time operations dashboard — displaying mission type, battery percentage, alert status, and physical floor position for every active robot simultaneously.
The dashboard shown here is managing 26 T600 robots distributed across five floors. Color-coded status indicators distinguish actively running robots from those charging, on standby, in emergency stop, or flagged for mission anomaly — giving operations supervisors complete situational awareness without walking the floor.
Scaling beyond a single facility, the T600 Underride's VDA5050 protocol compliance allows it to operate as a peer node within multi-vendor intelligent logistics ecosystems — schedulable alongside any other VDA5050-compliant assets without custom integration. The protocol eliminates the proprietary lock-in that historically fragmented warehouse automation deployments, enabling a truly unified scheduling layer across diverse robotic platforms.
The overview below shows a large-scale industrial facility with dozens of robotic platforms — AMRs, robotic arms, service robots — coordinated through a shared WiFi infrastructure. The T600 Underride participates as a first-class member of this connected environment, receiving and reporting mission data through the same network backbone.

The T600 Series — Underride and Standard Configurations
The T600 Underride is one of two platform variants sharing the same 600 kg chassis foundation. Its counterpart, the T600 Standard, adds a 10.1-inch touchscreen for standalone operation without a central control system, a power-assist push handle, a forward safety contour projector, and hybrid VSLAM+LiDAR navigation. The Standard version stands 960 × 500 × 1350 mm and weighs 112 kg, making it suited for surface-level cargo transport on external loading platforms above rack height.
The Standard version is shown here with an external cargo stand, transporting stacked large boxes — demonstrating the elevated-platform configuration that complements the Underride's sub-rack approach within a mixed-fleet deployment.

The power-assist switch on the Standard model is engineered for moments when manual repositioning is necessary — a pressed switch activates electric drive assist, making it manageable to guide the robot even under significant load. This interface is absent on the Underride (which operates exclusively under autonomous control or via the scheduling system), but contextualizes the T600 platform's design philosophy: usability for the operator at every interaction point.
Here, a worker uses the power-assist handle to guide the T600 Standard through a warehouse aisle, illustrating the human-machine interaction mode available on the Standard configuration during setup, maintenance positioning, or manual task override.

Tech Tip: Before the first deployment run, configure the loaded robot dimensions in Settings > Robot Functions > Run Setting > Total Width (Y) (range: 500–1200 mm) and Rear Overhang (X) (range: 0–400 mm) to match the actual footprint of the T600 Underride with its attached rack or cargo — the narrow-aisle traffic strategy algorithm uses these real-time dimensions to calculate dual-lane eligibility. Undersized values will prevent the system from utilizing dual-lane mode even when geometry permits; oversized values will unnecessarily enforce single-lane routing and reduce throughput. Also ensure mirrored or transparent surfaces at 14–22 cm height are treated with matte stickers before deployment — they can interfere with LiDAR-based localization at the T600 Underride's operating height.
The multi-layer spatial awareness system — combining LiDAR range detection, RGBD depth cameras, and bumper sensors — creates overlapping detection envelopes that account for the robot's low chassis profile. The visualization below shows both Standard and Underride units actively mapping their sensor ranges in a live warehouse environment, with the Underride's ground-level perspective providing particularly dense low-obstacle coverage.

Technical Specifications of the PUDU T600 Underride
Physical Dimensions
| Dimensions (L × W × H) | 845 × 500 × 255 mm (33.3 × 19.7 × 10.0 in) |
|---|---|
| Robot Weight | 94 kg (207.23 lbs) |
| Maximum Load | 600 kg (1322.77 lbs) |
| Chassis Type | Underride (low-profile, sub-rack navigation) |
Performance & Battery
| Operating Voltage | DC 20.8 V ~ 29.2 V |
|---|---|
| Battery Capacity | 30 Ah |
| Charging Time | Approx. 2 h (0% to 90%) |
| Battery Life | 12 h (no load); 6 h (max load 600 kg) |
| Cruise Speed | 0.2–1.2 m/s (adjustable) |
Navigation & Sensors
| Navigation Method | LiDAR SLAM (Laser-SLAM only) |
|---|---|
| Sensors | LiDAR, downward RGBD cameras, bumper sensors, front-view camera |
| Minimum Passability | 65 cm (25.6 in) |
| Max. Obstacle Height (surmountable) | 10 mm (0.39 in) |
| Max. Gap Crossing | 35 mm (1.38 in) |
Operating Conditions
| Operating Temperature | 0°C ~ 40°C (32°F ~ 104°F) |
|---|---|
| Operating Altitude | < 2000 m (6561.68 ft) |
| Battery Storage Temperature | -20°C ~ 60°C (within 1 month); 25%–50% RH |
| Floor Requirements | Dry, flat surface; max slope ≤ 3° |
| Protocol Compliance | VDA5050 |
How to Start Up and Deploy the PUDU T600 Underride
Step-by-step procedure for initial power-on, dimension configuration, and first-deployment preparation of the PUDU T600 Underride autonomous mobile robot, based on the official V1.1.1 Operation Guide.
Step 1: Initial Charge to 100%
Before the very first operational use, charge the battery to 100% using the supplied charger or by docking at the automatic charging station. Insert the wired charger into the charging port, or navigate to "Charge Now" in the PUDU scheduling UI for automatic dock charging. Do not use the robot on a partial charge during first commissioning.
Step 2: Power On the Robot
Press and hold the power switch for approximately 3 seconds until the chassis indicator lights turn blue. This confirms the robot has completed its boot sequence and is ready for configuration or autonomous dispatch. For power-off, press and hold the power switch for 8 seconds (Underride-specific procedure — longer than the Standard version).
Step 3: Configure Loaded Dimensions
Navigate to Settings > Robot Functions > Run Setting and set the operating dimensions to match the robot's loaded footprint. Set Rear Overhang (X) between 0–400 mm and Total Width (Y) between 500–1200 mm to reflect the actual dimensions when the rack or cargo structure is attached. These parameters govern the narrow-aisle traffic strategy — incorrect values reduce fleet throughput.
Step 4: Set the Brake Switch to ON
Verify the brake switch is in the ON (I) position before autonomous operation. The ON position engages the drive wheel braking system for normal autonomous travel. Set it to OFF only when manually pushing the robot for repositioning during maintenance or setup — in OFF mode, the robot will not drive autonomously.
Step 5: Verify Emergency Stop Functionality
Press the red Emergency Stop button at the top of the chassis to confirm it halts the robot immediately. Rotate the button clockwise to release and restore normal operation. Always confirm the emergency stop is functional before the robot enters a live working zone with personnel present.
Step 6: Dispatch the First Mission
With the robot powered on, dimensions configured, and brake engaged, dispatch the first delivery mission through the PUDU scheduling system or compatible VDA5050 fleet management platform. Monitor the first run via the PUDU Link app or the web-based fleet monitoring dashboard to confirm localization accuracy and docking performance at the target rack positions.
What is the maximum payload capacity of the PUDU T600 Underride?
The PUDU T600 Underride has a maximum rated load capacity of 600 kg (1322.77 lbs). Battery runtime under full 600 kg load is 6 hours; under no load, the runtime extends to 12 hours on a single 30 Ah charge.
What is the difference between the T600 Underride and the T600 Standard?
The T600 Underride (845 × 500 × 255 mm, 94 kg) is a low-profile pure chassis designed to navigate beneath storage racks, using LiDAR SLAM navigation only. It has no onboard screen, power-assist handle, or ground safety projector. The T600 Standard (960 × 500 × 1350 mm, 112 kg) adds a 10.1-inch touchscreen for standalone operation without a central control system, a power-assist push handle, a forward safety contour projector, and hybrid VSLAM+LiDAR navigation. Both versions carry up to 600 kg and share the same battery and charging platform.
Does the PUDU T600 Underride support VDA5050 protocol integration?
Yes. The PUDU T600 series is compatible with the VDA5050 standard communication protocol, enabling coordinated scheduling with other compliant robots, WMS systems, and fleet management platforms. No custom development or proprietary middleware is required — the robot joins a VDA5050-compliant logistics network out of the box.
What is the minimum aisle width the T600 Underride can navigate?
The T600 Underride requires a minimum passability of 65 cm (25.6 in). Its 500 mm chassis width provides 15 cm of total clearance in a 65 cm aisle. The Narrow Aisle Intelligent Traffic Strategy dynamically manages single-lane and dual-lane traffic flow based on real-time load dimensions to maximize throughput within these constraints.
Does the PUDU T600 Underride support elevator control for multi-floor operations?
Yes. The T600 series includes native elevator IoT integration with idle elevator priority scheduling — the system monitors elevator availability in real time and routes robots to idle cars first, minimizing cross-floor delivery delays during peak hours. Additional IoT peripherals supported include e-gate control, pager call systems, and the PUDU Link mobile app.
How does the T600 Underride respond to fire alarms or emergency situations?
The T600 Underride is equipped with a dedicated disaster avoidance module connected to building safety systems. Upon receiving a fire alarm or seismic signal, the robot autonomously navigates to a pre-designated safe parking zone or executes a controlled stop at the nearest safe position. This prevents cargo-loaded robots from blocking evacuation routes during emergency events.
Why Choose EXPERT3D?
EXPERT3D has been a specialist in advanced robotics and industrial automation technology since 2012, serving customers across Spain and Europe. Our team provides pre-sales consultation, technical deployment guidance, and post-sale support for the PUDU T600 series — helping you select the right configuration, plan your facility layout, and integrate the robot with your existing WMS or fleet management infrastructure. Fast delivery across the EU, competitive pricing in €, and expert technical support included. Contact us to discuss your logistics automation project ➔




















 – Advertising & Reception Robot")

