 Robot Humanoide")
 Robot Humanoide")
 Robot Humanoide")



- Disponibilidade: Em stock
- Código do produto: G1-D-Flagship
- Peso bruto: 80.00
\n El Unitree G1-D Flagship es un robot humanoide de servicio \n sobre ruedas dise�ado para el despliegue comercial sostenido, que combina \n brazos duales de 7 GdL, una columna telesc�pica de altura ajustable \n entre 1260 y 1680 mm y el procesador \n NVIDIA Jetson Orin NX con 100 TOPS de inferencia de \n inteligencia artificial a bordo. Con un peso aproximado de 80 kg y su \n arquitectura de doble bater�a, la plataforma sostiene hasta 6 horas de \n autonom�a del chasis y alcanza una altura operativa m�xima de ~2 m. \n
\n \n| GdL totales (sin efector final) | \n\n 19 (7�2 brazos + 2 cintura + 1 columna + 2 base) \n | \n
|---|---|
| Rango de altura ajustable | \n1260�1680 mm (altura de trabajo m�x. ~2 m) | \n
| M�dulo de computaci�n IA | \nNVIDIA Jetson Orin NX � 100 TOPS | \n
| Autonom�a de la bater�a del chasis | \n~6 h (bater�a integrada de 30 Ah) | \n
\n A diferencia de los humanoides b�pedos, cuyo presupuesto de ingenier�a se \n consume en mantener el equilibrio din�mico, el G1-D Flagship redirige esa \n capacidad �ntegramente hacia la destreza de los brazos y la inteligencia para \n las tareas. El chasis de tracci�n diferencial sobre ruedas elimina la \n complejidad de la estabilizaci�n b�peda, permitiendo que el cuerpo superior se \n concentre en la manipulaci�n de precisi�n y la percepci�n. La imagen siguiente \n muestra al G1-D desempe�ando el papel de barista aut�nomo, gestionando equipos \n de preparaci�n de caf� con una precisi�n que exige un manejo delicado del \n objeto y una repetibilidad posicional fiable. \n
\n \n
\n
\n
\nColumna telesc�pica: de nivel del suelo a 2 m de altura operativa
\n \n\n La decisi�n mec�nica m�s determinante del G1-D es su columna de elevaci�n \n telesc�pica. La columna recorre 450 mm de carrera vertical a una \n velocidad m�xima de 60 mm/s con una precisi�n de posicionamiento de \n 1 mm. A la altura m�nima el robot mide 1260 mm � compacto para \n tareas a nivel del suelo y apto para pasar por puertas est�ndar. En extensi�n \n m�xima alcanza 1680 mm, elevando el espacio de trabajo de los brazos \n hasta ~2 m sobre el suelo. Ese rango cubre pr�cticamente cualquier \n altura de estanter�a presente en entornos de comercio minorista, almac�n y \n laboratorio. La cintura articula simult�neamente en Z�155� y \n Y -2,5� a +135�, permitiendo que los brazos barr�n desde por debajo del \n chasis hasta por encima de la cabeza sin necesidad de reposicionar la base. \n
\n \n\n El diagrama siguiente ilustra tanto la carrera vertical como el rango de \n movimiento completo de la cintura que definen conjuntamente el espacio de \n trabajo ampliado del G1-D, mostrando al robot manipulando una caja de env�o \n est�ndar a la altura de una cinta transportadora. \n
\n \n
\n
\n
\nBrazos de 7 GdL y ecosistema modular de efectores finales
\n \n\n Cada brazo incorpora 7 grados de libertad activos: pitch, roll y yaw de \n hombro, codo, roll de mu�eca, pitch de mu�eca y yaw de mu�eca. Los brazos de 7 \n GdL son el est�ndar de referencia en la manipulaci�n rob�tica de precisi�n \n porque permiten el movimiento continuo en el espacio nulo � el robot puede \n reorientar la mu�eca sin desplazar el efector final, algo crucial en espacios \n de trabajo reducidos. Con una carga �til de ~3 kg por brazo y un \n alcance de ~0,45 m, los brazos gestionan los pesos habituales en \n comercio minorista, hosteler�a, log�stica y ensamblado ligero. \n
\n \n\n El efector final no es fijo: existen cuatro opciones de hardware seg�n la \n aplicaci�n, a saber, una pinza de 2 dedos con control de fuerza, una \n mano diestra de 3 dedos sin sensores t�ctiles, una \n mano diestra de 3 dedos con sensores t�ctiles para tareas que requieren \n retroalimentaci�n de contacto, y una mano diestra de 5 dedos para los \n requisitos de manipulaci�n m�s similares a los humanos. El diagrama anotado \n siguiente muestra las dos configuraciones de altura y la gama completa de \n efectores finales compatibles en contexto. \n
\n \n
\n
\n
\nPlataforma de 19 GdL: la arquitectura cinem�tica explicada
\n \n\n Los 19 grados de libertad totales del cuerpo (sin contar los efectores \n finales) est�n distribuidos con precisi�n deliberada. Los brazos aportan 14 \n GdL (7 por brazo), otorgando a cada miembro la misma redundancia cinem�tica \n que un brazo colaborativo industrial de gama alta. Los 2 GdL de la cintura \n permiten que el torso gire y se incline de forma independiente, desacoplando \n la orientaci�n de los brazos de la direcci�n del chasis. Un GdL de columna \n gestiona el ajuste vertical de altura. Los 2 GdL de la base corresponden al \n manejo diferencial del chasis: velocidad longitudinal y angular de gui�ada. Al \n a�adir una pinza de 2 dedos a cada brazo, el total asciende a 21 GdL. \n
\n \n\n El diagrama de especificaciones de la plataforma siguiente resume el desglose \n completo de GdL por subsistema, confirmando que la arquitectura del brazo por \n s� sola � con 7 GdL por extremidad � iguala la capacidad cinem�tica de un \n brazo colaborativo industrial independiente. \n
\n \n
\n
\n
\n\n Control de baja latencia: teleoperaci�n VR y posicionamiento de precisi�n \n
\n \n\n La teleoperaci�n de alta fidelidad es el mecanismo principal para recopilar \n datos de demostraci�n que entrenan las pol�ticas aut�nomas. El sistema de \n control del G1-D ofrece una latencia de teleoperaci�n de <100 ms con \n una frecuencia de muestreo de 60 Hz � suficientemente r�pido para que \n un operador con visor VR mantenga una sensaci�n convincente de encarnaci�n \n durante la manipulaci�n de precisi�n. La precisi�n de posicionamiento de la \n columna bajo teleoperaci�n VR alcanza �0,5 mm; la precisi�n de la pinza \n del efector final es de �0,1 mm (variable seg�n la configuraci�n del \n efector). Estas tolerancias son determinantes para tareas como la recogida de \n componentes peque�os, la inserci�n de conectores o el plegado de materiales \n flexibles, donde una reproducci�n imprecisa invalidar�a la demostraci�n de \n entrenamiento. \n
\n \n\n La imagen siguiente muestra a un operador realizando teleoperaci�n guiada por \n VR junto al G1-D, con los par�metros de respuesta de control que hacen viable \n la recopilaci�n de datos de calidad a gran escala. \n
\n \n
\n
\n
\nChasis sobre ruedas y navegaci�n SLAM aut�noma
\n \n\n La base m�vil opera con \n tracci�n diferencial de dos ruedas independientes, que admite la \n rotaci�n de 360� en el sitio y una velocidad m�xima de desplazamiento \n de 1,5 m/s. Los sensores integrados del chasis incluyen un \n LiDAR 3D, dos c�maras de profundidad, dos \n sensores de colisi�n f�sica y dos \n sensores de detecci�n de obst�culos bajos � un conjunto de percepci�n \n que permite al robot construir mapas, localizarse, esquivar obst�culos \n din�micos y regresar aut�nomamente a su estaci�n de carga. La navegaci�n se \n gestiona mediante un servicio SLAM accesible por API REST, con soporte para \n puntos de inter�s, paredes virtuales, zonas prohibidas y secuencias de rutas \n multipunto. La bater�a integrada de 30 Ah alimenta el chasis durante \n aproximadamente 6 horas antes de que sea necesario el acoplamiento. La imagen \n siguiente muestra al G1-D ejecutando una tarea de plegado en un dormitorio \n dom�stico � un escenario ilustrativo en el que el chasis navega hasta el lugar \n de trabajo y la columna ajusta su altura para igualar exactamente la \n superficie. \n
\n \n
\n
\n
\nPlataforma de IA extremo a extremo: del dato a la pol�tica desplegada
\n \n\n El G1-D no es simplemente un robot � es el nodo de ejecuci�n f�sica de una \n pila completa de desarrollo de IA encarnada. La plataforma de Unitree integra \n tres capas interconectadas: un conducto de adquisici�n de datos optimizado, un \n entorno completo de entrenamiento e inferencia de modelos, y la arquitectura \n de mundo-modelo�acci�n UnifoLM-WMA-0. El conducto de datos \n estandariza la recopilaci�n mediante gesti�n de plantillas visuales, \n generaci�n de tareas con un clic, programaci�n de alta concurrencia para \n cientos de robots simult�neos y recopilaci�n continua 24/7 � todo ello con \n salida directa a los formatos de entrenamiento m�s utilizados. \n
\n \n\n La imagen siguiente muestra m�ltiples unidades G1-D operando en una l�nea de \n montaje industrial � un escenario de recopilaci�n de datos de alta \n productividad habilitado por la arquitectura concurrente de la plataforma. \n
\n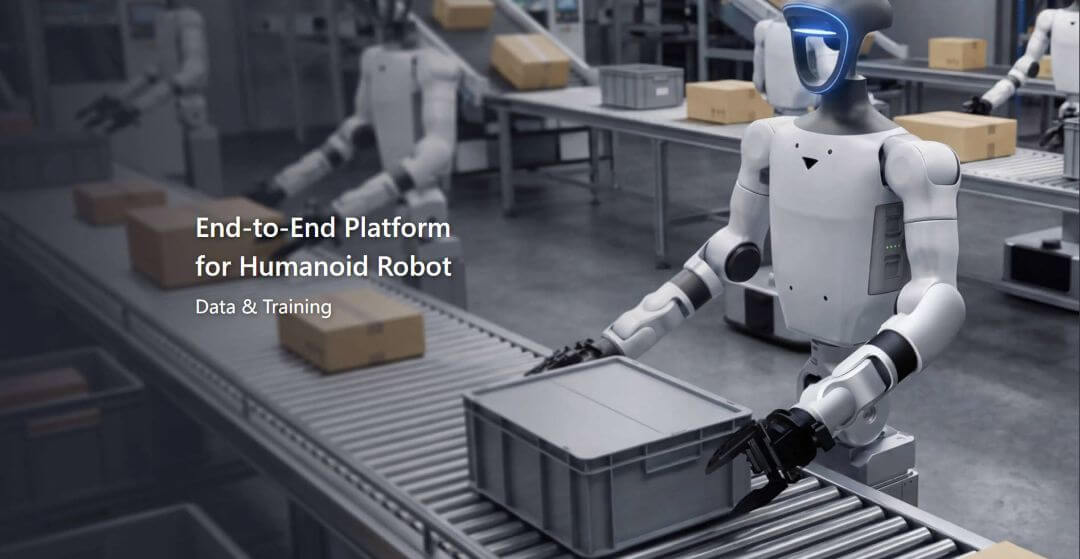 \n
\n
\n
\nUnifoLM-WMA-0: arquitectura mundo-modelo�acci�n
\n \n\n La capa de entrenamiento de modelos soporta entrenamiento distribuido con \n hasta un 90% de utilizaci�n de GPU, integraci�n con modelos de c�digo \n abierto como PI y GROOT, despliegue con un clic y un entorno de \n simulaci�n de alta fidelidad para la evaluaci�n de pol�ticas antes de la \n puesta en producci�n f�sica. En el n�cleo se encuentra \n UnifoLM-WMA-0 � la arquitectura de c�digo abierto de Unitree \n para mundo-modelo�acci�n, que abarca m�ltiples cuerpos rob�ticos. Funciona en \n dos modos: un modo de toma de decisiones que predice interacciones \n f�sicas futuras para guiar la ejecuci�n de pol�ticas, y un \n modo de simulaci�n que genera datos sint�ticos de alta fidelidad a \n partir de entradas de movimiento del robot. El conducto completo Sim2Real est� \n documentado y soportado. \n
\n \nAplicaciones en servicio, comercio minorista e inspecci�n industrial
\n \n\n El alcance variable y la autonom�a SLAM del G1-D permiten su despliegue \n pr�ctico en tres verticales principales. En entornos de comercio minorista, el \n robot puede navegar por los pasillos, identificar posiciones de estanter�a con \n sus c�maras a bordo y reponer productos sin asistencia humana. La imagen \n siguiente muestra al G1-D manipulando productos envasados en una secci�n de \n granel � una tarea que exige identificaci�n precisa del objeto, aplicaci�n \n controlada de fuerza y posicionamiento espacial fiable. \n
\n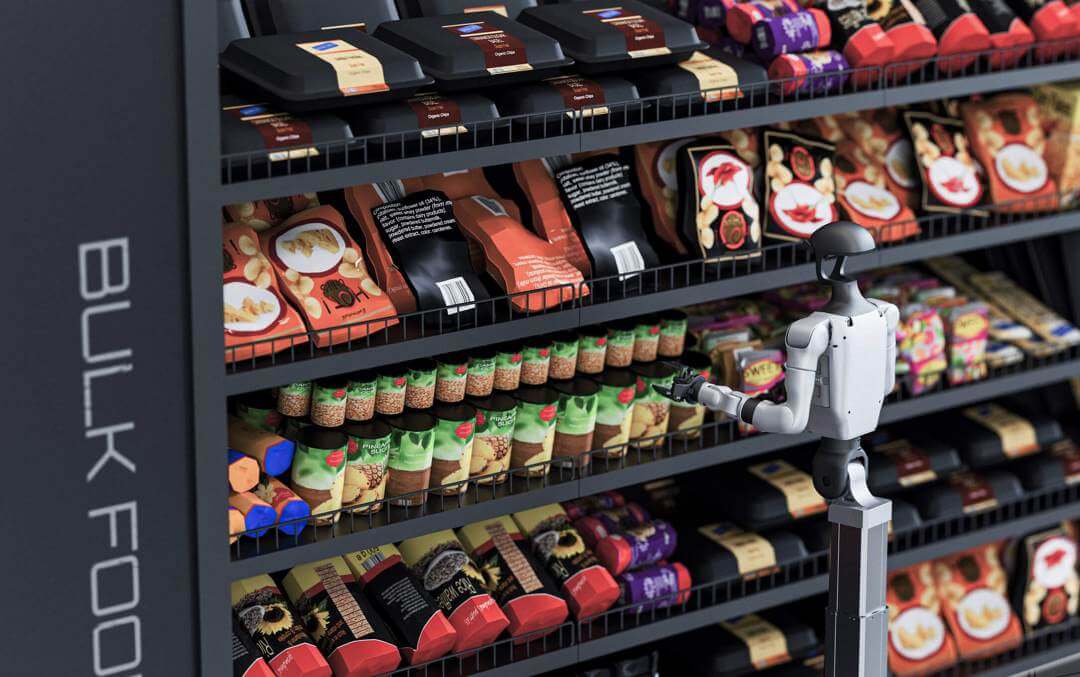 \n
\n
\n
\n\n En contextos industriales y de centros de datos, la capacidad del G1-D para \n navegar por pasillos estrechos, extender la columna hasta posiciones de \n bastidor elevadas y aplicar fuerza controlada a trav�s de sus brazos lo \n convierte en una herramienta viable para la inspecci�n de equipos, la gesti�n \n de cables y la manipulaci�n de componentes. La imagen siguiente muestra la \n plataforma trabajando en una sala de servidores � un espacio caracterizado por \n pasillos estrechos, hardware apilado verticalmente y la necesidad de \n movimientos de brazo de muy alta precisi�n sin contacto no previsto. \n
\n \n
\n
\n
\nEspecificaciones t�cnicas del Unitree G1-D Flagship
\n \nDimensiones mec�nicas
\n| Modelo | \nG1-D Flagship | \n
|---|---|
| \n Dimensiones generales (altura de columna m�nima) \n | \n~1260 � 525 � 570 mm | \n
| \n Dimensiones generales (altura de columna m�xima) \n | \n~1680 � 525 � 570 mm | \n
| Peso total (incl. bater�a) | \n~80 kg | \n
| Sistema de refrigeraci�n | \nRefrigeraci�n local por aire | \n
Grados de libertad
\n| GdL totales (sin efector final) | \n19 | \n
|---|---|
| \n GdL de un solo brazo (sin efector final) \n | \n7 | \n
| GdL de la cintura | \n2 | \n
| GdL de la columna | \n1 | \n
| GdL de la base | \n2 | \n
| \n GdL totales con pinza de 2 dedos �2 \n | \n21 (19 + 1 por pinza � 2) | \n
Rendimiento de los brazos
\n| Carga �til m�xima por brazo | \n~3 kg | \n
|---|---|
| \n Alcance del brazo (sin efector final) \n | \n~0,45 m | \n
| Opciones de efector final | \n\n Pinza de 2 dedos / Mano diestra de 3 dedos (sin t�ctil) / Mano \n diestra de 3 dedos (con t�ctil) / Mano diestra de 5 dedos \n | \n
Rango de movimiento de columna y cintura
\n| \n Carrera de elevaci�n de la columna \n | \n450 mm | \n
|---|---|
| \n Velocidad de elevaci�n de la columna \n | \nM�x. 60 mm/s | \n
| \n Precisi�n de elevaci�n (operaci�n general) \n | \n1 mm | \n
| \n Precisi�n de elevaci�n (teleoperaci�n VR) \n | \n�0,5 mm | \n
| Altura de trabajo m�xima | \n~2 m | \n
| \n Rango articulaci�n de cintura � eje Z \n | \n�155� | \n
| \n Rango articulaci�n de cintura � eje Y \n | \n-2,5� a +135� | \n
Rendimiento del chasis
\n| \n Dimensiones del chasis (L � An � Al) \n | \n570 � 525 � 197 mm | \n
|---|---|
| Modo de conducci�n | \n\n Tracci�n diferencial � admite rotaci�n de 360� en el sitio \n | \n
| \n Velocidad m�xima de desplazamiento \n | \n1,5 m/s | \n
| Sensores del chasis | \n\n LiDAR �1 + C�mara de profundidad �2 + Sensor de colisi�n f�sica �2 + \n Sensor de detecci�n de obst�culos bajos �2 \n | \n
Computaci�n e inteligencia artificial
\n| Potencia de computaci�n b�sica | \nCPU de alto rendimiento de 8 n�cleos | \n
|---|---|
| \n M�dulo de computaci�n de alto rendimiento \n | \nNVIDIA Jetson Orin NX 16 GB (100 TOPS) | \n
Sensores y percepci�n
\n| C�mara binocular HD en la cabeza | \n\n �1 � FOV: H 115�, V 80�, D 125� � Resoluci�n: 3840 � 1200 \n | \n
|---|---|
| C�mara HD en la mu�eca | \n\n �2 � FOV: H 130�, V 60�, D 160� � Resoluci�n: 1920 � 1080 \n | \n
| LiDAR base | \n�1 | \n
| C�mara de profundidad base | \n�2 | \n
| Sensor de colisi�n f�sica (base) | \nPresente | \n
| \n Sensor de detecci�n de obst�culos bajos (base) \n | \nPresente | \n
Audio e interacci�n
\n| Matriz de micr�fonos | \n\n Array lineal de 4 micr�fonos, separaci�n de 20 mm \n | \n
|---|---|
| Altavoz | \n8 ? 3 W (5 W pico) | \n
| Tira de luz RGB | \n256 colores | \n
| ASR (reconocimiento de voz) | \nModelo local sin conexi�n | \n
| TTS (texto a voz) | \nS�ntesis local sin conexi�n � chino e ingl�s | \n
Conectividad
\n| WiFi | \nWiFi 6 | \n
|---|---|
| Bluetooth | \nBluetooth 5.2 | \n
Control y teleoperaci�n
\n| \n Latencia del sistema de teleoperaci�n \n | \n<100 ms | \n
|---|---|
| Frecuencia de muestreo | \n60 Hz | \n
| \n Precisi�n de la pinza del efector final \n | \n\n �0,1 mm (variable seg�n la configuraci�n del efector) \n | \n
Alimentaci�n y bater�a � cuerpo superior
\n| \n Fuente de alimentaci�n cuerpo superior \n | \nBater�a o conexi�n directa por cable | \n
|---|---|
| \n Capacidad de la bater�a del cuerpo superior (extracci�n r�pida) \n | \n9000 mAh | \n
| \n Autonom�a de la bater�a del cuerpo superior \n | \n~2 h | \n
| Cargador del cuerpo superior | \n54 V / 5 A | \n
Alimentaci�n y bater�a � chasis
\n| Fuente de alimentaci�n del chasis | \nBater�a / estaci�n de carga | \n
|---|---|
| \n Capacidad de la bater�a del chasis (integrada) \n | \n30 Ah | \n
\n Autonom�a de la
Recently Viewed Robot Humanoide")
 Robot Humanoide")
Brand: Unitree
Código do produto: G1-D-Flagship
\n El Unitree G1-D Flagship es un robot humanoide de servicio
\n sobre ruedas dise�ado para el despliegue comercial sostenido, que combina
\n brazo..
59 000€
Sem IVA:48 760€


Brand: XGRIDS
Código do produto: 920372000000574440
XGRIDS L2 Pro backpack - mochila con arnés para escáneres 3D XGRIDS L2 Pro
La mochila con arnés para escáneres 3D XGRIDS L2 Pro es un accesorio espec..
968€
Sem IVA:800€
, Chicle de arándano")
Brand: Bambu Lab
Código do produto: 920372000000576024
Filamento PLA Basic Gradient Bambu Lab, 1.75 mm, 1 kg (Con carrete),
Chicle de arándano
El Filamento PLA Basic Gradient Bambu Lab en..
26€
Sem IVA:21€


Brand: Unitree
Código do produto: G1-AIR
El Unitree G1 AIR es un robot humanoide compacto y totalmente el�ctrico dise�ado para demostraciones
\n profesionales, eventos en directo y exhibic..
24 805€
Sem IVA:20 500€
Brand: Unitree
Código do produto: 920372000000574904
El Unitree G1 Edu Standard-U1 es un robot humanoide compacto dise�ado para la investigaci�n avanzada en inteligencia artificial y la rob�tica educativ..
35 000€
Sem IVA:28 926€
Brand: Unitree
Código do produto: 920372000000574888
El Unitree G1 Edu Flagship C-U5 es un robot humanoide a escala real dise�ado para investigaci�n avanzada de inteligencia artificial, experimentos de i..
69 900€
Sem IVA:57 769€
Brand: Unitree
Código do produto: 920372000000574880
El Unitree G1 Edu Flagship B-U4 es un robot humanoide de tama�o real destinado a universidades, laboratorios de I+D y programas avanzados de rob�tica,..
62 900€
Sem IVA:51 983€
Brand: Unitree
Código do produto: 920372000000574864
El Unitree G1 Edu Advanced-U2 es un robot humanoide de investigaci�n con 29 grados de libertad dise�ado para universidades, laboratorios de I+D y equi..
41 900€
Sem IVA:34 628€
Brand: Unitree
Código do produto: 920372000000574872
El Unitree G1 Edu Flagship A-U3 es un robot humanoide de investigaci�n dise�ado para laboratorios de rob�tica avanzada e IA encarnada, equipado con 43..
53 900€
Sem IVA:44 545€
Brand: Unitree
Código do produto: 920372000000574896
El Unitree G1 Edu Flagship D-U6 es un robot humanoide de investigaci�n con 41 grados de libertad, dise�ado para el desarrollo de inteligencia artifici..
69 000€
Sem IVA:57 025€
Brand: Unitree
Código do produto: RB-G1-U7-EDU
El UNITREE G1-U7 EDU es un robot humanoide de tama�o real dise�ado para la investigaci�n acad�mica, la automatizaci�n industrial y el desarrollo avanz..
64 900€
Sem IVA:53 636€
Brand: Unitree
Código do produto: G1-U8-EDU
El Unitree G1-U8 EDU es un robot humanoide de talla completa dise�ado para investigaci�n en rob�tica, educaci�n avanzada y prototipado de automatizaci..
58 000€
Sem IVA:47 934€
Brand: Unitree
Código do produto: G1-U9-EDU
El UNITREE G1-U9 EDU es un robot humanoide de escala real dise�ado para investigaci�n avanzada y automatizaci�n industrial, con una altura de 1.320 mm..
59 000€
Sem IVA:48 760€
Brand: Unitree
Código do produto: G1-U10-EDU
El Unitree G1-U10 EDU es un robot humanoide de tama�o real dise�ado para la investigaci�n en aprendizaje por imitaci�n con IA, manipulaci�n avanzada y..
54 000€
Sem IVA:44 628€


Brand: Unitree
Código do produto: G1-COMP-EDU
\n El Unitree G1-Comp EDU es un robot humanoide b�pedo de tama�o
\n real dise�ado espec�ficamente para la rob�tica competitiva y la investigaci�n
\n..
46 900€
Sem IVA:38 760€


Brand: Unitree
Código do produto: GO2-EDU-ENT1
\n El Unitree Go2 EDU ENT U1 es un robot cuadr�pedo profesional
\n dise�ado para inspecci�n en campo, seguridad perimetral e investigaci�n
\n unive..
17 500€
Sem IVA:14 463€
Brand: Unitree
Código do produto: 920372000000574816
\n
\n
\n
\n Desbloquee todo el potencial de la
\n inteligencia artificial integrada con el
\n Perro Rob�tico Unitree Go2 Edu Intelligent U2, una
..
17 500€
Sem IVA:14 463€
Brand: Unitree
Código do produto: 920372000000574824
\n
\n
\n
\n Perro Rob�tico Unitree Go2 L�ser Inteligente U3: El Futuro de la Rob�tica IA
\n
\n
\n Desbloquee todo el
\n potencial de la inteligen..
18 900€
Sem IVA:15 620€

Brand: PUDU
Código do produto: 00-00014079
PUDU MT1 Max robot industrial aut�nomo de limpieza con IA\n\nPUDU MT1 Max es un robot de limpieza industrial de nueva generaci�n dise�ado para automat..
24 079€
Sem IVA:19 900€


Brand: PUDU
Código do produto: 00-00014081
PUDU CC1 Pro robot inteligente de limpieza con IA\n\nPUDU CC1 Pro es una soluci�n avanzada de limpieza aut�noma dise�ada para el mantenimiento complet..
24 200€
Sem IVA:20 000€

Brand: PUDU
Código do produto: 00-00014080
PUDU CC1 Black Pro robot inteligente de limpieza con IA\n\nPUDU CC1 Black Pro es una versi�n mejorada de la serie CC1, dise�ada para el mantenimiento ..
25 410€
Sem IVA:21 000€


Brand: PUDU
Código do produto: 00-00014083
PUDU BellaBot Pro (White) robot inteligente de entrega y publicidad\n\nPUDU BellaBot Pro (White) es un robot de servicio aut�nomo dise�ado para restau..
13 310€
Sem IVA:11 000€


Brand: PUDU
Código do produto: 00-00014082
PUDU BellaBot Pro (Black) robot inteligente de entrega y publicidad
\n
\nPUDU BellaBot Pro (Black) es un robot de servicio aut�nomo moderno dise�ado p..
13 310€
Sem IVA:11 000€


Brand: PUDU
Código do produto: 10080-000097
\n El PUDU SwiftBot es un robot de servicio comercial de\n interior dise�ado para la entrega aut�noma de alimentos, el transporte de\n art�culos y ..
13 915€
Sem IVA:11 500€

Brand: PUDU
Código do produto: 10040-000071
\n El PUDU BellaBot es un robot de reparto aut�nomo de interior dise�ado para\n restaurantes, hoteles y entornos de servicio comercial, que combina ..
9 680€
Sem IVA:8 000€


Brand: PUDU
Código do produto: 10070-000059
PUDU KettyBot Pro es un robot aut�nomo de entrega y recepci�n dise�ado para restaurantes, hoteles y entornos de venta al p�blico, con navegaci�n SLAM ..
9 075€
Sem IVA:7 500€


Brand: PUDU
Código do produto: 10170-000015
\n El PUDU PuduBot 2 es un robot de reparto aut�nomo para\n interiores dise�ado para entornos comerciales de alta actividad: restaurantes,\n hotele..
7 078€
Sem IVA:5 850€

Brand: PUDU
Código do produto: 10050-000069
\n El PUDU HolaBot es un robot de servicio aut�nomo de alta\n capacidad dise�ado para entornos de hosteler�a, sanidad y comercio con alto\n volumen..
11 011€
Sem IVA:9 100€


Brand: PUDU
Código do produto: 10250-000008
\n El PUDU MT1 es un robot barredora aut�nomo con inteligencia\n artificial, dise�ado para entornos comerciales e industriales de gran\n afluencia:..
18 029€
Sem IVA:14 900€

Brand: PUDU
Código do produto: 10080-000037
\n El PUDU FlashBot es un robot aut�nomo de entrega para edificios dise�ado\n espec�ficamente para hoteles y torres de oficinas de m�ltiples plantas..
16 335€
Sem IVA:13 500€
 � Robot de Publicidad y Hostes")
Brand: PUDU
Código do produto: 10070-000011
\n PUDU KettyBot es un robot de entrega y recepci�n\n multiprop�sito dise�ado para restaurantes, hoteles, supermercados y entornos\n comerciales de..
8 349€
Sem IVA:6 900€

Brand: PUDU
Código do produto: 10251-000002
\n El PUDU MT1 Vac es un robot de limpieza aut�nomo 3 en 1 de\n gama comercial con inteligencia artificial � barre, aspira y pasa mopa �\n dise�ado..
18 029€
Sem IVA:14 900€

Brand: PUDU
Código do produto: 10260-000013
\n El PUDU T300 Elevator es un robot m�vil aut�nomo (AMR)\n industrial dise�ado para el transporte de materiales y la gesti�n de cargas\n pesadas e..
20 570€
Sem IVA:17 000€
¿Aún no tienes una cuenta?
|