









- Disponibilidad: En stock
- Código del producto: GO2-EDU-ENT1
- Peso bruto: 30.00kg
El Unitree Go2 EDU ENT U1 es un robot cuadrúpedo profesional diseñado para inspección en campo, seguridad perimetral e investigación universitaria. Combina el LiDAR 4D L2 de desarrollo propio de Unitree — cobertura hemisférica de 360°×96°, distancia mínima de detección 0,05 m — con 12 motores articulares de aleación de aluminio que alcanzan 45 N.m de par pico, una velocidad máxima de 5 m/s y una batería de larga duración de 15000 mAh. El módulo de carga ENT U1 incorpora un sistema de cámara dual 1080P, foco de 30 W, luces de aviso rojo/azul y un sistema de megafonía digital con alcance de 500–800 m.
| Par máximo articular | ~45 N.m |
|---|---|
| Velocidad máxima | ~5 m/s (Modo Rage, testado en laboratorio) |
| Autonomía de la batería | ~2–4 h (15000 mAh larga duración) |
| Cobertura LiDAR 4D | 360° × 96° hemisférico, mín. 0,05 m |
La imagen siguiente muestra al Go2 EDU en plena secuencia de movimiento sobre una cubierta de madera mojada al aire libre — demostración real de la recuperación de equilibrio en tiempo real y la cinemática de los 12 motores que definen su arquitectura locomotora.

12 Motores Articulares de Precisión: Pendientes de 40°, Escalones de 16 cm, 5 m/s en Modo Rage
Arquitectura Motriz y Gestión Térmica
Cada articulación del Go2 EDU está accionada por un motor de precisión de aleación de aluminio con cableado interno y un refrigerador de tubo de calor propio por junta. El enrutamiento de cables a través de ejes articulares huecos elimina por completo los puntos de enganche en rocas, escaleras o vegetación — un detalle determinante para la fiabilidad en entornos exteriores no estructurados. El par pico de 45 N.m en el mayor motor articular se traduce en capacidad de terreno real: la plataforma supera escalones de 16 cm y pendientes de hasta 40° — más pronunciadas que la mayoría de escaleras convencionales.
El rango de articulación es igualmente generoso. El giro lateral del cuerpo abarca -48° a +48°, el muslo de -200° a +90° y la pantorrilla de -156° a -48°. Esta combinación permite que el robot se comprima desde una huella en posición erguida de 70 × 31 × 40 cm hasta una postura de transporte replegada de 76 × 31 × 20 cm — cabiendo por puertas estándar y compartimentos de carga sin desmontaje.
A continuación, el Go2 EDU demuestra su equilibrio en terreno multiforma, sustentado sobre una roca sumergida con superficie mojada — confirmación visual del sensor de fuerza de contacto de pata que modula continuamente las fuerzas de reacción del suelo.

Modo Rage: Potencia Máxima a 5 m/s
El funcionamiento estándar opera el Go2 EDU a hasta 3.7 m/s con fusión sensorial completa activa. El Modo Rage libera los motores articulares hasta su límite de hardware, alcanzando aproximadamente 5 m/s con respuesta de dirección más agresiva y marcha estable sobre grava, terreno inclinado y césped artificial. La CPU de alto rendimiento de 8 núcleos gestiona simultáneamente locomoción, percepción y comunicación 4G sin limitación térmica — imprescindible para misiones de patrulla ininterrumpida.
LiDAR 4D L2: Inteligencia Hemisférica del Terreno con Mínimo 0,05 m
El LiDAR 4D L2 de desarrollo propio de Unitree barre un campo de 360° horizontal × 96° vertical, generando una nube de puntos cuasi-esférica con una distancia mínima de detección de 0,05 m a ras de suelo. Eso significa que el robot detecta objetos prácticamente a sus propios pies — patas de muebles, bordillos y cables a baja altura que cegarían sensores láser convencionales de un solo plano. La mejora de percepción resultante frente a escáneres estándar de plano único es de aproximadamente el 200%.
La imagen siguiente muestra el sistema ISS 2.0 de seguimiento lateral inteligente activo en exterior, con una superposición de detección de terreno que cartografía el entorno del operador en tiempo real.

ISS 2.0: Posicionamiento 50% Más Preciso, Radio de Seguimiento 30 m
El ISS 2.0 (Sistema de Seguimiento Lateral Inteligente) utiliza tecnología de posicionamiento vectorial inalámbrico para lograr una mejora del 50% en la precisión de posicionamiento planar respecto a la generación anterior, con un radio de seguimiento de operador superior a 30 m en entornos abiertos. La etiqueta UWB integra acelerómetro y giróscopo IMU de 3 ejes para datos de actitud que complementan la pila de evitación de obstáculos del LiDAR. El resultado combinado: el Go2 EDU sigue a su operador por corredores estrechos, caminos exteriores irregulares y pasos parcialmente obstruidos sin intervención manual en el direccionamiento.
SLAM: Mapear, Localizar y Navegar de Forma Autónoma
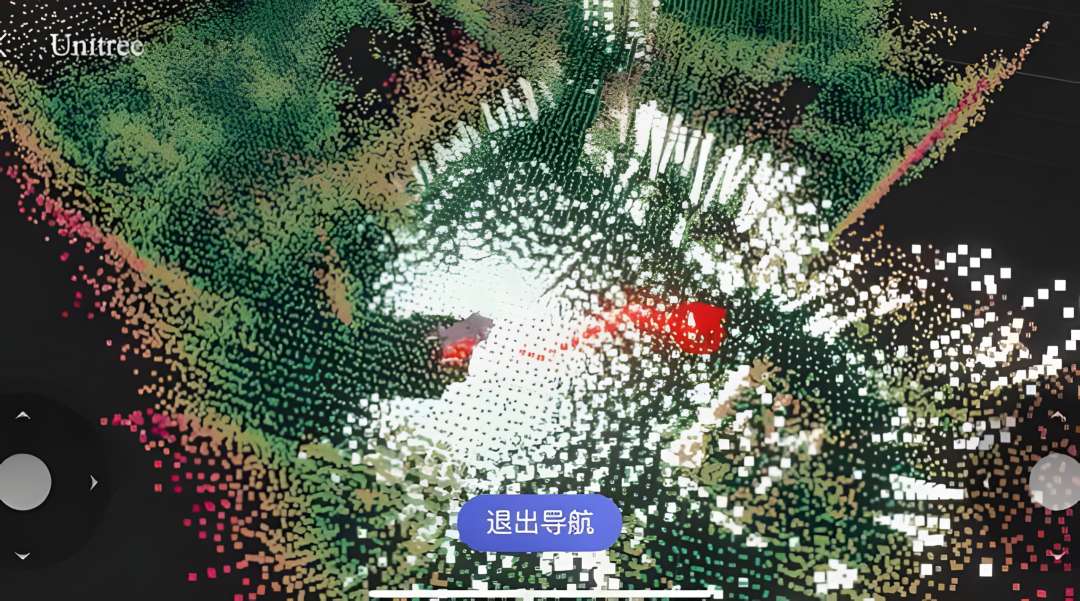
La pila de programas a bordo entrega un pipeline SLAM completo de tres etapas. El cartografiado genera un modelo de entorno en vóxeles 3D persistente; el posicionamiento determina la pose del robot en ese mapa; el módulo de navegación planifica y ejecuta una trayectoria libre de colisiones hasta cualquier punto de paso objetivo. Con la aplicación móvil dedicada, el operador construye un mapa de nube de puntos LiDAR 3D de una zona, define los puntos de paso y el robot los recorre de forma autónoma, adaptando la marcha a los cambios de terreno detectados en tiempo real.
El panel del smartphone a continuación muestra la aplicación Unitree renderizando un mapa de vóxeles 3D LiDAR a color en tiempo real de un entorno exterior — construido íntegramente en el dispositivo con datos del sensor L2.
Carga ENT U1: Cámaras, Foco, Luces de Aviso y Megafonía
La configuración ENT U1 transforma la plataforma de investigación Go2 EDU en una unidad de inspección y patrulla desplegable en campo. El primer plano siguiente muestra el conjunto de sensores frontales del Go2 EDU — la cámara gran angular y el LED delantero que anclan tanto el sistema de navegación base como la carga de imagen mejorada del ENT U1.

Imagen Dual 1080P, Foco de 30 W y Luces de Aviso de Policía
El módulo ENT U1 monta un sistema de cámara dual 1080P gran angular (FOV 120°) con cuatro focos de relleno de alto brillo, sustituyendo la cámara de profundidad estándar por una solución de imagen de calidad radiodifusión. El vídeo se transmite a 1080P HD con latencia de tan solo 180 ms mediante el enlace principal 5.8G; una entrada de puerto de red estándar permite simultáneamente transmisión dual de señal 1080P. El foco de 30 W proporciona 3000 lm, iluminando objetivos de inspección en completa oscuridad. El sistema de aviso rojo/azul (10 W) admite iluminación constante, destellos, alternancia rojo-azul y modos continuos con brillo regulable — haciendo al robot inmediatamente reconocible como unidad oficial de inspección en cualquier condición de iluminación.
Megafonía Digital y Doble Enlace de Comunicación
El ENT U1 integra un sistema digital de codificación/decodificación de megafonía con un alcance del altavoz de 500–800 m. Las funciones del operador incluyen alertas de voz en tiempo real, reproducción y carga de audio grabado y texto a voz — todo controlable desde el mando a distancia con pantalla a prueba de explosiones. El enlace principal opera en telemetría digital 5.8G (transmisión integrada de vídeo y control), con una conexión 4G de red completa como respaldo automático para mantener la accesibilidad si el enlace de radio principal se interrumpe.
Plataforma de Desarrollo Abierta: DDS, ROS2, SLAM, Jetson Orin Opcional
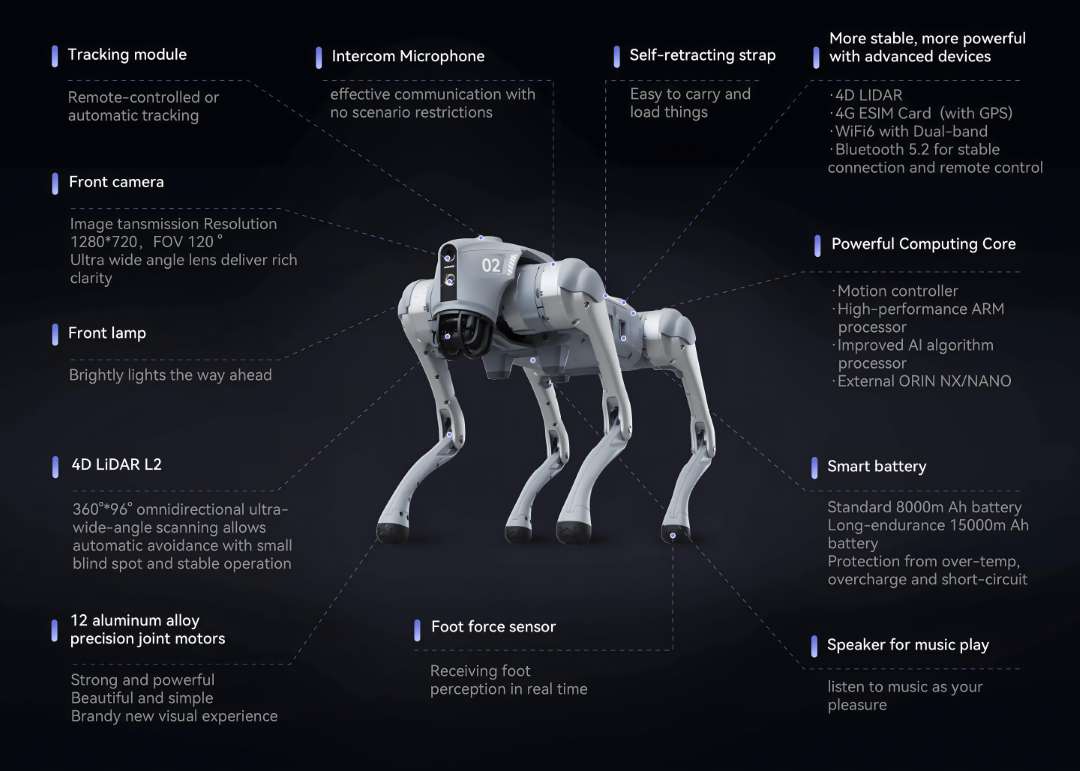
El diagrama de hardware anotado a continuación muestra el esquema completo de componentes del Go2 EDU ENT U1: módulo de seguimiento UWB, micrófono de intercomunicación, cámara frontal (1280×720, FOV 120°), faro delantero, LiDAR 4D L2, 12 motores articulares, sensor de fuerza de extremo de pata, núcleo de computación y la batería inteligente de larga duración — todo integrado en el chasis de ~15 kg de aluminio y plástico técnico de alta resistencia.
unitree_sdk2: DDS, ROS2, C++ y Python
La plataforma EDU expone un entorno de desarrollo secundario completo mediante middleware DDS (C++ y Python) con interfaz ROS2 nativa y RMW adaptativo. Las capas de servicio disponibles abarcan control motor e IMU a bajo nivel, control de movimiento de alto nivel (velocidad, seguimiento de trayectoria, cambio de marcha, evitación de obstáculos), streaming de imagen GST, recuperación de nube de puntos radar y mapa de altitudes, servicios SLAM completos y posicionamiento UWB. Los paquetes ROS2 existentes, controladores de sensores y pipelines de visualización se portan al Go2 EDU con mínimo trabajo de adaptación — un ahorro de tiempo significativo para laboratorios universitarios y equipos de I+D.
Para cargas de trabajo intensivas en cómputo, el Go2 EDU admite un módulo de expansión opcional NVIDIA Jetson Orin NX o Nano que ofrece 40–100 TOPS de inferencia IA, instalado en la bahía de expansión del robot sin modificaciones de cableado externo.
La imagen siguiente muestra a un investigador interactuando directamente con el Go2 EDU a corta distancia — un reflejo del modelo de interacción accesible de la plataforma: comandos de voz sin conexión, sentarse, estirarse, bailar, saltos mortales hacia adelante y múltiples modos de marcha, todo disponible sin programación.

Especificaciones Técnicas del Unitree Go2 EDU ENT U1
Dimensiones Mecánicas
| Dimensiones (posición vertical) | 70 × 31 × 40 cm |
|---|---|
| Dimensiones (posición replegada) | 76 × 31 × 20 cm |
| Peso (con batería) | ~15 kg |
| Material de la carcasa | Aleación de aluminio + plásticos técnicos de alta resistencia |
Parámetros Eléctricos
| Tensión | 28–33,6 V |
|---|---|
| Potencia máxima de trabajo | ~3000 W |
Parámetros de Rendimiento
| Carga útil (típica / máx.) | ~8 kg (MÁX ~12 kg) |
|---|---|
| Velocidad (normal / máx.) | 0–3,7 m/s (MÁX ~5 m/s) |
| Altura máxima de escalón | ~16 cm |
| Ángulo máximo de pendiente | 40° |
| Potencia de computación básica | CPU de alto rendimiento de 8 núcleos |
Parámetros Articulares
| Par máximo articular | ~45 N.m |
|---|---|
| Motores articulares de aluminio | 12 |
| Rango de movimiento — Cuerpo | -48° ~ +48° |
| Rango de movimiento — Muslo | -200° ~ +90° |
| Rango de movimiento — Pantorrilla | -156° ~ -48° |
| Cableado eléctrico interno en articulaciones | Sí |
| Refrigerador de tubo de calor por articulación | Sí |
Sensores y Percepción
| LiDAR 4D | Unitree L2 — 360° × 96° FOV, detección mín. 0,05 m |
|---|---|
| Posicionamiento vectorial inalámbrico (UWB) | Sí — ISS 2.0, posicionamiento planar centimétrico |
| Cámara frontal | 1280 × 720, FOV 120° |
| Cámara de profundidad | Sí (incluida en EDU; sustituida por la cámara dual ENT U1 en esta config.) |
| Sensor de fuerza de extremo de pata | Sí |
Conectividad
| WiFi | WiFi 6 banda dual |
|---|---|
| Bluetooth | Bluetooth 5.2 / 4.2 / 2.1 |
| Módulo 4G | Sí (con GPS) — compatible con 43 países europeos |
Batería y Alimentación
| Capacidad de la batería inteligente | 15000 mAh (larga duración) |
|---|---|
| Autonomía | ~2–4 h |
| Cargador | 33,6 V / 9 A (carga rápida) |
| Compatibilidad con base de carga | Sí |
Funciones y Desarrollo
| Función de voz | Sí (interacción, comandos, intercomunicador, música sin conexión) |
|---|---|
| ISS 2.0 Seguimiento lateral inteligente | Sí — mejora de posicionamiento del 50%, alcance >30 m |
| Desarrollo secundario | Sí — DDS completo (C++ / Python), interfaz ROS2 |
| Servicios SLAM | Sí — cartografiado, posicionamiento, navegación autónoma |
| Módulo de alto rendimiento (opcional) | NVIDIA Jetson Orin NX / Nano — 40–100 TOPS |
| Actualizaciones OTA | Sí |
| Programación gráfica | Sí |
| Cartografía LiDAR 3D (App) | Sí |
ENT U1 — Mando a Distancia con Pantalla
| Pantalla | 5,5" LCD táctil 1080P alta luminosidad |
|---|---|
| SO / RAM / Almacenamiento | Android 9.0 / 2 GB RAM / 16 GB |
| Dimensiones (antena retraída) | 189 × 138 × 41 mm |
| Peso | 850 g |
| Capacidad de la batería | 10200 mAh 7,4 V 2S litio |
| Carga rápida | PD 20 W |
| Tiempo de carga | 5 h (carga rápida 20 W) |
| Autonomía operativa | 13 h |
| Interfaces | USB-A (carga), Type-C (firmware / transferencia), ranura SIM |
ENT U1 — Módulo de Cámara Dual
| Dimensiones del módulo | 106 × 25 × 41 mm |
|---|---|
| Campo visual de la cámara | 120° |
| Peso del módulo | 108 g |
| Consumo | 3 W |
| Potencia / Flujo luminoso del faro | 8 W / 120–140 lm |
ENT U1 — Carga de Inspección
| Foco principal | 30 W / 3000 lm |
|---|---|
| Luces de aviso | Rojo/azul, 10 W — constante, destello, alternante, brillo regulable |
| Transmisión de vídeo | 1080P HD, latencia ≤180 ms, enlace principal 5.8G |
| Alcance de megafonía | 500–800 m |
| Arquitectura de comunicación | 5.8G principal + respaldo 4G red completa (conmutación automática) |
Garantía
| Periodo de garantía | 12 meses |
|---|
Contenido del paquete
- Robot Unitree Go2 EDU (montaje completo con batería de larga duración 15000 mAh)
- Módulo de cámara dual 1080P ENT U1 con 4 focos de relleno (instalado)
- Foco de 30 W y sistema de luces de aviso rojo/azul ENT U1 (instalados)
- Sistema de megafonía digital ENT U1 (instalado)
- Mando a distancia con pantalla Android 9.0 de 5,5" (a prueba de explosiones, 10200 mAh)
- Cargador rápido 33,6 V / 9 A






 Robot Humanoide")
 Robot Humanoide")



















 – Robot de Publicidad y Hostes")

