









- Disponibilidade: Em stock
- Código do produto: GO2-EDU-ENT-U5
- Peso bruto: 38.00
\n El Unitree Go2 EDU ENT U5 es un robot cuadr�pedo de grado \n investigador dise�ado para inspecci�n aut�noma, vigilancia en campo y \n desarrollo en plataforma abierta. Combina la base Go2 EDU � \n equipada con LiDAR 4D L2, sensores de fuerza en las patas y acceso completo al \n desarrollo secundario � con un gimbal de doble luz estabilizado en tres ejes \n que integra una c�mara visible Sony CMOS de 8 MP y un \n sensor termogr�fico de 640�512 p�xeles, operado mediante un mando a \n distancia con pantalla de 5,5 pulgadas. \n
\n \n| Velocidad m�xima de desplazamiento | \n0~3,7 m/s (l�mite ~5 m/s) | \n
|---|---|
| Par m�ximo de articulaci�n | \n~45 N.m | \n
| Resoluci�n c�mara termogr�fica | \n640�512 px (longitud de onda 8~14 �m) | \n
| Autonom�a de la bater�a | \n~2~4 h (15 000 mAh larga duraci�n) | \n
\n La imagen siguiente muestra el sistema completo Go2 EDU ENT U5: el chasis \n cuadr�pedo con el gimbal de doble luz montado en la parte superior y el mando \n a distancia con pantalla t�ctil de 5,5 pulgadas. \n
\n \n
\n
\n
\n\n Locomoci�n todo terreno: articulaciones de 45 N.m, pendiente 40�, Modo Rage \n
\n \n\n Con ~15 kg de peso y una carga �til nominal de ~8 kg (hasta \n 12 kg de l�mite), el Go2 EDU se desplaza con una seguridad que las \n plataformas de inspecci�n m�s pesadas no pueden igualar. Doce motores de \n articulaci�n de aleaci�n de aluminio � cada uno refrigerado mediante conducto \n de calor interno y conectado por un circuito intra-articular que elimina el \n cableado exterior � generan un par m�ximo de ~45 N.m. El rango de \n movimiento cubre el cuerpo -48~+48�, el muslo -200~+90� y la \n pantorrilla -156~-48�, lo que permite transiciones agachadas suaves y \n subida estable de escaleras. \n
\n \n\n El Modo Rage desbloquea el pleno potencial del hardware para operaci�n en \n terreno abierto: la velocidad punta sube a ~5 m/s, la respuesta de \n direcci�n se agudiza y la zancada se adapta din�micamente a gravilla, rampas y \n suelos irregulares. La velocidad est�ndar de operaci�n es de 3,7 m/s. \n La altura m�xima de escal�n es ~16 cm y el �ngulo m�ximo de pendiente \n es 40� � suficiente para la mayor�a de escaleras industriales y \n terrenos sin preparar. \n
\n \n\n La secuencia siguiente captura al Go2 en pleno movimiento sobre una tarima de \n madera, ilustrando el equilibrio din�mico fluido que mantiene el controlador \n de cuerpo completo incluso sobre superficies elevadas y resbaladizas. \n
\n \n
\n
\n
\nLiDAR 4D L2 e ISS 2.0: conciencia espacial a 360��96�
\n \n\n Todos los Go2 EDU incluyen el \n LiDAR 4D L2 de desarrollo propio de Unitree � un esc�ner \n hemisf�rico con cobertura de 360��96� y distancia m�nima de detecci�n \n de 0,05 m. La amplia envolvente angular elimina los puntos ciegos que \n presentan los sistemas LiDAR planares 2D convencionales, permitiendo la \n creaci�n de mapas de nube de puntos en tiempo real de habitaciones, pasillos y \n entornos exteriores en un �nico barrido. \n
\n \n\n El ISS 2.0 (Sistema Inteligente de Seguimiento Lateral) ampl�a esta \n conciencia espacial con tecnolog�a de posicionamiento vectorial inal�mbrico. \n La precisi�n de posicionamiento mejora un 50% respecto a la primera \n generaci�n, con una distancia de seguimiento fiable de m�s de 30 m en \n campo abierto. Combinado con la estrategia optimizada de evasi�n de obst�culos \n m�ltiples, el ISS 2.0 permite al Go2 acompa�ar a un operador por entornos \n complejos sin interrumpir su ciclo de marcha. La imagen siguiente muestra al \n robot rastreando a una persona en movimiento con la visualizaci�n de digitalizado \n LiDAR activa. \n
\n \n
\n
\n
\nCartograf�a 3D LiDAR y navegaci�n aut�noma
\n \n\n Usando la aplicaci�n de acompa�amiento y el LiDAR L2 integrado, los operadores \n pueden construir mapas de nube de puntos 3D de cualquier �rea delimitada y \n definir rutas de puntos de paso aut�nomos para que el Go2 los siga sin \n intervenci�n humana. La c�mara frontal gran angular (FOV 120�, \n resoluci�n 1280�720) y el faro LED frontal � visibles en el primer plano \n siguiente � iluminan zonas de inspecci�n oscuras y proporcionan transmisi�n de \n imagen en directo a la pantalla del operador. \n
\n \n
\n
\n
\n\n Payload U5: gimbal de doble luz con termograf�a estabilizado en tres ejes \n
\n \n\n La configuraci�n ENT U5 a�ade la capacidad distintiva que la diferencia de la \n plataforma EDU base: un gimbal de doble luz con \n estabilizaci�n en tres ejes sobre los ejes de rumbo, inclinaci�n y \n balanceo. La oscilaci�n angular se limita a �0,01� � precisi�n \n suficiente para el an�lisis termogr�fico de fino detalle incluso mientras el \n robot camina activamente. El gimbal pesa 177 g sin la placa \n amortiguadora (197 g con ella) y opera en un rango de alimentaci�n de \n 11~25,2 V con un consumo medio de 6 W. \n
\n \n\n El gimbal aloja dos sistemas �pticos independientes que trabajan en paralelo. \n La c�mara de luz visible usa un sensor CMOS Sony 1/2.8 pulgadas de \n 8 MP, zoom digital fijo 6� (distancia focal equivalente 20 mm), \n apertura F2,8 y campo visual diagonal de 93�. Graba v�deo hasta \n 4K @ 30 fps y captura fotos en 3840�2160. La \n c�mara t�rmica (infrarroja) usa un microbol�metro de �xido de vanadio \n (VOx) sin refrigerar de 640�512 p�xeles, objetivo fijo atermalizadode \n 13 mm / F1,0 con cobertura espectral de 8~14 �m y zoom \n electr�nico 2�. La medici�n de temperatura abarca \n -20 a +150 �C en ganancia alta (�2 �C de precisi�n) y se extiende hasta \n +550 �C en ganancia baja (�5% de precisi�n) � cubriendo desde la \n trazabilidad t�rmica de tuber�as hasta la evaluaci�n de riesgo de incendio. \n
\n \n\n El eje de inclinaci�n recorre de -90� (hacia abajo) a +25�, la \n rotaci�n horizontal alcanza �270� y la compensaci�n de balanceo cubre \n �45� � una cobertura que permite inspeccionar infraestructuras a�reas, \n activos a nivel del suelo y cualquier �ngulo intermedio sin reposicionar el \n robot. \n
\n \nArquitectura de computaci�n y plataforma de desarrollo abierto
\n \n\n El Go2 EDU funciona con una CPU de 8 n�cleos de alto rendimiento para \n el control primario de movimiento, la fusi�n de sensores y las tareas de \n inferencia de IA, incluidos el modo avanzado, la cartograf�a 3D LiDAR y el \n procesamiento de comandos de voz. Para equipos que requieran mayor c�mputo a \n bordo � integraci�n de modelos de lenguaje extenso, SLAM visual o flujos de \n trabajo de aprendizaje profundo personalizados � la variante EDU admite un \n m�dulo NVIDIA Jetson Orin opcional (40~100 TOPS) como unidad \n de computaci�n de expansi�n. El infograma siguiente muestra todos los \n componentes clave del sistema y sus interconexiones. \n
\n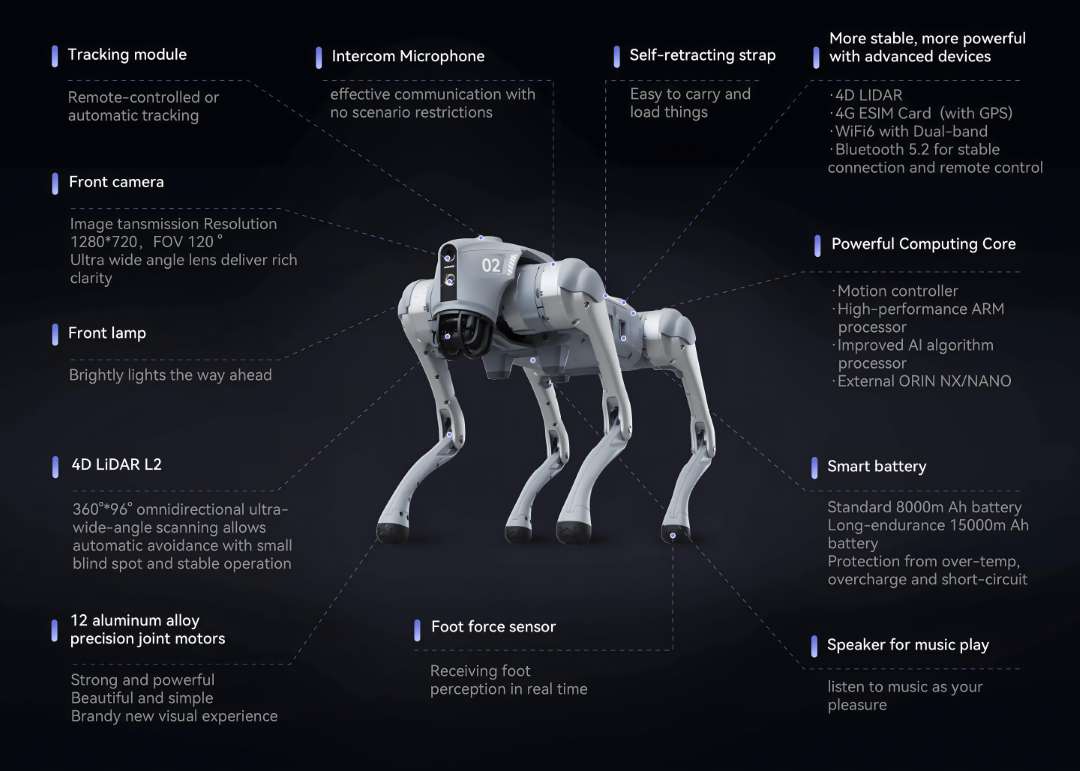 \n
\n
\n
\n\n La conectividad comprende Wi-Fi 6 de banda dual, \n Bluetooth 5.2/4.2/2.1 y un m�dulo 4G con GPS integrado para \n despliegues remotos fuera del alcance de la red local. El Go2 EDU es la �nica \n variante de la gama con acceso completo al desarrollo secundario � \n integraci�n ROS completa, modificaci�n de par�metros de marcha personalizados, \n API de transmisi�n de datos de sensores y soporte para programaci�n gr�fica. \n Las actualizaciones OTA del firmware mantienen el controlador de movimiento y \n la pila de aplicaciones al d�a de forma autom�tica. \n
\n \nCartograf�a 3D LiDAR: nube de puntos en campo
\n \n\n La imagen siguiente es un mapa de nube de puntos en tiempo real generado por \n el LiDAR L2 del Go2 durante una misi�n de cartograf�a aut�noma. La \n representaci�n de densidad codificada por colores muestra la comprensi�n \n geom�trica precisa del robot de su entorno � datos que alimentan directamente \n la planificaci�n aut�noma de rutas y la clasificaci�n de obst�culos. \n
\n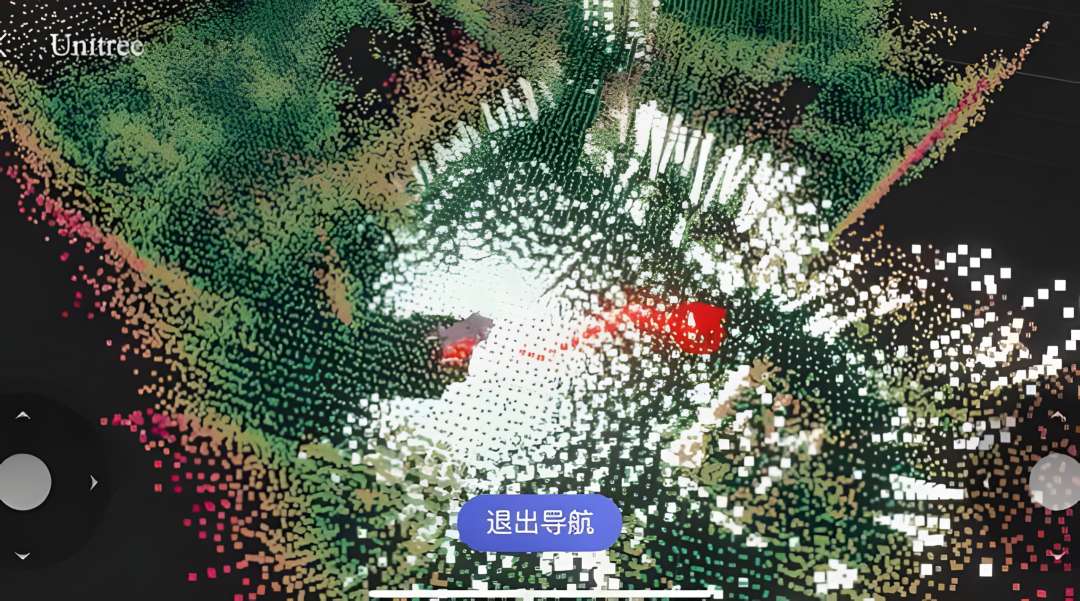 \n
\n
\n
\nMando con pantalla y c�mara dual
\n \n\n El mando a distancia incluido incorpora una pantalla t�ctil LCD de alta \n luminosidad de 5,5 pulgadas a 1080P con Android 9.0 (2 GB de RAM / 16 \n GB de almacenamiento). Su bater�a interna de 10 200 mAh sostiene \n 13 horas de operaci�n en campo y se recarga en 5 horas mediante \n carga r�pida PD 20 W. El accesorio de c�mara dual a�ade una unidad compacta \n (FOV 120�, faro de b�squeda de 8 W con 120~140 lm) que transmite v�deo \n en directo a la pantalla del controlador. El soporte para tarjeta SIM externa \n permite datos m�viles en el controlador independientemente del enlace 4G \n propio del robot. La fotograf�a siguiente ilustra la interacci�n natural \n persona-robot que facilita el sistema de control intuitivo. \n
\n \n
\n
\n
\nConstrucci�n robusta y bater�a de larga duraci�n
\n \n\n El chasis del Go2 EDU combina elementos estructurales de aleaci�n de aluminio \n con paneles de pl�stico t�cnico de alta resistencia. Con 70�31�40 cm en \n posici�n erguida y 76�31�20 cm agachado, el robot cabe en maletines de \n transporte est�ndar. La bater�a inteligente de larga duraci�n de \n 15 000 mAh proporciona 2~4 horas de operaci�n en campo y se \n recarga con el cargador r�pido dedicado de 33,6 V / 9 A. El sistema de \n gesti�n de bater�a incorpora protecci�n contra sobretemperatura, sobrecarga y \n cortocircuito. La imagen siguiente muestra al Go2 operando en un exigente \n entorno exterior � terreno rocoso mojado con baja iluminaci�n � demostrando la \n resiliencia estructural y locomotora que la plataforma aporta a los \n emplazamientos de inspecci�n m�s dif�ciles. \n
\n \n
\n
\n
\nEspecificaciones t�cnicas del Unitree Go2 EDU ENT U5
\n \nDimensiones mec�nicas
\n| Dimensiones (erguido) | \n70�31�40 cm | \n
|---|---|
| Dimensiones (agachado) | \n76�31�20 cm | \n
| Peso (con bater�a) | \n~15 kg | \n
| Material de la carcasa | \n\n Aleaci�n de aluminio + pl�stico t�cnico de alta resistencia \n | \n
Rendimiento
\n| Carga �til (nominal / m�x.) | \n~8 kg / ~12 kg | \n
|---|---|
| Velocidad de desplazamiento | \n0~3,7 m/s (l�mite ~5 m/s) | \n
| Altura m�xima de escal�n | \n~16 cm | \n
| �ngulo m�ximo de pendiente | \n40� | \n
Par�metros articulares
\n| Par m�ximo de articulaci�n | \n~45 N.m | \n
|---|---|
| N�mero de motores articulares | \n\n 12 � motores de precisi�n de aleaci�n de aluminio \n | \n
| Rango de movimiento � cuerpo | \n-48�~+48� | \n
| Rango de movimiento � muslo | \n-200�~+90� | \n
| Rango de movimiento � pantorrilla | \n-156�~-48� | \n
| \n Circuito intra-articular (rodilla) \n | \nS� | \n
| \n Refrigeraci�n por conducto de calor \n | \nS� | \n
Alimentaci�n y electricidad
\n| Tensi�n de operaci�n | \n28~33,6 V | \n
|---|---|
| Potencia m�xima de trabajo | \n~3000 W | \n
| \n Capacidad de la bater�a inteligente \n | \n15 000 mAh (larga duraci�n) | \n
| Autonom�a de la bater�a | \n~2~4 h | \n
| Cargador | \n33,6 V / 9 A (carga r�pida) | \n
Sensores y percepci�n
\n| LiDAR 4D | \n\n Unitree L2 � cobertura 360��96�, detecci�n m�n. 0,05 m \n | \n
|---|---|
| C�mara frontal | \nGran angular HD, 1280�720, FOV 120� | \n
| C�mara de profundidad | \nS� (incluida) | \n
| Sensor de fuerza en pata | \nS� | \n
| \n M�dulo de posicionamiento vectorial inal�mbrico \n | \nS� (ISS 2.0) | \n
Computaci�n y conectividad
\n| Potencia de computaci�n b�sica | \nCPU de alto rendimiento de 8 n�cleos | \n
|---|---|
| M�dulo IA opcional | \nNVIDIA Jetson Orin NX/Nano (40~100 TOPS) | \n
| Wi-Fi | \nWi-Fi 6 banda dual | \n
| Bluetooth | \n5.2 / 4.2 / 2.1 | \n
| M�dulo 4G | \n\n S� � con GPS (compatible con 43 pa�ses europeos) \n | \n
| Desarrollo secundario | \nS� � acceso completo | \n
| Funci�n de voz | \n\n S� � interacci�n offline, comandos, intercomunicador, m�sica \n | \n
| Actualizaciones OTA | \nS� | \n
| Garant�a | \n12 meses | \n
Mando a distancia con pantalla
\n| Pantalla | \n\n 5,5 pulgadas 1080P LCD de alta luminosidad t�ctil \n | \n
|---|---|
| Sistema operativo | \nAndroid 9.0, 2 GB RAM, 16 GB almacenamiento | \n
| Dimensiones | \n189�138�41 mm (antenas plegadas) | \n
| Peso | \n850 g | \n
| Bater�a | \n10 200 mAh, 7,4 V 2S litio | \n
| Carga r�pida | \nPD 20 W | \n
| Tiempo de carga | \n~5 h | \n
| Autonom�a del controlador | \n~13 h | \n
| Interfaces | \n\n USB-A (carga), Type-C (firmware / transferencia), ranura SIM externa \n | \n
C�mara dual (accesorio del mando)
\n| FOV c�mara | \n120� | \n
|---|---|
| Dimensiones | \n106�25�41 mm | \n
| Peso | \n108 g | \n
| Consumo | \n3 W | \n
| Potencia / Flujo del faro | \n8 W / 120~140 lm (tipo transl�cido) | \n
Gimbal de doble luz (payload U5)
\n| Estabilizaci�n | \n3 ejes (rumbo / inclinaci�n / balanceo) | \n
|---|---|
| Tensi�n de trabajo | \n11~25,2 V (3S~6S) | \n
| Consumo | \nMedio 6 W / Pico 15 W | \n
| Temperatura de trabajo | \n-10~50 �C | \n
| Dimensiones | \n73,5�75�131,5 mm | \n
| \n Peso (sin / con placa amortiguadora) \n | \n177 g / 197 g | \n
| Oscilaci�n angular | \n�0,01� | \n
| Rango de inclinaci�n controlable | \n-90�~+25� | \n
| Rotaci�n horizontal controlable | \n-270�~+270� | \n
| Rango de balanceo | \n-45�~+45� | \n
C�mara de luz visible (gimbal)
\n| Objetivo | \n\n Foco fijo, zoom digital 6�, equivalente 20 mm \n | \n
|---|---|
| Sensor de imagen | \n\n Sony CMOS 1/2.8 pulgadas, 8 MP p�xeles efectivos \n | \n
| Apertura | \nF2,8 | \n
| Campo visual | \nDiagonal 93� / Horizontal 84,5� | \n
| Resoluci�n de v�deo | \n4K / 2K / 1080p / 720p @ 30 fps | \n
| Resoluci�n de foto | \n4K (3840�2160) | \n














 Robot Humanoide")
 Robot Humanoide")




















 � Robot de Publicidad y Hostes")

