")
")
")



- Stock: In Stock
- Product code: 00-00013650
- Weight Brutto: 35.00kg
- SKU: GO2-EDU-40
The Unitree Go2 EDU U1 (40 TOPS) is a professional quadruped robot built for AI research, academic robotics, and advanced education — combining a 40 TOPS onboard computing dock (NVIDIA Jetson Orin), Unitree's self-developed 4D LiDAR L2 with 360°×96° hemispherical coverage, an Intel RealSense D435i depth camera, and 12 aluminium-alloy precision joint motors delivering a peak torque of 45 N.m at speeds up to 5 m/s across any terrain.
| Maximum Speed | 0 ~ 3.7 m/s (MAX ~5 m/s) |
|---|---|
| AI Computing Power | 40 TOPS (NVIDIA Jetson Orin) |
| 4D LiDAR Coverage | 360° × 96°, min detection 0.05 m |
| Battery Endurance | ~2–4 h (15,000 mAh long-endurance) |
The Go2 EDU performing a dynamic movement sequence demonstrates the extraordinary range of motion enabled by its extra-large joint space and heat-pipe-cooled motor architecture.

Embodied Intelligence — How Go2 EDU Perceives the World
4D LiDAR L2: Hemispheric All-Terrain Recognition
Most quadruped robots rely on conventional depth sensors with limited field of view. The Go2 EDU carries Unitree's proprietary 4D LiDAR L2 — a sensor that sweeps a full 360° horizontal × 96° vertical hemisphere, producing a minimum detection distance of just 0.05 m. This near-zero blind spot is what makes real-time obstacle avoidance possible at walking speed without pre-mapping the environment. The recognition capability is effectively 200% higher than standard configurations, enabling the robot to navigate gravel paths, slopes up to 40°, and steps up to 16 cm without human intervention.
- 360° × 96° hemispherical scan — minimal blind spot
- Minimum detection range: 0.05 m
- Real-time 3D point-cloud mapping via dedicated app
- Autonomous path planning and obstacle avoidance
- Supports SLAM (mapping, positioning, navigation) via DDS/ROS2
The ISS 2.0 Intelligent Side-Follow System uses the LiDAR alongside a wireless vector positioning module — achieving positioning accuracy 50% better than the previous generation, with a follow range exceeding 30 m in open environments.

Front Camera, Depth Vision, and Onboard Sensing
Beyond the LiDAR, the Go2 EDU integrates a 1280 × 720 HD wide-angle camera with a 120° field of view for real-time image streaming — transmitted via WebRTC with RTT 2.0 compression. The Intel RealSense D435i depth camera (included in the U1 variant) adds structured-light depth sensing, critical for object detection, manipulation research, and precise 3D environment reconstruction. A 3 W front lamp ensures clear imaging in low-light conditions, while the foot-end force sensors — exclusive to the EDU — provide real-time ground contact feedback that elevates gait stability on unpredictable surfaces.
A front-facing close-up of the Go2 EDU reveals the integrated HD camera module and status indicator light at the heart of its sensor suite.

12-Motor Precision Joint Architecture
All 12 knee joints use aluminium-alloy motors with intra-joint internal wiring — eliminating external cable routing that wears over time. Each joint is cooled by a dedicated heat pipe, maintaining operating temperature during extended sessions at full load. The extra-large joint range of motion (body: −48° ~ 48°, thigh: −200° ~ 90°, shank: −156° ~ −48°) enables the Go2 EDU to execute not just locomotion, but expressive behaviours: handshakes, backflips, lateral shuffles, and creative dance sequences — all programmable via the graphical programming app.
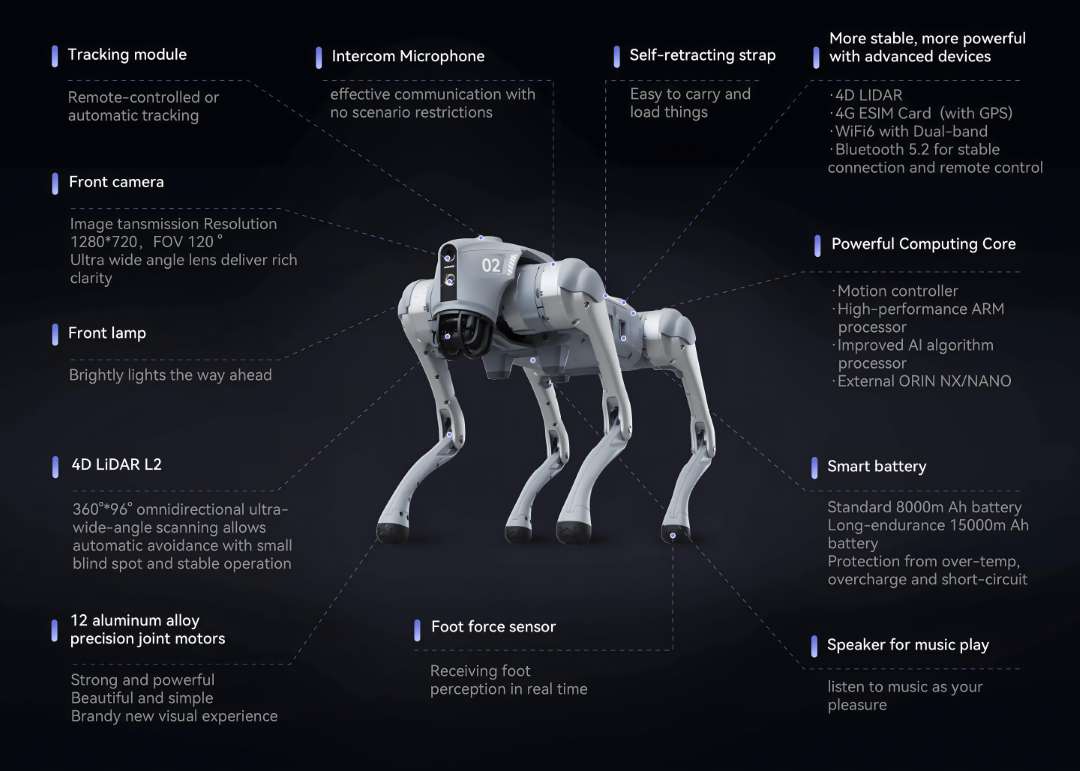
The hardware specification infographic summarises the full sensor and component ecosystem of the Go2 EDU platform.
Open Platform for Research and Secondary Development
40 TOPS Computing Dock and AI Stack
The U1 (40 TOPS) designation identifies the computing dock bundled with this variant: a station packing 40 TOPS of AI computing power via NVIDIA Jetson Orin, expandable to 100 TOPS with higher-tier Orin modules. The base 8-core high-performance CPU handles motion control, advanced AI mode, and 3D LiDAR mapping independently — the Orin dock extends capacity for deep-learning inference, custom perception pipelines, and real-time SLAM at research grade.
Development interfaces available on the EDU platform:
- DDS middleware (C++ and Python) — compatible with ROS2 via adaptive RMW
- ROS2 interface — full access to motor, radar, UWB, IMU data streams
- GST streaming — low-latency video pipeline for custom vision applications
- Graphical programming app — drag-and-drop logic builder, no coding required
- SLAM services — mapping, positioning, autonomous navigation module
The secondary development support on the EDU is the most comprehensive across the entire Go2 family — making it the natural choice for university robotics labs, R&D teams, and developers building autonomous systems on top of a proven quadruped platform.
3D LiDAR Mapping in Practice
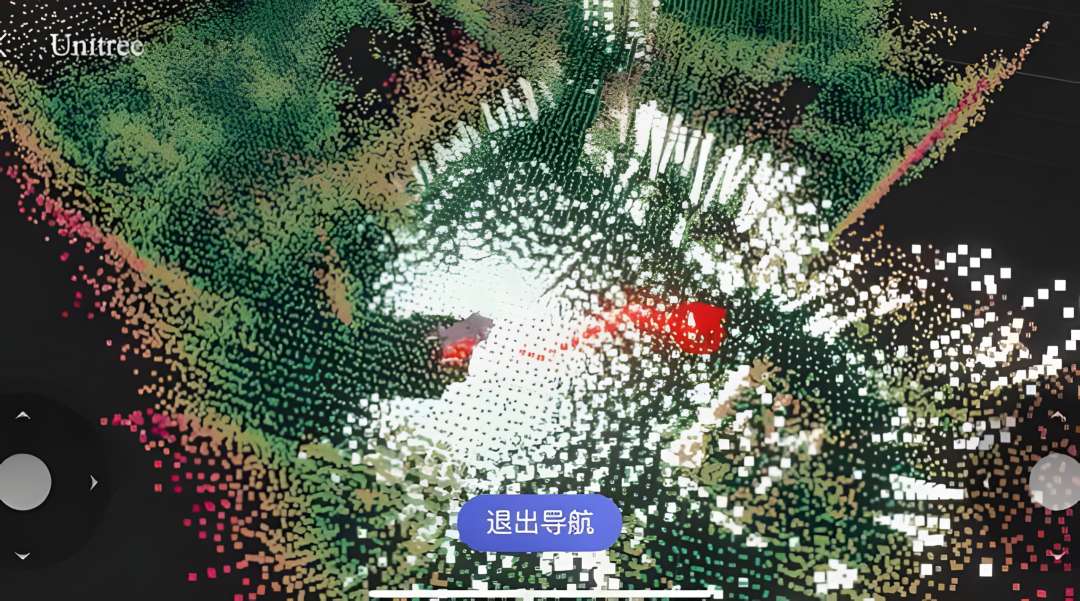
Using the dedicated companion app, the Go2 EDU constructs dense 3D point-cloud maps of any environment in real time. Operators can specify waypoints on the map, and the robot navigates autonomously — replanning around dynamic obstacles as detected by the LiDAR. This capability underpins applications from warehouse inspection and infrastructure survey to academic SLAM research.
The point-cloud map generated live by the Go2 EDU's L2 LiDAR illustrates the dense spatial data captured during autonomous navigation.
Voice Interaction, Audio, and Connectivity
Go2 EDU ships with an integrated offline voice recognition module delivering millisecond-level interaction latency — commands, queries, and intercom functions operate without an internet connection. The built-in microphone, speaker (with music playback), and 3 W front light create a complete interactive presence. For connectivity, it combines Wi-Fi 6 dual-band (802.11ax), Bluetooth 5.2/4.2/2.1, and a 4G module with eSIM and GPS — enabling remote HD video streaming, OTA firmware updates, and cloud-based telemetry from any location within 4G coverage (supported across 43 European countries).
A user interacting with the Go2 EDU indoors illustrates the robot's intuitive voice-and-gesture interaction capabilities.

Technical Specifications of the Unitree Go2 EDU U1 (40 TOPS)
Mechanical Specifications
| Dimensions (standing) | 70 cm × 31 cm × 40 cm |
|---|---|
| Dimensions (crouching) | 76 cm × 31 cm × 20 cm |
| Weight (with battery) | ~15 kg |
| Material | Aluminium alloy + High-strength engineering plastic |
Electrical Parameters
| Operating Voltage | 28 V ~ 33.6 V |
|---|---|
| Maximum Working Power | ~3000 W |
Performance Parameters
| Payload | ≈8 kg (MAX ~12 kg) |
|---|---|
| Maximum Speed | 0 ~ 3.7 m/s (MAX ~5 m/s) |
| Max Climb / Drop Height | ~16 cm |
| Max Climb Angle | 40° |
| Basic Computing Power | 8-core High-performance CPU |
Joint Parameters
| Maximum Joint Torque | ~45 N.m |
|---|---|
| Aluminium Knee Joint Motors | 12 sets |
| Range of Motion — Body | −48° ~ 48° |
| Range of Motion — Thigh | −200° ~ 90° |
| Range of Motion — Shank | −156° ~ −48° |
| Intra-Joint Circuit (Knee) | Yes |
| Joint Heat Pipe Cooler | Yes |
Sensors and Perception
| 4D LiDAR | L2, 360° × 96°, min detection 0.05 m |
|---|---|
| HD Wide-Angle Camera | 1280 × 720, FOV 120° |
| Depth Camera | Intel RealSense D435i |
| Wireless Vector Positioning Module | Yes (ISS 2.0) |
| Foot-End Force Sensor | Yes |
Connectivity
| Wi-Fi | Wi-Fi 6 dual-band, 802.11ax |
|---|---|
| Bluetooth | 5.2 / 4.2 / 2.1 |
| 4G Module | Yes, eSIM with GPS |
Software and Intelligence Features
| Intelligent OTA Updates | Yes |
|---|---|
| RTT 2.0 Image Transmission | Yes |
| Graphical Programming App | Yes |
| Voice Functions | Yes (offline interaction, commands, intercom, music) |
| ISS 2.0 Side-Follow System | Yes, >30 m range |
| Intelligent Obstacle Avoidance | Yes |
| Charging Pile Compatibility | Yes |
| Secondary Development Support | Full (DDS C++/Python, ROS2, GST) |
Power and Autonomy
| Battery | Long-endurance, 15,000 mAh |
|---|---|
| Battery Life | ~2–4 h |
| Charger | Fast charge, 33.6 V / 9 A |
| Front Lamp | 3 W |
AI Computing Module
| High Computing Power Module | NVIDIA Jetson Orin (40 TOPS) |
|---|
Warranty
| Warranty Period | 12 months |
|---|
The Go2 EDU demonstrates its all-terrain resilience — standing stable on an uneven rock surface surrounded by water, a testament to its 40° climb angle and real-time LiDAR-assisted balance control.

What's in the Box
- Unitree Go2 EDU robot (with long-endurance 15,000 mAh battery installed)
- Fast charger (33.6 V / 9 A)
- Manual remote controller
- Intel RealSense D435i depth camera
- 40 TOPS AI computing dock station
What is the difference between the Go2 EDU U1 (40 TOPS) and the standard Go2 EDU?
The Go2 EDU U1 (40 TOPS) variant includes the docking station with an NVIDIA Jetson Orin module delivering 40 TOPS of AI computing power, pre-integrated with the robot. The standard Go2 EDU supports the same optional Orin module but requires separate purchase and installation. Both include the Intel RealSense D435i depth camera, foot-end force sensors, and full secondary development support — features absent from the Go2 AIR, PRO, and X models.
Can the Go2 EDU be programmed using ROS2?
Yes. The Go2 EDU exposes a full DDS middleware interface compatible with ROS2 via an adaptive RMW layer. Developers can access motor data, radar point clouds, IMU readings, UWB positioning, and SLAM services through standard ROS2 topics. C++ and Python SDK bindings are also available. The GST video pipeline provides low-latency image streaming for custom computer vision applications.
Is the 4G connectivity available in Spain and Europe?
Yes. The non-Chinese Go2 version supports 4G connectivity across 43 European countries. Spain is fully covered. The built-in eSIM allows the robot to connect to cloud services for OTA firmware updates, HD video streaming via WebRTC, and remote telemetry — without requiring an external Wi-Fi network.
What autonomous behaviours does the Go2 EDU support out of the box?
Out of the box, the Go2 EDU supports intelligent obstacle detection and avoidance, ISS 2.0 side-follow (tracks a person autonomously at distances over 30 m), 3D LiDAR mapping with autonomous waypoint navigation, and voice command interaction. Expressive actions include moon gait, lateral stepping, cross-stepping, upward jumps, forward jumps, front flips, handshakes, sitting, stretching, and multiple dance sequences — all accessible via the companion app or remote controller.
Why Choose EXPERT3D?
EXPERT3D has been a specialist in advanced robotics and 3D technology in Spain since 2012. Our technical team provides direct pre-sales consultation, integration support, and after-sales assistance for the Unitree Go2 EDU — ensuring your research or education project gets operational from day one. Fast shipping from Valencia, official invoice, and EU warranty included.
")
")




















