









- Disponibilidade: Em stock
- Código do produto: GO2-EDU-ENT-U6
- Peso bruto: 35.00
\n El Unitree Go2 EDU ENT U6 es un robot cuadr�pedo de grado \n profesional dise�ado para operaciones en entornos peligrosos, equipado con el \n LiDAR 4D L2 de desarrollo propio de Unitree con cobertura hemisf�rica \n de 360��96�, un sistema de comunicaci�n dual 5.8G/4G, un \n foco de 30 W y 3000 l�menes, una suite de detecci�n de siete gases y \n una bater�a de larga duraci�n de 15000 mAh � todo en un chasis de \n aleaci�n de aluminio de 15 kg capaz de alcanzar una velocidad punta de \n aproximadamente 5 m/s. \n
\n \n| Velocidad m�xima de desplazamiento | \n~5 m/s (punta, medida en laboratorio) | \n
|---|---|
| Cobertura LiDAR 4D | \n360��96� hemisf�rica, detecci�n m�nima 0,05 m | \n
| Autonom�a de la bater�a | \n~2�4 h (bater�a de larga duraci�n 15000 mAh) | \n
| Sistema de iluminaci�n | \n30 W, 3000 l�menes | \n
\n La imagen siguiente captura al Go2 EDU realizando una secuencia de movimiento \n din�mico sobre una terraza de madera exterior � una demostraci�n del sistema \n de locomoci�n Rage Mode que aprovecha al m�ximo el potencial de los motores \n articulares para lograr mayor velocidad, respuesta de direcci�n m�s precisa y \n estabilidad en superficies irregulares. \n
\n \n
\n
\n
\nLiDAR 4D L2: consciencia situacional 360� con detecci�n desde 0,05 m
\n \n\n La evasi�n de obst�culos es tan fiable como el sensor que la alimenta. El Go2 \n EDU incorpora el \n LiDAR 4D L2 de desarrollo propio de Unitree � un esc�ner \n hemisf�rico 360��96� con una distancia de detecci�n m�nima de tan solo \n 0,05 m. Ese punto ciego casi nulo resulta determinante en pasillos \n industriales estrechos y escenarios de rescate en incendios donde los objetos \n aparecen repentinamente a corta distancia. El LiDAR habilita simult�neamente \n la cartograf�a 3D en tiempo real: el robot construye una nube de puntos del \n �rea de operaci�n a trav�s de la aplicaci�n y navega de forma aut�noma \n siguiendo los trayectos definidos por el operador. \n
\n \n\n La fotograf�a siguiente muestra el Sistema Inteligente de Seguimiento Lateral \n ISS 2.0 en operaci�n exterior, con la superposici�n de digitalização LiDAR \n renderizada en tiempo real mientras el robot sigue a una persona en movimiento \n entre obst�culos. \n
\n \n
\n
\n
\nISS 2.0 � Sistema Inteligente de Seguimiento Lateral
\n \n\n El Sistema Inteligente de Seguimiento Lateral de segunda generaci�n (ISS 2.0) \n emplea el m�dulo de posicionamiento vectorial inal�mbrico de desarrollo propio \n de Unitree para una precisi�n de posicionamiento plano centim�trica � una \n mejora del 50% respecto a la generaci�n anterior. El alcance de control remoto \n supera los 30 m en entornos despejados. Cuando el operador se desplaza, \n el Go2 lo sigue lateralmente, sorteando obst�culos de forma din�mica en lugar \n de detenerse. Para misiones de patrulla en instalaciones y roles de asistencia \n a primeros intervinientes, este comportamiento reduce significativamente la \n carga cognitiva del operador. \n
\n \nSistema perceptivo frontal: c�mara, luz y audio en una sola cabeza
\n \n\n La cabeza frontal del Go2 EDU integra todo lo necesario para la inspecci�n \n visual remota. La c�mara gran angular resuelve a 1280�720 px con un \n campo visual de 120�, transmitiendo v�deo 720p 60fps con apertura F2.2 \n en condiciones sin interferencias. La l�mpara frontal ilumina pasillos oscuros \n sin equipamiento auxiliar. El primer plano siguiente muestra el conjunto \n �ptico y de iluminaci�n que da soporte al sistema de detecci�n de doble c�mara \n del ENT U6. \n
\n \n
\n
\n
\n\n Sistemas t�cticos ENT U6: comunicaci�n, iluminaci�n y detecci�n ambiental \n
\n \n\n La configuraci�n ENT U6 a�ade una capa de capacidades cr�ticas a la plataforma \n EDU est�ndar. La infograf�a de hardware siguiente muestra todos los \n subsistemas integrados � desde el m�dulo de seguimiento y el micr�fono de \n intercomunicaci�n hasta la bater�a inteligente y el conjunto de sensores de \n fuerza en pata. \n
\n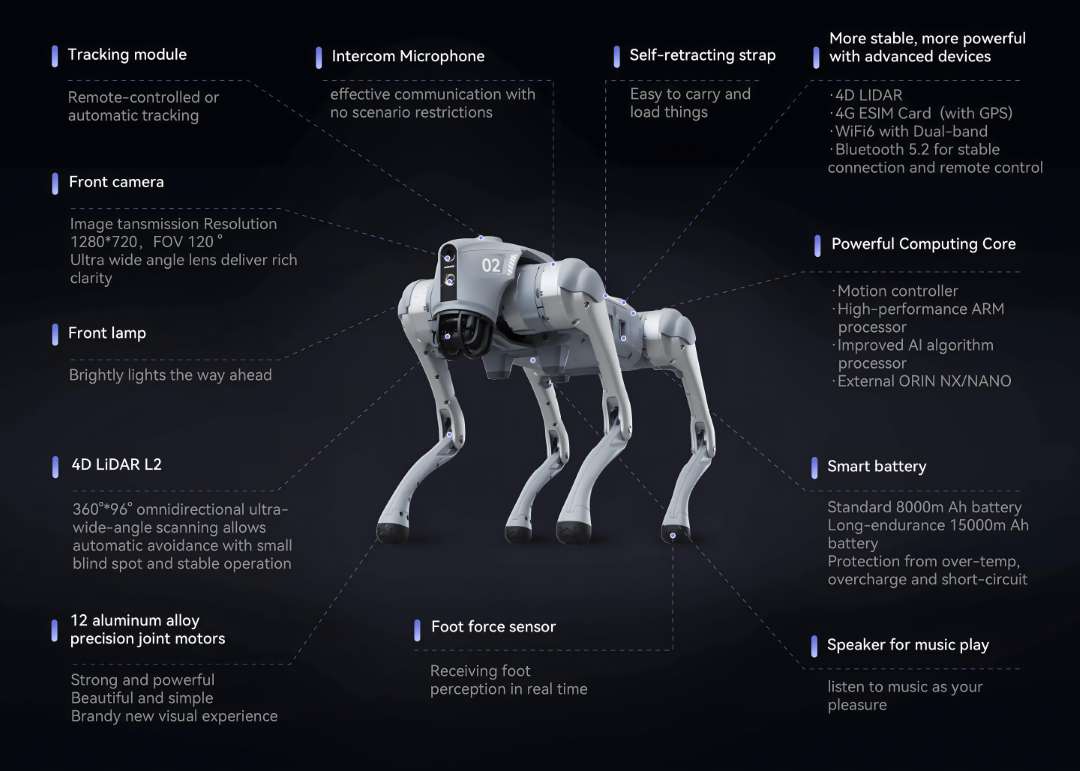 \n
\n
\n
\nComunicaci�n de doble enlace: 5.8G principal + 4G de respaldo
\n \n\n Las radios de frecuencia �nica fallan en entornos con alta densidad de RF. El \n ENT U6 lo resuelve con una arquitectura de dos canales: el enlace principal \n opera en 5.8G digital con telemetr�a integrada y transmisi�n de v�deo, \n entregando v�deo HD dual-canal 1080P con una latencia de tan solo \n 180 ms a trav�s de entrada de flujo Ethernet est�ndar. Cuando el enlace \n principal se interrumpe, el canal de respaldo 4G all-netcom (con GPS) \n conmuta autom�ticamente. La pantalla antiexplosiva soporta paso de red 4G \n completo. \n
\n \nFoco de 30 W y sistema de luz de advertencia tipo policial
\n \n\n La oscuridad y la se�alizaci�n visual son dos constantes en el rescate en \n incendios y la patrulla industrial. El foco del ENT U6 entrega \n 3000 l�menes a 30 W � suficiente para iluminar un pasillo industrial \n est�ndar o �rea de b�squeda a distancia operativa. El sistema de luz de \n advertencia emite 10 W en modos de destello policial rojo/azul, \n permitiendo la delimitaci�n de zonas de seguridad y el aviso de personal sin \n equipo adicional. El sistema de difusi�n de voz digital alcanza una distancia \n m�xima de propagaci�n de 500�800 m, admitiendo llamada en tiempo real, \n reproducci�n de grabaciones, texto a voz y modos de destello de r�faga. \n
\n \nDetecci�n de siete gases integrada en la aplicaci�n Go2
\n \n\n La interfaz de detecci�n de gases del ENT U6 est� completamente integrada en \n la aplicaci�n oficial Go2 � no se requiere programa adicional. La suite de \n sensores monitoriza simult�neamente humedad, ox�geno, mon�xido de carbono, \n di�xido de carbono, metano, sulfuro de hidr�geno y benceno, cada uno con una \n precisi�n de �3%. Esto hace que la plataforma sea directamente desplegable \n para la evaluaci�n atmosf�rica post-incidente en emergencias industriales sin \n trabajo de integraci�n con terceros. \n
\n \n\n Cartograf�a 3D LiDAR: navegaci�n aut�noma desde la nube de puntos hasta el \n trayecto \n
\n \n\n La visualizaci�n de nube de puntos siguiente, generada por el LiDAR L2 del Go2 \n y renderizada en la aplicaci�n, demuestra la densidad y fidelidad espacial \n alcanzables en un entorno interior complejo. A partir de este mapa, los \n operadores especifican puntos de destino; el robot ejecuta la navegaci�n \n aut�noma usando posicionamiento SLAM con planificaci�n de ruta actualizada en \n tiempo real. \n
\n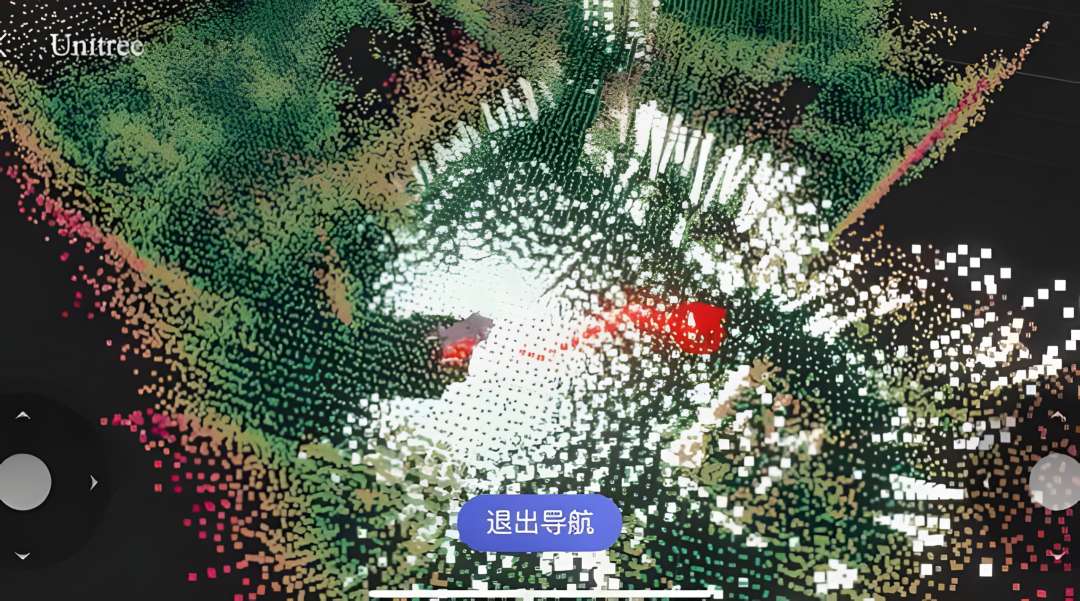 \n
\n
\n
\nPlataforma EDU abierta: desarrollo secundario completo con ROS2 y DDS
\n \n\n El nivel EDU es la �nica variante del Go2 que abre la interfaz de desarrollo \n secundario completa. Toda la comunicaci�n entre m�dulos fluye a trav�s de DDS, \n compatible con el IDL de ROS2 � lo que permite portar bases de c�digo de \n laboratorio existentes, controladores de sensores y flujos de visualizaci�n \n con trabajo m�nimo de adaptaci�n. El SDK se comunica a \n 500 Hz tanto en la interfaz de bajo nivel como en la de alto nivel. Se \n proporcionan enlaces para C++ y Python. Una \n estaci�n de anclaje NVIDIA Jetson Orin NX/NANO \n opcional (40�100 TOPS) ampl�a la capacidad de IA a bordo para pol�ticas de \n navegaci�n basadas en visi�n, reconocimiento de objetos y cargas de trabajo de \n inferencia personalizadas. \n
\n \n\n La escena siguiente ilustra el comportamiento interactivo del Go2 EDU en \n interiores: los comandos de voz, la respuesta gestual y la interacci�n en \n proximidad son todos accesibles a trav�s de la aplicaci�n Go2 y el sistema de \n reconocimiento de voz sin conexi�n. \n
\n \n
\n
\n
\n\n Locomoci�n en todo terreno: 40� de �ngulo de escalada, 16 cm de altura de \n obst�culo, ~5 m/s de punta \n
\n \n\n Los doce motores articulares de aleaci�n de aluminio del Go2 EDU alcanzan un \n par punta de \n ~45 N.m, con enfriadores de tubo de calor en cada articulaci�n para \n mantener el rendimiento durante operaciones prolongadas. El controlador Rage \n Mode desbloquea la envolvente cinem�tica completa: la velocidad nominal m�xima \n es 3,7 m/s con una cifra punta medida en laboratorio de ~5 m/s. \n El �ngulo de escalada alcanza los 40�; la altura de paso es de \n ~16 cm. Los sensores de fuerza en pata � exclusivos de EDU y superiores \n � proporcionan percepci�n del contacto en tiempo real, permitiendo al \n controlador de movimiento adaptar din�micamente el paso a los cambios de \n rigidez de la superficie. \n
\n \n\n La imagen siguiente muestra al Go2 EDU de pie sobre una superficie rocosa en \n agua poco profunda � una prueba de la estabilidad locomotora en sustratos \n irregulares y de la resistencia del chasis de aleaci�n de aluminio y pl�stico \n t�cnico en condiciones h�medas. \n
\n \n
\n
\n
\nEspecificaciones t�cnicas del Unitree Go2 EDU ENT U6
\n \nDimensiones mec�nicas
\n| Modelo | \nGo2 EDU ENT U6 | \n
|---|---|
| Dimensiones � en pie (L � An � H) | \n70 cm � 31 cm � 40 cm | \n
| \n Dimensiones � agachado (L � An � H) \n | \n76 cm � 31 cm � 20 cm | \n
| Peso (con bater�a) | \n~15 kg | \n
| Material de la carcasa | \n\n Aleaci�n de aluminio + pl�stico t�cnico de alta resistencia \n | \n
| \n Altura libre al suelo en posici�n de pie \n | \n0,33 m | \n
Par�metros el�ctricos
\n| Tensi�n de funcionamiento | \n28�33,6 V | \n
|---|---|
| Potencia m�xima de trabajo | \n~3000 W | \n
Par�metros de rendimiento
\n| Carga �til (t�pica) | \n~8 kg | \n
|---|---|
| Carga �til (m�xima) | \n~12 kg | \n
| \n Velocidad nominal de desplazamiento \n | \n0�3,7 m/s | \n
| \n Velocidad m�xima (punta, medida en laboratorio) \n | \n~5 m/s | \n
| Altura m�xima de escalada / ca�da | \n~16 cm | \n
| �ngulo m�ximo de escalada | \n40� | \n
| Potencia de computaci�n b�sica | \nCPU de alto rendimiento de 8 n�cleos | \n
Par�metros articulares
\n| Par articular punta | \n~45 N.m | \n
|---|---|
| Motores articulares | \n\n 12 motores de precisi�n de aleaci�n de aluminio \n | \n
| \n Rango de movimiento � balanceo del cuerpo \n | \n-48�~+48� | \n
| Rango de movimiento � muslo | \n-200�~+90� | \n
| Rango de movimiento � espinilla | \n-156�~-48� | \n
| \n Circuito intra-articular (rodilla) \n | \nS� | \n
| \n Enfriador de tubo de calor articular \n | \nS� | \n
Sensores y percepci�n
\n| LiDAR 4D | \n\n Unitree L2 � 360��96� hemisf�rico, detecci�n m�nima 0,05 m \n | \n
|---|---|
| C�mara HD frontal | \n\n 1280�720 px, 120� FOV, apertura F2.2, transmisi�n 720p 60fps \n | \n
| \n M�dulo de posicionamiento vectorial inal�mbrico \n | \n\n S� � UWB, precisi�n centim�trica planar, ISS 2.0 \n | \n
| Sensor de fuerza en pata | \nS� � percepci�n de contacto en tiempo real | \n
Sistema de comunicaci�n ENT U6
\n| Banda de comunicaci�n principal | \n\n 5.8G � telemetr�a integrada + transmisi�n digital de v�deo \n | \n
|---|---|
| Comunicaci�n de respaldo | \n4G all-netcom (con GPS) | \n
| \n Resoluci�n de transmisi�n de v�deo \n | \n1080P HD, dual canal | \n
| Latencia de v�deo | \n~180 ms | \n
| Sistema de detecci�n de imagen | \n\n Doble c�mara 1080P, 120� gran angular, 4 luces de relleno de alto \n brillo \n | \n
Equipamiento t�ctico ENT U6
\n| Potencia del foco | \n30 W | \n
|---|---|
| Flujo luminoso del foco | \n3000 l�menes | \n
| Sistema de luz de advertencia | \nPatr�n policial rojo/azul, 10 W | \n
| \n Alcance del sistema de difusi�n de voz digital \n | \n500�800 m distancia m�xima de propagaci�n | \n
| Funciones de difusi�n de voz | \n\n Llamada en tiempo real, reproducci�n de grabaciones, TTS, destello \n de r�faga \n | \n
Sistema de detecci�n de gases (ENT U6)
\n| Rango de medici�n de humedad | \n0�100%, precisi�n �3% | \n
|---|---|
| Rango de ox�geno (O?) | \n0�30%, precisi�n �3% | \n
| Rango de mon�xido de carbono (CO) | \n0�1000 ppm, precisi�n �3% | \n
| Rango de di�xido de carbono (CO?) | \n0�20 ppm, precisi�n �3% | \n
| Rango de metano (CH?) | \n0�100%, precisi�n �3% | \n
| \n Rango de sulfuro de hidr�geno (H?S) \n | \n0�100 ppm, precisi�n �3% | \n
| Rango de benceno | \n0�100 ppm, precisi�n �3% | \n
| Interfaz de detecci�n | \nIntegrada en la aplicaci�n oficial Go2 | \n
Conectividad e interfaces
\n| WiFi | \nWiFi 6 de doble banda | \n
|---|---|
| Bluetooth | \n5.2 / 4.2 / 2.1 | \n
| M�dulo 4G | \n\n S� � con GPS, compatible con 43 pa�ses europeos \n | \n
| Interfaces cableadas | \nEthernet + USB 458 | \n
Bater�a y alimentaci�n
\n| \n Capacidad de la bater�a inteligente \n | \n15000 mAh (larga duraci�n) | \n
|---|---|
| Autonom�a de la bater�a | \n~2�4 h | \n
| Cargador | \n33,6 V / 9 A (carga r�pida) | \n
| Protecci�n de la bater�a | \nSobretemperatura, sobrecarga, cortocircuito | \n
Programa y desarrollo
\n| Desarrollo secundario | \nCompleto (nivel EDU) | \n
|---|---|
| Interfaces de desarrollo | \n\n DDS (C++ / Python), ROS2, GST (transmisi�n de imagen) \n | \n
| Frecuencia de comunicaci�n SDK | \n500 Hz (bajo nivel y alto nivel) | \n
| \n Sistema operativo de desarrollo requerido \n | \nUbuntu 20.04 | \n
| M�dulo de IA opcional | \nNVIDIA Jetson Orin NX / NANO � 40�100 TOPS | \n
| Actualizaciones OTA | \nS� | \n
| Programaci�n gr�fica | \nS� | \n
| Funciones de voz | \n\n Interacci�n de voz sin conexi�n, comandos, intercomunicaci�n, \n reproducci�n de m�sica \n | \n
| Cartograf�a 3D LiDAR y SLAM | \n\n S� � cartograf�a, posicionamiento, navegaci�n aut�noma por trayectos \n | \n
| \n Compatibilidad con estaci�n de carga \n | \nS� | \n
Garant�a
\n| Per�odo de garant�a | \n12 meses | \n
|---|
\n \n
Contenido del paquete
\n-
\n
- Robot cuadr�pedo Unitree Go2 EDU ENT U6 (montaje completo) \n
- Mando a distancia de dos manos con pantalla \n
- Bater�a inteligente de larga duraci�n 15000 mAh (instalada) \n
- Cargador r�pido � 33,6 V / 9 A \n
- \n M�dulo t�ctico ENT U6: s






 Robot Humanoide")
 Robot Humanoide")



















 � Robot de Publicidad y Hostes")

