









- Disponibilidade: Em stock
- Código do produto: GO2-EDU-ENT1
- Peso bruto: 30.00
\n El Unitree Go2 EDU ENT U1 es un robot cuadr�pedo profesional \n dise�ado para inspecci�n en campo, seguridad perimetral e investigaci�n \n universitaria. Combina el LiDAR 4D L2 de desarrollo propio de \n Unitree � cobertura hemisf�rica de 360��96�, distancia m�nima de \n detecci�n 0,05 m � con 12 motores articulares de aleaci�n de aluminio \n que alcanzan 45 N.m de par pico, una velocidad m�xima de 5 m/s y \n una bater�a de larga duraci�n de 15000 mAh. El m�dulo de carga ENT U1 \n incorpora un sistema de c�mara dual 1080P, foco de 30 W, luces \n de aviso rojo/azul y un sistema de megafon�a digital con alcance de \n 500�800 m. \n
\n \n| Par m�ximo articular | \n~45 N.m | \n
|---|---|
| Velocidad m�xima | \n~5 m/s (Modo Rage, testado en laboratorio) | \n
| Autonom�a de la bater�a | \n~2�4 h (15000 mAh larga duraci�n) | \n
| Cobertura LiDAR 4D | \n360� � 96� hemisf�rico, m�n. 0,05 m | \n
\n La imagen siguiente muestra al Go2 EDU en plena secuencia de movimiento sobre \n una cubierta de madera mojada al aire libre � demostraci�n real de la \n recuperaci�n de equilibrio en tiempo real y la cinem�tica de los 12 motores \n que definen su arquitectura locomotora. \n
\n \n
\n
\n
\n\n 12 Motores Articulares de Precisi�n: Pendientes de 40�, Escalones de 16 cm, 5 \n m/s en Modo Rage \n
\n \nArquitectura Motriz y Gesti�n T�rmica
\n \n\n Cada articulaci�n del Go2 EDU est� accionada por un \n motor de precisi�n de aleaci�n de aluminio con cableado interno y un \n refrigerador de tubo de calor propio por junta. El enrutamiento de cables a \n trav�s de ejes articulares huecos elimina por completo los puntos de enganche \n en rocas, escaleras o vegetaci�n � un detalle determinante para la fiabilidad \n en entornos exteriores no estructurados. El par pico de 45 N.m en el \n mayor motor articular se traduce en capacidad de terreno real: la plataforma \n supera escalones de 16 cm y pendientes de hasta 40� � m�s \n pronunciadas que la mayor�a de escaleras convencionales. \n
\n \n\n El rango de articulaci�n es igualmente generoso. El giro lateral del cuerpo \n abarca \n -48� a +48�, el muslo de -200� a +90� y la pantorrilla de \n -156� a -48�. Esta combinaci�n permite que el robot se comprima desde \n una huella en posici�n erguida de 70 � 31 � 40 cm hasta una postura de \n transporte replegada de 76 � 31 � 20 cm � cabiendo por puertas est�ndar \n y compartimentos de carga sin desmontaje. \n
\n \n\n A continuaci�n, el Go2 EDU demuestra su equilibrio en terreno multiforma, \n sustentado sobre una roca sumergida con superficie mojada � confirmaci�n \n visual del sensor de fuerza de contacto de pata que modula continuamente las \n fuerzas de reacci�n del suelo. \n
\n \n
\n
\n
\nModo Rage: Potencia M�xima a 5 m/s
\n \n\n El funcionamiento est�ndar opera el Go2 EDU a hasta 3.7 m/s con fusi�n \n sensorial completa activa. El Modo Rage libera los motores articulares hasta \n su l�mite de hardware, alcanzando aproximadamente 5 m/s con respuesta \n de direcci�n m�s agresiva y marcha estable sobre grava, terreno inclinado y \n c�sped artificial. La CPU de alto rendimiento de 8 n�cleos gestiona \n simult�neamente locomoci�n, percepci�n y comunicaci�n 4G sin limitaci�n \n t�rmica � imprescindible para misiones de patrulla ininterrumpida. \n
\n \nLiDAR 4D L2: Inteligencia Hemisf�rica del Terreno con M�nimo 0,05 m
\n \n\n El LiDAR 4D L2 de desarrollo propio de Unitree barre un campo \n de 360� horizontal � 96� vertical, generando una nube de puntos \n cuasi-esf�rica con una distancia m�nima de detecci�n de 0,05 m a ras de \n suelo. Eso significa que el robot detecta objetos pr�cticamente a sus propios \n pies � patas de muebles, bordillos y cables a baja altura que cegar�an \n sensores l�ser convencionales de un solo plano. La mejora de percepci�n \n resultante frente a esc�neres est�ndar de plano �nico es de aproximadamente el \n 200%. \n
\n \n\n La imagen siguiente muestra el sistema ISS 2.0 de seguimiento lateral \n inteligente activo en exterior, con una superposici�n de detecci�n de terreno \n que cartograf�a el entorno del operador en tiempo real. \n
\n \n
\n
\n
\nISS 2.0: Posicionamiento 50% M�s Preciso, Radio de Seguimiento 30 m
\n \n\n El ISS 2.0 (Sistema de Seguimiento Lateral Inteligente) utiliza tecnolog�a de \n posicionamiento vectorial inal�mbrico para lograr una mejora del 50% en \n la precisi�n de posicionamiento planar respecto a la generaci�n anterior, con \n un radio de seguimiento de operador superior a 30 m en entornos \n abiertos. La etiqueta UWB integra aceler�metro y gir�scopo IMU de 3 ejes para \n datos de actitud que complementan la pila de evitaci�n de obst�culos del \n LiDAR. El resultado combinado: el Go2 EDU sigue a su operador por corredores \n estrechos, caminos exteriores irregulares y pasos parcialmente obstruidos sin \n intervenci�n manual en el direccionamiento. \n
\n \nSLAM: Mapear, Localizar y Navegar de Forma Aut�noma
\n \n\n La pila de programas a bordo entrega un pipeline SLAM completo de tres etapas. \n El cartografiado genera un modelo de entorno en v�xeles 3D persistente; el \n posicionamiento determina la pose del robot en ese mapa; el m�dulo de \n navegaci�n planifica y ejecuta una trayectoria libre de colisiones hasta \n cualquier punto de paso objetivo. Con la aplicaci�n m�vil dedicada, el \n operador construye un mapa de nube de puntos LiDAR 3D de una zona, \n define los puntos de paso y el robot los recorre de forma aut�noma, adaptando \n la marcha a los cambios de terreno detectados en tiempo real. \n
\n \n\n El panel del smartphone a continuaci�n muestra la aplicaci�n Unitree \n renderizando un mapa de v�xeles 3D LiDAR a color en tiempo real de un entorno \n exterior � construido �ntegramente en el dispositivo con datos del sensor L2. \n
\n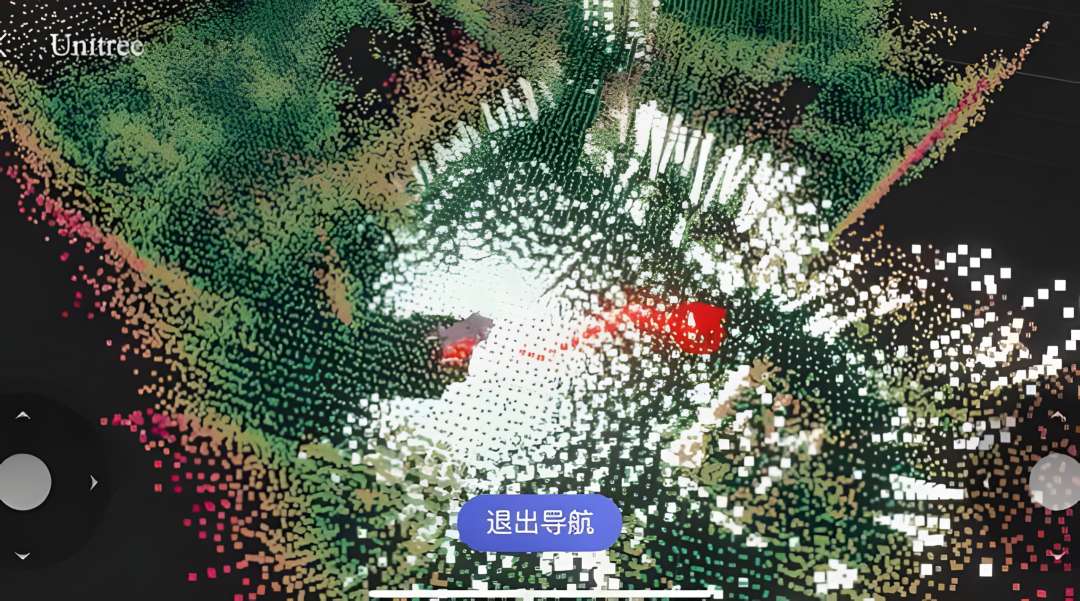 \n
\n
\n
\nCarga ENT U1: C�maras, Foco, Luces de Aviso y Megafon�a
\n \n\n La configuraci�n ENT U1 transforma la plataforma de investigaci�n Go2 EDU en \n una unidad de inspecci�n y patrulla desplegable en campo. El primer plano \n siguiente muestra el conjunto de sensores frontales del Go2 EDU � la c�mara \n gran angular y el LED delantero que anclan tanto el sistema de navegaci�n base \n como la carga de imagen mejorada del ENT U1. \n
\n \n
\n
\n
\nImagen Dual 1080P, Foco de 30 W y Luces de Aviso de Polic�a
\n \n\n El m�dulo ENT U1 monta un \n sistema de c�mara dual 1080P gran angular (FOV 120�) con cuatro \n focos de relleno de alto brillo, sustituyendo la c�mara de profundidad \n est�ndar por una soluci�n de imagen de calidad radiodifusi�n. El v�deo se \n transmite a 1080P HD con latencia de tan solo 180 ms mediante el \n enlace principal 5.8G; una entrada de puerto de red est�ndar permite \n simult�neamente transmisi�n dual de se�al 1080P. El \n foco de 30 W proporciona 3000 lm, iluminando objetivos de \n inspecci�n en completa oscuridad. El sistema de aviso rojo/azul (10 W) \n admite iluminaci�n constante, destellos, alternancia rojo-azul y modos \n continuos con brillo regulable � haciendo al robot inmediatamente reconocible \n como unidad oficial de inspecci�n en cualquier condici�n de iluminaci�n. \n
\n \nMegafon�a Digital y Doble Enlace de Comunicaci�n
\n \n\n El ENT U1 integra un sistema digital de codificaci�n/decodificaci�n de \n megafon�a con un alcance del altavoz de 500�800 m. Las funciones del \n operador incluyen alertas de voz en tiempo real, reproducci�n y carga de audio \n grabado y texto a voz � todo controlable desde el mando a distancia con \n pantalla a prueba de explosiones. El enlace principal opera en \n telemetr�a digital 5.8G (transmisi�n integrada de v�deo y control), con \n una conexi�n 4G de red completa como respaldo autom�tico para mantener la \n accesibilidad si el enlace de radio principal se interrumpe. \n
\n \nPlataforma de Desarrollo Abierta: DDS, ROS2, SLAM, Jetson Orin Opcional
\n \n\n El diagrama de hardware anotado a continuaci�n muestra el esquema completo de \n componentes del Go2 EDU ENT U1: m�dulo de seguimiento UWB, micr�fono de \n intercomunicaci�n, c�mara frontal (1280�720, FOV 120�), faro delantero, LiDAR \n 4D L2, 12 motores articulares, sensor de fuerza de extremo de pata, n�cleo de \n computaci�n y la bater�a inteligente de larga duraci�n � todo integrado en el \n chasis de ~15 kg de aluminio y pl�stico t�cnico de alta resistencia. \n
\n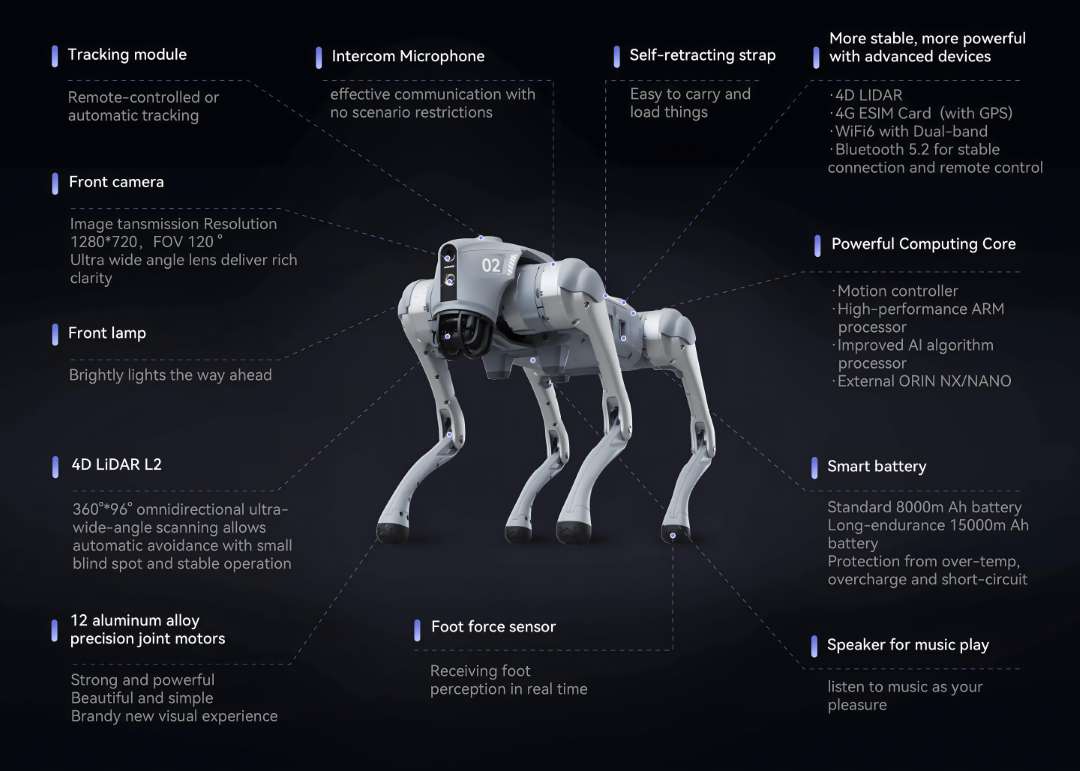 \n
\n
\n
\nunitree_sdk2: DDS, ROS2, C++ y Python
\n \n\n La plataforma EDU expone un entorno de desarrollo secundario completo mediante \n middleware DDS (C++ y Python) con interfaz ROS2 nativa y RMW adaptativo. Las \n capas de servicio disponibles abarcan control motor e IMU a bajo nivel, \n control de movimiento de alto nivel (velocidad, seguimiento de trayectoria, \n cambio de marcha, evitaci�n de obst�culos), streaming de imagen GST, \n recuperaci�n de nube de puntos radar y mapa de altitudes, servicios SLAM \n completos y posicionamiento UWB. Los paquetes ROS2 existentes, controladores \n de sensores y pipelines de visualizaci�n se portan al Go2 EDU con m�nimo \n trabajo de adaptaci�n � un ahorro de tiempo significativo para laboratorios \n universitarios y equipos de I+D. \n
\n \n\n Para cargas de trabajo intensivas en c�mputo, el Go2 EDU admite un \n m�dulo de expansi�n opcional NVIDIA Jetson Orin NX o Nano que \n ofrece 40�100 TOPS de inferencia IA, instalado en la bah�a de expansi�n del \n robot sin modificaciones de cableado externo. \n
\n \n\n La imagen siguiente muestra a un investigador interactuando directamente con \n el Go2 EDU a corta distancia � un reflejo del modelo de interacci�n accesible \n de la plataforma: comandos de voz sin conexi�n, sentarse, estirarse, bailar, \n saltos mortales hacia adelante y m�ltiples modos de marcha, todo disponible \n sin programaci�n. \n
\n \n
\n
\n
\nEspecificaciones T�cnicas del Unitree Go2 EDU ENT U1
\n \nDimensiones Mec�nicas
\n| Dimensiones (posici�n vertical) | \n70 � 31 � 40 cm | \n
|---|---|
| Dimensiones (posici�n replegada) | \n76 � 31 � 20 cm | \n
| Peso (con bater�a) | \n~15 kg | \n
| Material de la carcasa | \n\n Aleaci�n de aluminio + pl�sticos t�cnicos de alta resistencia \n | \n
Par�metros El�ctricos
\n| Tensi�n | \n28�33,6 V | \n
|---|---|
| Potencia m�xima de trabajo | \n~3000 W | \n
Par�metros de Rendimiento
\n| Carga �til (t�pica / m�x.) | \n~8 kg (M�X ~12 kg) | \n
|---|---|
| Velocidad (normal / m�x.) | \n0�3,7 m/s (M�X ~5 m/s) | \n
| Altura m�xima de escal�n | \n~16 cm | \n
| �ngulo m�ximo de pendiente | \n40� | \n
| Potencia de computaci�n b�sica | \nCPU de alto rendimiento de 8 n�cleos | \n
Par�metros Articulares
\n| Par m�ximo articular | \n~45 N.m | \n
|---|---|
| Motores articulares de aluminio | \n12 | \n
| Rango de movimiento � Cuerpo | \n-48� ~ +48� | \n
| Rango de movimiento � Muslo | \n-200� ~ +90� | \n
| Rango de movimiento � Pantorrilla | \n-156� ~ -48� | \n
| \n Cableado el�ctrico interno en articulaciones \n | \nS� | \n
| \n Refrigerador de tubo de calor por articulaci�n \n | \nS� | \n
Sensores y Percepci�n
\n| LiDAR 4D | \n\n Unitree L2 � 360� � 96� FOV, detecci�n m�n. 0,05 m \n | \n
|---|---|
| \n Posicionamiento vectorial inal�mbrico (UWB) \n | \n\n S� � ISS 2.0, posicionamiento planar centim�trico \n | \n
| C�mara frontal | \n1280 � 720, FOV 120� | \n
| C�mara de profundidad | \n\n S� (incluida en EDU; sustituida por la c�mara dual ENT U1 en esta \n config.) \n | \n
| \n Sensor de fuerza de extremo de pata \n | \nS� | \n
Conectividad
\n| WiFi | \nWiFi 6 banda dual | \n
|---|---|
| Bluetooth | \nBluetooth 5.2 / 4.2 / 2.1 | \n
| M�dulo 4G | \n\n S� (con GPS) � compatible con 43 pa�ses europeos \n | \n
Bater�a y Alimentaci�n
\n| \n Capacidad de la bater�a inteligente \n | \n15000 mAh (larga duraci�n) | \n
|---|---|
| Autonom�a | \n~2�4 h | \n
| Cargador | \n33,6 V / 9 A (carga r�pida) | \n
| Compatibilidad con base de carga | \nS� | \n
Funciones y Desarrollo
\n| Funci�n de voz | \n\n S� (interacci�n, comandos, intercomunicador, m�sica sin conexi�n) \n | \n
|---|---|
| \n ISS 2.0 Seguimiento lateral inteligente \n | \n\n S� � mejora de posicionamiento del 50%, alcance >30 m \n | \n
| Desarrollo secundario | \n\n S� � DDS completo (C++ / Python), interfaz ROS2 \n | \n
| Servicios SLAM | \n\n S� � cartografiado, posicionamiento, navegaci�n aut�noma \n | \n
| \n M�dulo de alto rendimiento (opcional) \n | \nNVIDIA Jetson Orin NX / Nano � 40�100 TOPS | \n
| Actualizaciones OTA | \nS� | \n
| Programaci�n gr�fica | \nS� | \n
| Cartograf�a LiDAR 3D (App) | \nS� | \n
ENT U1 � Mando a Distancia con Pantalla
\n| Pantalla | \n5,5" LCD t�ctil 1080P alta luminosidad | \n
|---|---|
| SO / RAM / Almacenamiento | \nAndroid 9.0 / 2 GB RAM / 16 GB | \n
| Dimensiones (antena retra�da) | \n189 � 138 � 41 mm | \n
| Peso | \n850 g | \n
| Capacidad de la bater�a | \n10200 mAh 7,4 V 2S litio | \n
| Carga r�pida | \nPD 20 W | \n
| Tiempo de carga | \n5 h (carga r�pida 20 W) | \n
| Autonom�a operativa | \n13 h | \n
| Interfaces | \n\n USB-A (carga), Type-C (firmware / transferencia), ranura SIM \n | \n
ENT U1 � M�dulo de C�mara Dual
\n| Dimensiones del m�dulo | \n106 � 25 � 41 mm | \n
|---|---|
| Campo visual de la c�mara | \n120� | \n
| Peso del m�dulo | \n108 g | \n
| Consumo | \n3 W | \n
| \n Potencia / Flujo luminoso del faro \n | \n8 W / 120�140 lm | \n
ENT U1 � Carga de Inspecci�n
\n| Foco principal | \n30 W / 3000 lm | \n
|---|---|
| Luces de aviso | \n\n Rojo/azul, 10 W � constante, destello, alternante, brillo regulable \n | \n
| Transmisi�n de v�deo | \n\n 1080P HD, latencia ?180 ms, enlace principal 5.8G \n | \n
| Alcance de megafon�a | \n500�800 m | \n
| Arquitectura de comunicaci�n | \n\n 5.8G principal + respaldo 4G red completa (conmutaci�n autom�tica) \n | \n
Garant�a
\n| Periodo de garant�a | \n12 meses | \n
|---|
\n \n
Contenido del paquete
\n-
\n
- \n Robot Unitree Go2 EDU (montaje completo con bater�a de larga duraci�n 15000 \n mAh) \n \n
- M�dulo de c�mara dual 1080P ENT U1 con 4 focos de relleno (instalado) \n
- \n Foco de 30 W y sistema de luces de aviso rojo/azul ENT U1 (instalados) \n \n
- Sistema de megafon�a digital ENT U1 (instalado) \n
- \n Mando a distancia con pantalla Android 9.0 de 5,5" (a prueba de explosiones, \n 10200 mAh) \n \n
- Cargador r�pido 33,6 V / 9 A \n
\n \n






 Robot Humanoide")
 Robot Humanoide")



















 � Robot de Publicidad y Hostes")

